一种仿人运动的力-电特性表征系统的制作方法
1.本发明涉及电子材料检测的领域技术,尤其涉及一种仿人运动的力
‑ꢀ
电特性表征系统。
背景技术:
2.21世纪的健康医疗产业以预防和数字化为基础,其核心是可穿戴/可植入健康监控技术。与人体兼容、满足人体运动和生理指标参数探测的高可靠性柔性、弹性电子材料与器件是制约可穿戴/可植入运动和健康监控技术发展的一个重要瓶颈,而其力-电特性的表征是评价柔性、弹性电子材料与器件指标和可靠性的关键。
3.目前,现有的商用的万能材料拉伸机,配合电学检测仪表,只能给出一维拉伸应变条件下柔性、弹性电子材料与器件的力-电性能表征,与人体真实的关节运动、呼吸运动等相比,尤其是考虑人体温度和出汗环境下,柔性、弹性电子材料与器件力-电性能会有偏差。虽然可以用人体运动直接测试柔性、弹性电子材料与器件的力-电性能,但在定量测试、测试精度、一致性、疲劳等参数方面无法进行保障。然而,目前仍缺乏仿人运动条件下的力-电特性表征系统,尤其是缺乏结合柔性、弹性电子材料与器件使用环境下的仿人运动的力-电特性表征系统。在仿人运动和模拟人体环境的条件下,研究柔性、弹性电子材料的力学和电学性能,对于揭示人体穿戴条件下制备技术与材料性能之间的关联规律,优化柔性、弹性电子材料与器件的设计至关重要,对于推动弹性电子新材料与器件从创新研究到应用落地的过程也具有十分重要的价值。
4.专利文献cn111537361a公开了一种利用齿环传动原理的服饰布料拉伸检测装置,包括底座,所述底座的内部固定连接有电机,所述电机的外部活动连接有螺纹杆,所述螺纹杆的外部啮合连接有转动杆,所述转动杆的内部滑动连接有滑杆,所述滑杆的外部滑动连接有横杆,所述横杆的内部滑动连接有定位杆,所述定位杆的外部套接有缓冲弹簧,所述横杆的外部固定有齿杆。该技术方案通过上述结构配合使用,完成对材料进行拉伸检测,但是该技术方案只能检测材料的极限值且没有考虑到实际使用时环境对材料的影响。
5.专利文献cn21090739u公开了一种电子材料检测装置,包括检测设备本体,所述检测设备本体的下方设有第一支撑板,所述检测设备本体与第一支撑板通过弹性组件连接,所述第一支撑板的下方设有底座,所述底座的顶部设有两个螺纹管,所述螺纹管与底座通过固定组件连接,所述螺纹管内设有丝杠,所述丝杠的顶端延伸至螺纹管的外部,且所述丝杠的顶端与第一支撑板的底部通过轴承连接,所述底座的底部开设有两个通孔,且所述丝杠的底端贯穿通孔,所述底座的底部固定连接有若干支撑腿。该技术方案通过丝杠可以实现定量检测材料的拉伸强度,但是该技术方案只能检测单一方向拉伸强度,且没有考虑到环境因素对材料拉伸强度的影响。
技术实现要素:
6.为了解决上述问题,本发明提供了一种仿人运动的力-电特性表征系统,该系统能
够模拟人体实际环境因素来检测电子材料的性能,通过力
‑ꢀ
电特性表征的方式来评估电子材料的可靠性。
7.一种仿人运动的力-电特性表征系统,包括检测箱、与检测箱配套使用的测试系统;所述检测箱内悬挂有仿人工腿机构与仿人工胸腔机构,检测箱外还设有用于监控人工腿机构与仿人工胸腔机构工作情况的控制主机;
8.所述仿人工腿机构包括一端与检测箱内顶部固定连接的机械腿、驱动机械腿摆动的人工关节以及包覆在机械腿外侧的仿生腿部皮肤;
9.所述仿人工胸腔机构包括做扩张、收缩运动的胸腔模具,以及包覆在胸腔模具外侧的仿生胸腔皮肤;
10.测试时,将待测的电子材料分别固定在仿生腿部皮肤或/和仿生胸腔皮肤上。
11.优选的,所述仿生腿部皮肤或仿生胸腔皮肤包括硅胶基底、铺设在硅胶基底上的加热电路以及排汗模拟机构,所述硅胶基底贴附在机械腿或胸腔模具的外侧;其中加热电路用于模拟人体皮肤的温度,排汗模拟机构用于模仿人体排汗。
12.优选的,所述加热电路包括s型铺设在硅胶基底上用于加热的柔性导电金属与温度传感器,所述温度传感器用于将硅胶基底的实时温度反馈至控制主机,通过调节柔性导电金属两端的电压,控制仿生皮肤的表面温度。
13.优选的,所述测试系统包括:
14.电学测试模块,用于检测电子材料的电阻、电容或电感中一种或多种的变化,并输出至控制主机;
15.动作控制模块,用于控制人工关节转动角度与转动速度;
16.仿生皮肤控制模块,用于控制仿生腿部皮肤与仿生胸腔皮肤的加热电路与排汗模拟机构工作;
17.力-温度-湿度检测模块,用于记录仿人工腿机构与仿人工胸腔机构工作时的参数,并输出至控制主机。
18.优选的,所述排汗模拟机构包括表面带有微流道的高分子模具与配套使用的蠕动泵,所述蠕动泵通过仿生皮肤控制模块控制,为高分子模具定量提供生理盐水,当生理盐水通过蠕动泵进入高分子模具后,会沿着微流道缓慢渗出,模拟人体皮肤出汗时的状态。
19.优选的,所述检测箱下部设有支撑箱,所述支撑箱内设有为胸腔模具注入、抽出空气的气泵以及为气泵提供动力的伺服电机;所述伺服电机通过动作控制模块控制,根据胸腔模具扩张、收缩运动的速度需求调整伺服电机的输出转速。
20.优选的,所述胸腔模具上带有若干个用于记录胸腔模具体积变化的位置传感器:测试前,通过胸腔模具的体积变化与伺服电机的输出转速计算出两者之间的非线性关系,从而通过调节伺服电机来控制胸腔模具的体积变化;在测试中,用于监控胸腔模具的体积变化情况,避免体积过大而发生事故。
21.优选的,所述测试系统具有三种测试模式:
22.第一种类型:静态模式,即在没有外界条件影响下,使电子材料随着人工关节与胸腔模具进行缓慢运动测试,从而获得电子材料的正常对比值;
23.第二种类型:动态模式,即预设人工关节与胸腔模具的固定运动参数,使电子材料在同一种运动环境下进行重复测试,从而获得电子材料的使用寿命;
24.第三种类型:情境模式,建立神经网络学习模型,学习人体运动与温度、出汗之间的非线性关系,使电子材料在仿真人体环境下进行运动测试,从而获得不同因素对电子材料的影响情况数据。
25.与现有技术相比,本发明的有益效果:通过仿人运动装置,并设计使用仿生胸腔皮肤与仿生腿部皮肤对电子材料进行模拟测试,获得更加具有信服力的可靠性评估数据;更进一步的,为测试系统设置了三种模式,从而满足不同需要的测试要求。
附图说明
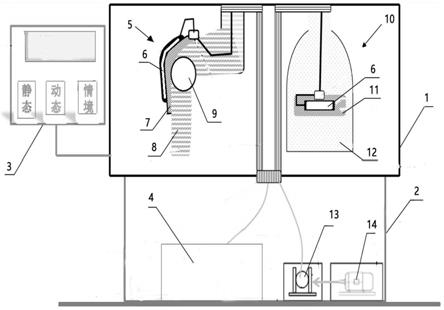
26.图1为本发明提供的检测箱与支撑箱的结构示意图;
27.图2为本发明提供的系统结构示意图;
28.图中,1、检测箱;2、支撑箱;3、控制主机;4、配件密封柜;5、仿人工腿机构;6、电子材料;7、仿生腿部皮肤;8、机械腿;9、人工关节; 10、仿人工胸腔机构;11、仿生胸腔皮肤;12、胸腔模具;13、气泵;14、伺服电机。
具体实施方式
29.如图1所示,一种仿人运动的力-电特性表征系统,包括检测箱1、与检测箱2配套使用的测试系统,用于承载检测箱1的支撑箱2;检测箱1 内悬挂有仿人工腿机构5与仿人工胸腔机构10,检测箱1外还设有用于监控人工腿机构5与仿人工胸腔机构10工作情况的控制主机3;
30.仿人工腿机构5包括一端与检测箱1内顶部固定连接的机械腿8,机械腿8的固定部与转动部之间设有人工关节9,其中人工关节9包括提供动力的力矩电机与配套使用的伺服控制器,此外还配有位置传感器以及力矩传感器,从而实现控制机械腿8的转动角度与转速,在机械腿8外侧包覆仿生腿部皮肤7;
31.所述仿人工胸腔机构10包括做扩张、收缩运动的胸腔模具12,布置在支撑箱2内为胸腔模具12注入、抽出空气的气泵13与为气泵13提供动力的伺服电机14,通过控制伺服电机14的输出转速来调节胸腔模具12 扩张、收缩运动的速度,同时胸腔模具12还贴附有若干个位置传感器,用于记录胸腔模具12的体积变化情况:
32.在测试前,通过记录的数据计算出胸腔模具12的体积变化与伺服电机14的输出转速之间的非线性关系,从而通过调节伺服电机14控制胸腔模具12的体积变化,更进一步,通过神经网络学习模型完成模拟不同运动状态下的人体胸腔体积变化;
33.在测试中,监控胸腔模具12的体积变化情况,避免体积过大而发生事故;
34.此外胸腔模具12外侧包覆有仿生胸腔皮肤11。
35.测试时,将待测的电子材料6分别固定在仿生腿部皮肤7或/和仿生胸腔皮肤11上。
36.其中仿生腿部皮肤7或仿生胸腔皮肤11包括硅胶基底、铺设在硅胶基底上的加热电路以及排汗模拟机构,硅胶基底贴附在机械腿8或胸腔模具12的外侧。
37.加热电路包括s型涂覆在硅胶基底的液态金属与温度传感器,温度传感器用于将硅胶基底的实时温度反馈至控制主机,通过调节液态金属两端的电压,控制仿生皮肤的表面温度,其中制备方法为:
38.s1制备液态金属:根据原材料质量百分比来计,镓、铟与锡的各组分质量比为
62.5:21.5:16,先将镓原料加入聚四氟乙烯坩埚中,在50~100℃的鼓风干燥箱内加热熔化,再将其他金属原料加入熔化后的镓中,以石墨棒搅拌溶解,且搅拌温度保持在50~100℃;冷却到室温后除去表面氧化膜,获得镓基液态合金;
39.s2选取图案为s型的掩膜版,通过刮板将液态金属均匀的涂刷在硅胶基底上;
40.s3在液态金属两端接入可浸润的铜电极片,涂覆一层硅胶溶液后放置在鼓风干燥箱中60~120℃固化2小时后进行封装,获得带有加热电路的硅胶基底。
41.在支撑箱2内还设有配件密封柜4,将电子元配件以及不防水的设备布置在配件密封柜14中,避免检测时漏水导致损坏设备。
42.如图2所示,测试系统根据功能分为:
43.电学测试模块,用于检测电子材料的电阻、电容或电感中一种或多种的变化,并输出至控制主机,根据电阻、电容或电感的物理量变化来体现电子材料的性能变化;
44.动作控制模块,用于控制人工关节9转动角度与转动速度;
45.仿生皮肤控制模块,用于控制仿生腿部皮肤7与仿生胸腔皮肤11的加热电路与排汗模拟机构工作;
46.力-温度-湿度检测模块,用于记录仿人工腿机构5与仿人工胸腔机构 10工作时的参数,并输出至控制主机3。
47.排汗模拟机构包括表面带有微流道的高分子模具与配套使用的蠕动泵,蠕动泵通过仿生皮肤控制模块控制,为高分子模具定量提供生理盐水,当生理盐水通过蠕动泵进入高分子模具后,会沿着微流道缓慢渗出,模拟人体皮肤出汗时的状态。
48.支撑箱内设有为胸腔模具注入、抽出空气的气泵以及为气泵提供动力的伺服电机;伺服电机通过动作控制模块控制,根据胸腔模具扩张、收缩运动的速度需求调整伺服电机的输出转速。
49.测试系统设有三种测试模式:
50.第一种类型:静态模式,即在没有外界条件影响下,使电子材料6随着人工关节9与胸腔模具12进行缓慢运动测试,从而获得电子材料6的正常对比值;
51.第二种类型:动态模式,即预设人工关节9与胸腔模具12的固定运动参数,使电子材料6在同一种运动环境下进行重复测试,从而获得电子材料6的使用寿命;
52.第三种类型:情境模式,建立神经网络学习模型,学习人体运动与温度、出汗之间的非线性关系,使电子材料6在仿真人体环境下进行运动测试,从而获得不同因素对电子材料的影响情况。
53.具体使用过程:测试人员将待测的电子材料分别固定在仿生腿皮肤与仿生胸腔皮肤上后,通过控制主机选择静态模式,获得电子材料的正常对比值;如果需要测试电子材料的使用寿命,可以选用动态模式进行测试,当电子材料的参数低于正常对比值时,系统会记录已测试的次数并反馈至控制主机中;如果需要针对人体环境下的测试,可以选用情境模式,通过控制主机提前设定运动类型与运动强度,通过神经网络学习模型仿真出运动时的体温升高以及出汗情况,当电子材料的参数出现异常时,系统会记录该次测试中温度、湿度以及运动类型,并反馈至控制主机便于测试人员后续的分析。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1