光栅压缩器波前畸变在线测量装置及测量方法与流程
1.本发明涉及光学精密测量技术领域,尤其涉及一种光栅压缩器波前畸变在线测量装置以及一种光栅压缩器波前畸变在线测量方法。
背景技术:
2.自1960年第一台激光器问世以来,“更短脉宽、更高能量”一直是激光技术发展追求的重要目标。超高峰值功率激光技术的发展使得人们可以在实验室创造前所未有的极端物态条件,如超高温度黑体辐射、超高加速度、超强磁场等,为天体物理、激光核聚变、等离子体物理等研究领域带来了难得的发展机遇。
3.超高峰值功率激光装置,是指峰值功率能达到拍瓦(pw)量级的激光装置。
4.目前获得超高峰值功率激光脉冲的最主要方法是1985年提出的啁啾脉冲放大技术,啁啾脉冲放大系统主要组成部分为振荡器、展宽器、放大器以及压缩器。其放大过程为:先利用展宽器给振荡器输出的低能量宽光谱超短脉冲激光引入一定色散,使其在时间上展宽,之后经过放大器进行放大,从而保证了放大后其时间与空间上能量密度均不会损伤光学元件,最后利用压缩器引入与展宽器等器件相反的色散,在时间上完成压成,从而获得超高峰值功率激光脉冲。因此,压缩器是啁啾脉冲放大系统的关键器件之一。
5.衍射光栅对是最常使用的压缩器构型,一般使用两对对称排布的衍射光栅或者一对光栅及一个反射镜组成,不同波长光在第一面及最后一面光栅上重合,因为衍射效应,在第二面及第三面光上的位置分离,从而实现色散补偿。2019年,zhaoyang li等首次在文献《complex spatiotemporal coupling distortion pre-compensation with double-compressorsfor an ultra-intense femtosecond laser》中提出,由于不同波长衍射光在光栅第二面及第三面上空间位置不一致,因此光栅非理想衍射波前会给不同波长光附加不同的波前畸变,这一波前畸变无法通过常规自适应光学手段进行补偿,从而给压缩后的超高峰值功率激光束引入时空耦合效应,严重影响光束近场及远场光斑质量及时空特性。因此,需要对光栅衍射波前进行精确测量,以通过其他方式进行补偿。
6.光栅衍射波前主要由光栅基底面形误差以及刻线加工误差决定,但受到光束入射角、衍射级次、夹持应变等因素影响。因此,对于压缩器中会引起时空耦合畸变效应的第二及第三面光栅衍射波前,最理想方式是在压缩器安装好后进行在线测量,测量结果与使用状态将完全吻合。常规使用干涉仪进行衍射波前测量方式仅仅适用于离线单一光栅测量,而仅使用波前传感器进行在线测量则无法避免压缩器第一面光栅、压缩器第四面光栅、测量光路中其他光学元件及系统误差波前对测量结果影响。此外,常规测量方法在过程中,还会遇到测量波长与实际使用波长不匹配,测量光源难以与搭建好的激光系统耦合等问题。
7.本发明就是基于这种情况做出的。
技术实现要素:
8.本发明目的是克服了现有技术的不足,提供一种针对安装在真空腔体内的超高峰
值功率激光装置光栅压缩器的时空耦合波前畸变测量装置与方法,能够实现对待测光栅压缩器在线、快速、高精度的波前测量。
9.本发明可以通过以下技术方案实现的:
10.一种光栅压缩器波前畸变在线测量装置,包括能产生中心波长可变的窄带准直宽激光光束并入射到待测光栅压缩器中的可变波长光源模块、能将待测光栅压缩器出射的待测光束引出并对待测光束进行全口径光束波前测量的取样及波前测量模块、能获得取样及波前测量模块采集到的信息并通过计算分析得出待测光栅压缩器的时空耦合波前畸变的计算机处理模块;所述计算机处理模块与取样及波前测量模块之间通信连接。
11.如上所述的一种光栅压缩器波前畸变在线测量装置,所述取样及波前测量模块包括用于反射待测光栅压缩器出射的待测光束从而将待测光束引出的取样反射镜组,所述取样反射镜组的后方设有用于对待测光束进行缩束的缩束透镜组,所述缩束透镜组后方设有用于测量待测光束波前的波前传感器;其中,所述缩束透镜组将待测光束口径缩束至与波前传感器测量的口径一致且消除了色差。
12.如上所述的一种光栅压缩器波前畸变在线测量装置,所述计算机处理模块包括用于采集波前传感器的波前测量信号图并进行处理的图像采集处理单元、用于分析多个不同波长的待测光束的波前信息从而得到待测光栅压缩器时空耦合畸变波前数据的分析处理单元,所述图像采集处理单元与波前传感器通信连接。
13.如上所述的一种光栅压缩器波前畸变在线测量装置,所述可变波长光源模块包括振荡器、展宽器、放大器以及空间滤波器,所述空间滤波器包括能对光束扩束准直的倒置望远镜,所述展宽器的凸面镜上设有能移动位置从而实现波长选择的狭缝结构。
14.本发明还可以通过以下技术方案实现的:
15.一种光栅压缩器波前畸变在线测量方法,使用上述的测量装置,包括以下步骤:
16.a,调整可变波长光源模块,使用可变波长光源模块产生中心波长为λ0的激光光束入射待测光栅压缩器,待测光栅压缩器出射待测光束;
17.b,使用取样及波前测量模块对步骤a中待测光栅压缩器出射的待测光束进行波前测量,测量结果为w0(x,y),其中;x和y表示组成二维坐标系的两个方向;
18.c,调整可变波长光源模块,使用可变波长光源模块产生中心波长为λ1的激光光束入射待测光栅压缩器,待测光栅压缩器出射待测光束;其中,中心波长为λ1的激光光束相对于中心波长为λ0的激光光束的波长改变量满足:二者的激光光束在第二面光栅及第三面光栅之间传播时的横向平移量经缩束透镜组缩束后等于取样及波前测量模块中的波前传感器的最小分辨像元;
19.d,使用取样及波前测量模块对步骤c中待测光栅压缩器出射的待测光束进行波前测量,测量结果为w1(x,y);
20.e,使用计算机处理模块对步骤c和步骤d中测得的波前数据进行收集和分析计算,得出两次测量结果之差的累加值为w(x,y),其中
[0021][0022]
所述w(x,y)即为待测光栅压缩器的时空耦合畸变波前。
[0023]
如上所述的一种光栅压缩器波前畸变在线测量方法,对于所出射的光束经缩束透镜组缩束后的口径超过波前传感器能测量的最大光束口径的大型待测光栅压缩器的测量,包括以下具体步骤:对该大型待测光栅压缩器进行若干次测量,每次测量步骤均包括步骤a至步骤e,且每次测量中步骤a使用的激光光束的中心波长的均不相同,最后将每次测量中步骤e得到的不同空间位置的计算的结果进行拼接,得到该大型待测光栅压缩器全口径波前畸变。
[0024]
如上所述的一种光栅压缩器波前畸变在线测量方法,步骤a和步骤b中调整可变波长光源模块具体包括以下步骤:移动狭缝结构的位置使得可变波长光源模块的波长改变。
[0025]
与现有技术相比,本发明有如下优点:
[0026]
该发明可实现对已安装调试完毕的待测光栅压缩器时空耦合畸变波前(即待测光栅压缩器的第二面光栅与第三面光栅衍射波前在光束衍射方向的变化分量)的在线测量,测量中待测光栅压缩器排布方式与实际使用时完全一致,避免了因为入射角、元件加持方式、衍射级次等在测量与实际使用中不一致而引入的影响;测量过程可以除需要增加简单的诊断系统外,光源部分可以依托超高峰值功率激光装置振荡器及展宽器,不需要对光路进行任何调整,测量过程简便。另外,使用不同波长测量结果相减的测量方式,测量结果对光学系统系统误差及波前传感器固有误差不敏感,可以保证极高的测量精度及测量灵敏度。
附图说明
[0027]
下面结合附图对本发明的具体实施方式作进一步详细说明,其中:
[0028]
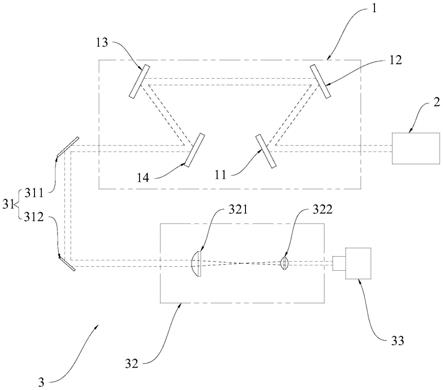
图1是本发明在线测量装置结构示意图(计算机处理模块未示出);
[0029]
图2是本发明光栅压缩器时空耦合畸变波前在线测量方法仿真测量结果;
[0030]
图3是本发明光栅压缩器时空耦合畸变波前在线测量方法实验测量结果。
具体实施方式
[0031]
为了使本领域的技术人员更好地理解本发明的技术方案,下面结合附图和具体实施方式对本发明作进一步的详细说明。
[0032]
如图1所示的一种光栅压缩器波前畸变在线测量装置,包括能产生中心波长可变的窄带准直宽激光光束并入射到待测光栅压缩器1中的可变波长光源模块2、能将待测光栅压缩器1出射的待测光束引出并对待测光束进行全口径光束波前测量的取样及波前测量模块3、能获得取样及波前测量模块3采集到的信息并通过计算分析得出待测光栅压缩器1的时空耦合波前畸变的计算机处理模块;所述计算机处理模块与取样及波前测量模块3之间通信连接。
[0033]
如图1所示,待测光栅压缩器1通常包括有四个光栅(第一面光栅11、第二面光栅12,第三面光栅13,第四面光栅14)。当然也有只用两面光栅(第一面光栅11、第二面光栅12)的光栅压缩器,这种光栅压缩器要在第一面光栅11和第二面光栅12的后面加一个反射镜,使得光线折返再次通过第一面光栅11和第二面光栅12。
[0034]
本发明中,可变波长光源模块2产生中心波长可变的窄带准直宽光束作为测量光,入射待测光栅压缩器1;测量光在待测光栅压缩器1的第一面光栅11上发生衍射,其1级衍射
光入射第二面光栅12,经过再次衍射后,其1级衍射光束传播方向与测量光入射11的方向平行,传播至与11与12对称的第三面光栅13及第四面光栅14后出射压缩器。不同波长的测量光除了经过第二面光栅12、第三面光栅13的不同位置以外,在整个测量光路其他位置均共路。出射测量光被取样及波前测量模块3取样后进行波前测量,并由计算机处理模块完成数据处理,得到待测时空耦合畸变波前。
[0035]
更具体的,所述取样及波前测量模块3包括用于反射待测光栅压缩器1出射的待测光束从而将待测光束引出的取样反射镜组31,所述取样反射镜组31的后方设有用于对待测光束进行缩束的缩束透镜组32,所述缩束透镜组32后方设有用于测量待测光束波前的波前传感器33;其中,所述缩束透镜组32将待测光束口径缩束至与波前传感器33测量的口径一致且消除了色差。待测光束出射待测光栅压缩器1之后进入取样及波前测量模块3,待测光束先被取样反射镜311及折转反射镜312反射,然后经过缩束透镜组32。缩束透镜组32将待测光束的光束口径缩束至与波前传感器33检测光束的尺寸匹配,即使得待测光束全口径均落入波前传感器33测量口之内,波前传感器33即可进行波前测量。缩束透镜组32由长焦距消色差透镜321及正焦距单透镜322组成,可以将待测波前位置成像至传感器像面。
[0036]
优选的,所述波前传感器可以使shark-hartmann波前传感器、剪切干涉仪等任意形式的高精度波前传感器。
[0037]
更具体的,所述计算机处理模块包括用于采集波前传感器33的波前测量信号图并进行处理的图像采集处理单元、用于分析多个不同波长的待测光束的波前信息从而得到待测光栅压缩器1时空耦合畸变波前数据的分析处理单元,所述图像采集处理单元与波前传感器33通信连接。即所述图像采集处理单元与波前传感器33相连,用于采集波前测量信号图并进行处理,得到某波长入射光的波前信息,所述数据分析及处理单元可以分析多个波长波前信息,从而得到压缩器时空耦合畸变波前(即待测光栅压缩器1的第二面光栅12和第三面光栅13衍射波前在光束衍射方向的波前变化分量)。
[0038]
更具体的,所述可变波长光源模块2包括振荡器、展宽器、放大器以及空间滤波器,所述空间滤波器包括能对光束扩束准直的倒置望远镜,所述展宽器的凸面镜上设有能移动位置从而实现波长选择的狭缝结构。即通过在展宽器中安装狭缝结构来实现窄带光取样,通过移动狭缝位置实现激光光束中心波长的调节。
[0039]
优选的,所述的可变波长光源模块2中的光学元器件、取样及波前测量模块3中的缩束透镜组32与波前传感器33均需进行消色差设计,以避免影响测量结果。
[0040]
一种光栅压缩器波前畸变在线测量方法,使用上述的测量装置,包括以下步骤:
[0041]
a,调整可变波长光源模块2,使用可变波长光源模块2产生中心波长为λ0的激光光束入射待测光栅压缩器1,待测光栅压缩器1出射待测光束;
[0042]
b,使用取样及波前测量模块3对步骤a中待测光栅压缩器1出射的待测光束进行波前测量,测量结果为w0(x,y),其中;x和y表示组成二维坐标系的两个方向(即各波长光衍射方向为x方向,对应的各光栅垂直衍射方向为y方向);
[0043]
c,调整可变波长光源模块2,使用可变波长光源模块2产生中心波长为λ1的激光光束入射待测光栅压缩器1,待测光栅压缩器1出射待测光束;其中,中心波长为λ1的激光光束相对于中心波长为λ0的激光光束的波长改变量满足:二者的激光光束在第二面光栅12及第三面光栅13之间传播时的横向平移量经缩束透镜组32缩束后等于取样及波前测量模块3中
的波前传感器33的最小分辨像元;
[0044]
d,使用取样及波前测量模块3对步骤c中待测光栅压缩器1出射的待测光束进行波前测量,测量结果为w1(x,y);
[0045]
e,使用计算机处理模块对步骤c和步骤d中测得的波前数据进行收集和分析计算,得出两次测量结果之差的累加值为w(x,y),其中
[0046][0047]
所述w(x,y)即为待测光栅压缩器1的时空耦合畸变波前。
[0048]
即步骤a-步骤b中,中心波长为λ0的测量光进入待测光栅压缩器1,并由取样及波前测量模块3进行波前测量,得到包含系统误差、待测光栅压缩器1的第一面光栅11至第四面光栅14衍射波前的测量结果w0(x,y),该结果优选进行10次测量取平均值以消除随机误差影响。即
[0049]
w0(x,y)=w
11&14
(x,y)+w
12&13
(x,y)+w
systemerror
(x,y)
[0050]
其中,w
11&14
(x,y)为第一面光栅11及第四面光栅14的衍射波前之和,不同波长的测量光在这两个光栅上光斑均完全重合,其引入的波前畸变对所有波长光一致,可通过自适应光学等手段进行补偿,不产生时空耦合畸变。w
12&13
(x,y)为第二面光栅12及第三面光栅13衍射波前之和,不同波长光在其上衍射时光斑位置分离,不同波长光会产生不同的波前畸变,进而使激光束引入时空耦合畸变效应,为待测量值,w
systemerror
(x,y)为测量光经过所有光学元件引入的累计波前误差。
[0051]
步骤c-步骤d中,将测量光中心波长改变为λ1,且波长改变量(波长为λ1的光束相对于波长为λ0的光束的波长改变量)需保证该两次测量光束(波长为λ0的光束和波长为λ1的光束)在第二面光栅12及第三面光栅13中传播时在衍射方向上的横向移动的距离经过缩束后恰好与波前传感器33的最小分辨单元相同,即保证这两次测量的光束的波长是相邻的。则此时测量结果可以表示为w1(x,y),该波长λ1优选进行10次测量取平均值以消除随机误差影响。则
[0052]
w1(x,y)=w
11&14
(x,y)+w
12&13
(x+1,y)+w
systemerror
(x,y)
[0053]
不同波长测量光在除第二面光栅12及第三面光栅13上的位置均重合,因此两次测量中的系统误差、第一面光栅11和第四面光栅14衍射波前完全一致。
[0054]
步骤e中,将上述两次测量结果相减,即可去除系统误差以及第一面光栅11和第四面光栅14衍射波前的影响,得到光束在第二面光栅12及第三面光栅13上的衍射波前沿横向为位移方向(这里取x方向)的梯度分布,即:
[0055]
w1(x,y)-w0(x,y)=w
12&13
(x+1,y)-w
12&13
(x,y)
[0056]
对该梯度值逐行进行累加,就可以恢复待测时空耦合畸变波前,即:
[0057][0058]
更具体的,对于所出射的光束经缩束透镜组32缩束后的口径超过波前传感器33能测量的最大光束口径的大型待测光栅压缩器1的测量,包括以下具体步骤:对该大型待测光
栅压缩器1进行若干次测量,每次测量步骤均包括步骤a至步骤e,且每次测量中步骤a使用的激光光束的中心波长的均不相同,最后将每次测量中步骤e得到的不同空间位置的计算的结果进行拼接,得到该大型待测光栅压缩器1全口径波前畸变。即对于大型光栅压缩器全口径时空耦合畸变波前测量,可通过调整测量光源的中心波长,改变其照射在光栅上测量光的位置,进行多次测量得到光栅压缩器不同位置波前的梯度分布,最终通过拼接得到全口径波前畸变。
[0059]
更具体的,步骤a和步骤b中调整可变波长光源模块2具体包括以下步骤:移动狭缝结构的位置使得可变波长光源模块2的波长改变。该发明可实现对已安装调试完毕的待测光栅压缩器1的时空耦合畸变波前(即待测光栅压缩器的第二面光栅12与第三面光栅13衍射波前在光束衍射方向的变化分量)的在线测量,测量中待测光栅压缩器1的排布方式与实际使用时完全一致,避免了因为入射角、元件加持方式、衍射级次等在测量与实际使用中不一致而引入的影响;测量过程可以除需要增加简单的诊断系统外,光源部分可以依托超高峰值功率激光装置振荡器及展宽器,不需要对光路进行任何调整,测量过程简便。另外,使用不同波长测量结果相减的测量方式,测量结果对光学系统系统误差及波前传感器固有误差不敏感,可以保证极高的测量精度及测量灵敏度。
[0060]
实施例一:
[0061]
现使用本发明的装置与方法对一光栅压缩器时空耦合畸变波前进行仿真测量。待测光栅压缩器设计中心波长为800nm,光栅线对数为1740线/mm,压缩器的入射角为53度,啁啾率40ps/nm。测量使用shark-hartmann波前传感器微透镜尺寸为0.15mm,分辨率为32
×
32,整体探测面积为4.8mm
×
4.8mm。使用缩束系统倍率为20倍,因此测量口径为96mm
×
96mm,测量中波前横向分辨率为3mm,对应波前改变量在中心波长附近为1.15nm。其中待测量的引起时空耦合畸变的第二面光栅12与第三面光栅13衍射波前如图2(a)所示,而第一面光栅11与第四面光栅14的累计衍射波前如图2(b),在测量中分别使用了800nm及798.85nm两个波长的测量光经过了该光栅压缩器,横向位移发生在x方向,最终在shark-hartmann波前传感器上得到的测量结果如图2(c)及(d)所示,测量光光谱宽度为1nm。将2次测量的波前结果作差,得到梯度分布结果,如图2(e)所示。接下来对梯度分布结果进行逐行沿x方向累加,即可得到测量结果如图2(f)。因为x初值为0,因此测量结果将会给每一行带来统一的偏差,为一个沿y方向整体误差分布,如图2(g)所示。但是该整体分布并不会带来时空耦合效应,因为其对不同波长影响是相同的,可以通过变形镜等自适应光学器件补偿,在忽略非时空耦合畸变波前情况下,测量得到的误差分布如图2(h)所示,其测量误差rms值仅为6.8nm,换算为波长单位小于λ/100,可以实现时空耦合畸变波前的高精度测量。另一方面,因为测量误差主要集中在高频成分,而高频成分对超高峰值功率激光聚焦效果影响较小,对测量得到高精度低频成分,足以进一步提高超高峰值功率激光的聚焦质量。
[0062]
实施例二:
[0063]
现使用本发明的装置与方法对一光栅压缩器时空耦合畸变波前进行实验测量,待测压缩器及测量装置的参数与仿真测量完全一致。在实验中,使用光纤光谱仪监控可变波长光源模块1产生的激光,光谱宽度控制为1.25nm,在804.6nm及805.75nm两个间隔1.15nm的波长进行了测量,测量结果如图3(a)及图3(b)所示。将2次测量的波前结果作差,得到梯度分布结果如图3(c)所示。接下来对梯度分布结果进行逐行沿x方向累加,即可得到测量结
果如图3(d)。在测量结果中成功恢复出了第二面光栅12和第三面光栅13造成的时空耦合畸变波前,从梯度分布及累加结果中,都可以看到在右侧有明显的光栅拼缝,而使用的光栅均为双拼光栅,验证了实验结果的正确性。
[0064]
显然,本发明的上述实施例仅仅是为了清楚说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1