一种毫米波角雷达威力覆盖范围实现方法与流程
1.本发明涉及毫米波角雷达技术领域,尤其是涉及一种毫米波角雷达威力覆盖范围实现方法。
背景技术:
2.毫米波雷达作为智能驾驶辅助系统(adas)中不可或缺的一部分,它的应用使得汽车主动安全预警系统得到了升级,给汽车驾驶提供了安全保障,在一定程度上保证了驾驶员的生命财产不受侵害。将毫米波防撞雷达应用到汽车上,可以方便的探测到目标的距离、速度及角度等信息,一旦遇到危险可以及时的提出预警。
3.由于角雷达的威力覆盖范围需求主要在车辆的正后方和侧方,正后方的探测距离目标需要达到90~100m,侧方探测距离目标需要达到50~60m。基于此距离需求,需要增大天线的阵元数以提高增益,进而提高雷达探测距离,但这样会增加天线的尺寸,减小天线俯仰面的波束宽度;并且,雷达安装在车辆的拐角上,对法线方向的探测距离要求不高,传统的设计会造成天线法线辐射方向的增益浪费。因此,考虑到一定的安装角度范围,为满足此威力覆盖范围需求,在现有雷达结构基础上减小天线增益、波束宽度及尺寸的设计压力,研究雷达天线的波束赋形及同时mimo的发射调相方式显得尤为必要。
技术实现要素:
4.针对上述问题,本专利提出了一种毫米波角雷达威力覆盖范围实现方法,包括以下步骤:s1:根据实际应用定义毫米波角雷达威力覆盖范围,设计雷达天线方向图的初始形状及确定天线的波束赋形要求;s2:根据雷达系统链路公式分别计算得天线设计所需要的发射(gtx)和接收(grx)增益要求;s3:采用同时mimo的方式,使雷达三个发射通道同时发射,并在各发射波形上进行相位调制,获得雷达在不同安装角度下对整个视场角fov范围内目标的探测结果。
5.其中,所述毫米波角雷达威力覆盖范围包括:汽车正后方最远距离车身100m处区域,及侧后方距离车身50
‑
60m处区域。
6.所述雷达天线方向图的初始形状包括:汽车正后方的梯形区域,及汽车侧后方的半圆形区域。
7.进一步的,所述雷达系统链路公式为:;;
其中,psig为接收信号功率;ptx为雷达芯片发射功率;gtx,ant 为发射天线增益;ltx 为发射馈线损耗;grx,ant 为接收天线增益;lrx 为接收馈线损耗;lrad 为雷达天线罩损耗;rcs为雷达目标散射截面;λ为工作波长;r为目标距离;grx 为接收链路增益;lbumper 为保险杠损耗;pnoise 为链路噪声;k为玻尔兹曼常数,k=1.380649
ꢀ×ꢀ
10
‑
23 j/k;t为工作温度;b为中频信号带宽;nfcascade为接收链路总噪声;snr为信噪比;根据算法检测信噪比snr要求反推得到发射和接收天线增益gtx,ant 和grx,ant。
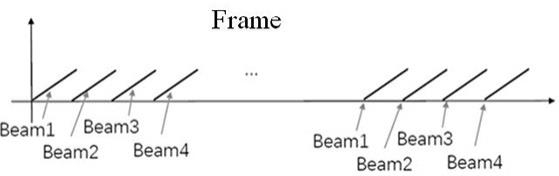
8.其中,所述s3还包括:分别通过天线的3个发射通道:通道tx1,通道tx2和通道tx3同时发射雷达波形,其中,通道tx1相位为0,通道tx2相位为0和π交替变化,通道tx3相位为0,0,π和π交替变化;进行雷达帧间相位调制,得到调相波束t。
9.进一步的,所述调相波束t在同一时刻的相位分别为beam1:tx phase=[0,0,0],beam2:tx phase=[0,π,0],beam3:tx phase=[0,0,π],beam4:tx phase=[0,π,π]。
[0010]
所述天线的3个发射通道根据所述调相波束t进行发射雷达波形,通过空间上的叠加获得不同天线方向图结果,最终获得不同雷达安装角度下的fov范围探测结果。
[0011]
所述安装角度至少为雷达相对车辆正后方35
°‑
50
°
安装角度范围。
[0012]
所述fov范围探测结果完全覆盖所述雷达天线方向图的初始形状。
[0013]
综上所述,本发明提供一种毫米波角雷达威力覆盖范围实现方法,通过对雷达天线波束进行赋形以实现角雷达对车辆正后方和侧方目标探测的威力覆盖范围需求,并且采用同时mimo(多输入多输出)的发射方式,对发射波形进行相位的调制,进一步提高雷达发射功率,进而提高信噪比,以满足角雷达在不同安装角度下对整个fov(视场角)范围内目标的准确探测。
附图说明
[0014]
图1 为毫米波角雷达威力覆盖范围需求示意图。
[0015]
图2为雷达天线方向图。
[0016]
图3为雷达发射相位调制示意图。
[0017]
图4为雷达帧间调相波束示意图。
[0018]
图5为雷达35
°
安装角度下beam1威力覆盖范围。
[0019]
图6为雷达35
°
安装角度下beam2威力覆盖范围。
[0020]
图7为雷达35
°
安装角度下beam3威力覆盖范围。
[0021]
图8为雷达35
°
安装角度下beam4威力覆盖范围。
[0022]
图9为雷达50
°
安装角度下beam1威力覆盖范围。
[0023]
图10为雷达50
°
安装角度下beam2威力覆盖范围。
[0024]
图11为雷达50
°
安装角度下beam3威力覆盖范围。
[0025]
图12为雷达50
°
安装角度下beam4威力覆盖范围。
具体实施方式
[0026]
为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员
在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0027]
本专利提出了一种毫米波角雷达威力覆盖范围实现方法,包括以下步骤:s1:根据实际应用定义毫米波角雷达威力覆盖范围,设计雷达天线方向图的初始形状及确定天线的波束赋形要求;s2:根据雷达系统链路公式分别计算得天线设计所需要的发射(gtx)和接收(grx)增益要求(如图2所示);s3:采用同时mimo的方式,使雷达三个发射通道同时发射,并在各发射波形上进行相位调制,获得雷达在不同安装角度下对整个视场角fov范围内目标的探测结果。
[0028]
其中,所述毫米波角雷达威力覆盖范围包括:汽车正后方最远距离车身100m处区域,及侧后方距离车身50
‑
60m处区域。
[0029]
所述雷达天线方向图的初始形状包括:汽车正后方的梯形区域,及汽车侧后方的半圆形区域。
[0030]
进一步的,所述雷达系统链路公式为:;;其中,psig为接收信号功率;ptx为雷达芯片发射功率;gtx,ant 为发射天线增益;ltx 为发射馈线损耗;grx,ant 为接收天线增益;lrx 为接收馈线损耗;lrad 为雷达天线罩损耗;rcs为雷达目标散射截面;λ为工作波长;r为目标距离;grx 为接收链路增益;lbumper 为保险杠损耗;pnoise 为链路噪声;k为玻尔兹曼常数,k=1.380649
ꢀ×ꢀ
10
‑
23 j/k;t为工作温度;b为中频信号带宽;nfcascade为接收链路总噪声;snr为信噪比;根据算法检测信噪比snr要求反推得到发射和接收天线增益gtx,ant 和grx,ant。
[0031]
其中,(如图3所示)所述s3还包括:分别通过天线的3个发射通道:通道tx1,通道tx2和通道tx3同时发射雷达波形,其中,通道tx1相位为0,通道tx2相位为0和π交替变化,通道tx3相位为0,0,π和π交替变化;进行雷达帧间相位调制,得到调相波束t(如图4所示)。
[0032]
进一步的,所述调相波束t在同一时刻的相位分别为beam1:tx phase=[0,0,0],beam2:tx phase=[0,π,0],beam3:tx phase=[0,0,π],beam4:tx phase=[0,π,π]。
[0033]
所述天线的3个发射通道根据所述调相波束t进行发射雷达波形,通过空间上的叠加获得不同天线方向图结果,最终获得不同雷达安装角度下的fov范围探测结果。
[0034]
所述安装角度至少为雷达相对车辆正后方35
°‑
50
°
安装角度范围。
[0035]
所述fov范围探测结果完全覆盖所述雷达天线方向图的初始形状。
[0036]
作为另一优选实施例,如图5
‑
8所示,采用本发明所述的方法,即结合上述步骤1
‑
3使得天线方向图在空间上进行合成以满足角雷达不同安装角度下的威力覆盖范围需求。例如,分别为雷达相对车辆正后方35度安装角度下4种相位调制的雷达fov覆盖范围,图中,s1区域为雷达威力覆盖范围需求,s2为通过此方法设计得到的实际雷达威力覆盖范围,在此种天线波束赋形及相位调制的方法下,雷达威力覆盖范围能满足图1的要求,结果参见图5为雷达35
°
安装角度下beam1威力覆盖范围;图6为雷达35
°
安装角度下beam2威力覆盖范围;
图7为雷达35
°
安装角度下beam3威力覆盖范围;图8为雷达35
°
安装角度下beam4威力覆盖范围。
[0037]
同理,图9~12分别为雷达相对车辆正后方50度安装角度下4种相位调制的雷达fov覆盖范围,在此种天线波束赋形及相位调制的方法下,雷达威力覆盖范围同样满足图1的要求。具体为:图9为雷达50
°
安装角度下beam1威力覆盖范围;图10为雷达50
°
安装角度下beam2威力覆盖范围;图11为雷达50
°
安装角度下beam3威力覆盖范围;图12为雷达50
°
安装角度下beam4威力覆盖范围。因此,通过本技术方案的设计方法,可使角雷达在相对车辆正后方35
°
~50
°
安装角度范围内的威力覆盖范围均能满足需求。
[0038]
可见,通过本发明方案的设计实施方法,减小了对雷达天线的增益、波束宽度、尺寸等的设计要求,保证了在现有雷达结构及天线设计的基础上优化实现角雷达的威力覆盖范围。
[0039]
以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对本发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1