探测模组及激光测距系统的制作方法
1.本技术涉及激光测量领域,特别涉及一种探测模组及激光测距系统。
背景技术:
2.在激光测量领域,激光测距系统可以采用调频连续波(frequency modulated continuous wave,fmcw)技术,来测量目标物与激光测距系统的距离,以及该目标物相对于激光测距系统的运动速度。
3.相关技术中,激光测距系统一般包括激光光源和多个探测器。其中,激光光源发射本振光,该本振光被目标物发射后会产生反射光。该多个探测器用于基于探测到的本振光和反射光生成探测电信号,该探测电信号可以用于确定目标物与激光测距系统的距离,以及该目标物的移动速度。
4.为了提高激光测距系统的探测分辨率,需要增加探测器的数量,进而导致激光测距系统的重量和结构复杂度较高。
技术实现要素:
5.本技术提供了一种探测模组及激光测距系统,可以解决相关技术中激光测距系统的重量和结构复杂度较高的问题。所述技术方案如下:
6.一方面,提供了一种探测模组,所述探测模组包括:
7.沿目标方向排列的多个探测组件,所述多个探测组件包括位于第一区域的多个第一探测组件和位于第二区域的多个第二探测组件,其中每相邻两个所述第一探测组件之间的间距位于第一间距范围,每相邻两个所述第二探测组件之间的间距位于第二间距范围,所述第一间距范围的下限大于所述第二间距范围的上限;
8.每个所述探测组件用于对光源发出的本振光,以及所述本振光被目标物反射后的反射光进行探测,以生成探测电信号,所述探测电信号用于指示所述目标物与所述探测模组之间的距离,和/或,所述目标物的移动速度。
9.可选地,所述第一区域包括两个子区域,每个所述子区域中均设置有多个所述第一探测组件,且所述第二区域位于两个所述子区域之间。
10.可选地,所述多个第二探测组件的数量大于每个所述子区域中的多个第一探测组件的数量。
11.可选地,所述多个第一探测组件等间距排布,所述多个第二探测组件等间距排布。
12.可选地,每个所述探测组件包括光栅耦合器和平衡探测器;
13.所述光栅耦合器用于将所述反射光耦合至所述平衡探测器;
14.所述平衡探测器用于对所述反射光和所述本振光的干涉光进行光电转换,生成探测电流,以作为所述探测电信号。
15.可选地,每个所述探测组件还包括跨阻放大器,所述跨阻放大器用于将所述探测电流转换为探测电压,以作为所述探测电信号。
16.可选地,每个所述探测组件还包括滤波器,所述滤波器与所述跨阻放大器连接,用于对所述跨阻放大器输出的探测电压进行滤波。
17.可选地,每个所述探测组件还包括光耦合器,所述光耦合器用于对所述本振光和所述反射光进行合光,将合光后得到的干涉光分为两束后传输至所述平衡探测器。
18.可选地,所述光栅耦合器,所述平衡探测器,所述跨阻放大器以及所述光耦合器均集成在同一个芯片中。
19.另一方面,提供了一种激光测距系统,所述系统包括:光源,如上述方面所述的探测模组,以及信号处理组件;
20.其中,所述光源用于发射本振光;
21.所述信号处理组件用于对所述探测模组输出的探测电信号进行处理,以确定目标物与所述探测模组之间的距离,和/或,所述目标物的移动速度。
22.本技术提供的技术方案带来的有益效果至少包括:
23.本技术提供了一种探测模组及激光测距系统,该探测模组包括位于第一区域的多个第一探测组件和位于第二区域的多个第二探测组件。由于每相邻两个第一探测组件之间的间距,大于每相邻两个第二探测组件之间的间距,因此可以确保该第二区域的探测分辨率较高。相应的,通过使该第二区域的各个第二探测组件的探测区域覆盖探测对象出现概率较高的区域,可以实现对探测对象的精细探测。通过使第一区域的各个第一探测组件的探测区域覆盖探测对象出现概率较低的区域,可以确保该探测模组具有较大的探测范围。
24.基于上述分析可知,本技术提供的方案无需大量的探测组件,即可在较大的探测范围内,以较高的探测分辨率对探测对象进行可靠探测,从而有效避免了增加探测模组的重量和结构复杂度,降低了探测模组的成本。
附图说明
25.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
26.图1是本技术实施例提供的一种激光测距系统的结构示意图;
27.图2是本技术实施例提供的一种本振光与探测光的频率曲线示意图;
28.图3是本技术实施例提供的一种探测模组的结构示意图;
29.图4是本技术实施例提供的一种探测组件的结构示意图;
30.图5是本技术实施例提供的一种探测模组的局部结构示意图;
31.图6是本技术实施例提供的另一种探测组件的结构示意图;
32.图7是本技术实施例提供的一种对干涉光进行光电转换的示意图;
33.图8是本技术实施例提供的一种探测模组中的芯片的结构示意图。
具体实施方式
34.为使本技术的目的、技术方案和优点更加清楚,下面将结合附图对本技术实施方式作进一步地详细描述。
35.图1是本技术实施例提供的一种激光测距系统的结构示意图。参见图1,该系统包括:光源10,探测模组20,以及信号处理组件30。
36.其中,该光源10用于发射本振光。该探测模组20用于对光源10发出的本振光,以及该本振光被目标物反射后的反射光进行探测,以生成探测电信号。该信号处理组件30用于对探测模组20输出的探测电信号进行处理,以确定目标物与该探测模组20之间的距离,和/或,该目标物的移动速度。其中,该目标物的移动速度可以是目标物相对于探测模组20的移动速度。
37.在本技术实施例中,该光源10可以为激光器。该光源10发射出的本振光(也可以称为发射光)可以为调频连续波。例如,该本振光可以是调频方式为三角波的连续光信号。该光源10发出的本振光中,一部分可以通过光学器件m1和m2传输至探测模组20,另一部分可以通过光学器件m1传输至目标物。传输至目标物的本振光被该目标物反射后形成的反射光(也可以称为回波信号)能够传输至探测模组20。其中,该反射光相比于本振光,存在一定的频差。该光学器件m1可以为分光器。该分光器可以将光源10发出的本振光中的一部分透射至目标物,并将另一部分反射至光学器件m2。例如,该分光器可以透射99%的本振光,并反射1%的本振光。光学器件m2可以为反射器。
38.图2是本技术实施例提供的本振光与反射光的扫频曲线图。其中,该曲线图的纵轴表示频率(ν),该曲线图的横轴表示时间(t)。实线为本振光的频率曲线,虚线为反射光的频率曲线。参考图2可知,被目标物反射后的反射光的频率曲线与本振光的频率曲线相似,但该反射光的与本振光存在一定的频差。
39.探测模组20可以对探测到的本振光和反射光进行混频处理,产生光学拍,即拍信号。该拍信号的频率即为本振光与反射光的频差。探测模组20进而可以对该拍信号进行光电转换,从而生成探测电信号。
40.可选地,该信号处理组件30可以包括模数转换器(analog-to-digital converter,adc)和数字信号处理电路。其中,该模数转换器用于对探测模组20输出的探测电信号进行模数转换,以将该探测电信号(即模拟信号)转换为数字信号。之后,该模数转换模块可以将该数字信号传输至数字信号处理电路进行进一步的处理。
41.其中,该数字信号处理电路可以是专用集成电路(application specific integrated circuit,asic)或者可编程逻辑器件(programmable logic device,pld)。该pld可以是复杂可编程逻辑器件(complex programmable logic device,cpld),现场可编程逻辑门阵列(field programmable gate array,fpga)或通用阵列逻辑(generic array logic,gal)等。
42.可选地,本技术实施例提供的激光测距系统可以用于探测车辆的移动速度和/或车距,即该目标物可以为车辆。相应的,该激光测距系统可以部署在车辆中(例如车顶),或者部署在路侧设备中。
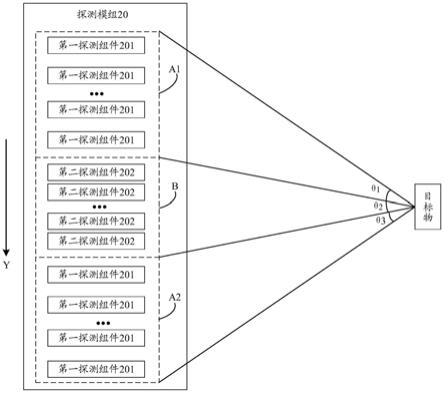
43.图3是本技术实施例提供的一种探测模组的结构示意图,参见图3,该探测模组20包括:沿目标方向y排列的多个探测组件。该多个探测组件包括位于第一区域的多个第一探测组件201和位于第二区域b的多个第二探测组件202。
44.其中,该目标方向y可以是垂直于水平面的方向,也称为竖直方向。该探测模组20中的每个探测组件用于对光源10发出的本振光,以及该本振光被目标物反射后的反射光进
行探测,以生成探测电信号。该探测电信号用于指示该目标物与探测模组之间的距离,和/或,该目标物的移动速度。
45.在本技术实施例中,每相邻两个第一探测组件之间的间距位于第一间距范围,每相邻两个第二探测组件之间的间距位于第二间距范围,该第一间距范围的下限大于该第二间距范围的上限。也即是,第二区域b中设置的第二探测组件202之间的间距较小,第一区域中设置的第一探测组件201之间的间距较大。或者,可以理解为:第二区域b中设置的探测组件的密度大于第一区域中设置的探测组件的密度。
46.可以理解的是,某个区域内沿目标方向y排列的探测组件的密度越高,即该区域内设置的探测组件的数量越多,该区域的探测分辨率越高。因此,在本技术实施例中,该第二区域b的探测分辨率高于第一区域的探测分辨率。
47.还可以理解的是,该第二区域b中的多个第二探测组件202所能够探测到的区域可以是探测对象出现概率较高的区域,也可以称为感兴趣区(region of interest,roi)。该第一区域可以是探测对象出现概率较低的区域。
48.示例的,假设探测模组部署在车辆上,且探测对象为其他车辆,则该第二区域b中的多个第二探测组件202所能够探测到的区域可以是该车辆正前方或正后方的区域。该第一区域a中的多个第二探测组件202所能够探测到的区域可以是该车辆所行驶的地面区域或车辆上方的天空区域。
49.综上所述,本技术实施例提供了一种探测模组。该探测模组包括位于第一区域的多个第一探测组件和位于第二区域的多个第二探测组件。由于每相邻两个第一探测组件之间的间距,大于每相邻两个第二探测组件之间的间距,因此可以确保该第二区域的探测分辨率较高。相应的,通过使该第二区域的各个第二探测组件的探测区域覆盖探测对象出现概率较高的区域,可以实现对探测对象的精细探测。通过使第一区域的各个第一探测组件的探测区域覆盖探测对象出现概率较低的区域,可以确保该探测模组具有较大的探测范围。
50.基于上述分析可知,本技术实施例提供的探测模组无需大量的探测组件,即可在较大的探测范围内,以较高的探测分辨率对探测对象进行可靠探测,从而有效避免了增加探测模组的重量和结构复杂度,降低了探测模组的成本。
51.在本技术实施例中,探测模组20中任一区域的探测分辨率r可以表示为:r=θ/n。其中,θ为探测模组20中某一区域在目标方向y的视场角θ,n为该区域所包括的探测组件的数量。可以理解的是,参考图2,某一区域在目标方向y的视场角θ的顶点可以为目标物反射面上的任意一点,视场角θ的两条边线为该顶点与该区域沿目标方向y排布的两个边界点之间的连线。
52.示例的,参见图2,假设探测模组中的第一区域包括子区域a1和a2。若子区域a1的视场角为θ1和子区域a2的视场角θ3均为14.4
°
,第二区域b的视场角为θ2为3.2
°
,且子区域a1和第子区域a2中均排列有16个第一探测组件201,第二区域b中排列有32个第二探测组件202。则子区域a1的探测分辨率r1=0.9
°
,子区域a2的探测分辨率r3=0.9
°
,第二区域b的探测分辨率r2=0.1
°
。
53.可选地,参考图3,该第一区域可以包括两个子区域a1和a2,其中每个子区域均设置有多个第一探测组件201。并且,该第二区域b可以位于该两个子区域a1和a2之间。
54.由于位于探测模组20的中间区域的探测组件所能探测到的区域通常为探测对象出现概率较高的区域时,因此可以将该中间区域,即第二区域b中的探测组件的间距设置的较小,从而提高该第二区域b的探测分辨率。并且,可以将探测对象出现概率较低的区域,即子区域a1和a2中的探测组件的间距设置的较大,从而减少子区域a1和a2中所需设置的探测组件的数量,进而有效降低探测模组的重量、结构复杂度和成本。
55.可选地,该第二区域b中的多个第二探测组件202的数量可以大于第一区域的每个子区域a1或a2中第一探测组件201的数量。
56.由于第二区域b中设置的第二探测组件202之间的间距较小,第一区域中设置的第一探测组件201之间的间距较大。因此,该第二区域b能够排列较多数量的第二探测组件202。相应的,该第二区域b的探测分辨率高于第一区域的探测分辨率。
57.示例的,该第二区域b中设置的多个第二探测组件202的数量可以为32,第一区域中每个子区域中设置的多个第一探测组件201的数量可以为16。
58.可选地,该多个第一探测组件201可以等间距排布,该多个第二探测组件202也可以等间距排布。由于反射光入射至探测模组20的方向是固定的,因此,通过使各个区域的探测组件等间距排布,可以确保探测模组20中的各个光栅耦合器210能够高效地接收到反射光,进而降低探测电信号的处理难度。并且,通过使各个区域的探测组件等间距排布,还可以简化探测模组20的制造工艺。
59.当然,该多个第一探测组件201也可以不等间距排布,该多个第二探测组件202也可以不等间距排布。例如,对于第一区域包括两个子区域a1和a2的场景,每个子区域中的多个第一探测组件201可以等间距排布,且不同子区域中第一探测组件201之间的间距可以不同,但均位于该第一间距范围内。
60.可以理解的是,该第二区域b也可以包括多个子区域,其中每个子区域包括多个等间距排布的第二探测组件202,且不同子区域中第二探测组件202之间的间距可以不同,但均位于该第二间距范围内。
61.由于第一区域或第二区域b中不同子区域中探测组件之间的间距可以不同,因此不同子区域的探测分辨率也可不同。基于探测模组20所应用的实际场景,调整探测模组20中各个子区域中探测组件的间距,从而灵活配置探测模组20中各个区域的探测分辨率,进而实现对探测对象的灵活探测。
62.本技术实施例对该第一区域所包括的子区域个数,以及第二区域b所包括的子区域的个数和设置位置不做限定。也即是,可以根据激光测距系统的应用场景的需求,对该第一区域包括的多个子区域的个数和位置,以及该第二区域b包括的多个子区域的个数和位置进行灵活调整。
63.例如,第二区域b可以包括两个子区域b1和b2。该两个子区域b1和b2可以位于第一区域的两个子区域a1和a2之间。或者,该第一区域的两个子区域a1和a2可以均位于第二区域b的两个子区域之间。又或者,该两个子区域b1和b2,与第一区域的两个子区域a1和a2可以交错排布。
64.可以理解的是,本技术实施例提供的探测模组中的各个探测组件的结构均相同。图4是本技术实施例提供的另一种探测组件的结构示意图,图5是本技术实施例提供的一种探测模组20的局部结构示意图。参见图4和图5,该探测模组20中的每个探测组件均可以包
括:光栅耦合器210和平衡探测器220。
65.其中,该光栅耦合器210用于将反射光耦合至平衡探测器220。该平衡探测器220用于对反射光和本振光的干涉光进行光电转换,生成探测电流,以作为探测电信号。
66.在本技术实施例中,该光栅耦合器210可以接收被目标物反射后形成的反射光,并将接收到的反射光通过光波导耦合至平衡探测器220。可选地,该光栅耦合器210可以为切趾型光栅耦合器,该切趾型光栅耦合器可以是对探测模组20所在的基板进行刻蚀形成的。
67.图6是本技术实施例提供的另一种探测组件的结构示意图。参见图6,该探测组件中的平衡探测器220可以包括两个光电二极管d1和d2。传输至平衡探测器220的干涉光能够使得该两个光电二极管d1和d2呈导通状态,并产生探测电流,即探测电信号。
68.继续参考图4、图5和图6,该探测组件还可以包括跨阻放大器(trans-impedance amplifier,tia)230。该跨阻放大器230用于将探测电流转换为探测电压,以作为探测电信号。示例的,如图6所示,该跨阻放大器230可以包括放大器a1和第一电阻r1。
69.可以理解的是,经由光学器件m1和m2传输至探测模组20的本振光的功率只是光源10发射的本振光的功率的一小部分(例如1/100),并且光源10发射的本振光经由光学器件m1传输至目标物,又被该目标物反射后所形成的反射光,在传输和反射过程中会损失较多能量。因此,平衡探测器220接收到的反射光与本振光所形成的干涉光也比较微弱。相应的,平衡探测器220输出的探测电流也比较小(一般为微安量级),不便于后续的信号处理。
70.而在本技术实施例中,在平衡探测器220后设置跨阻放大器230,可以将电流强度较小的探测电流转换为易于处理的探测电压(一般为伏特量级)。之后,跨阻放大器230可以将该探测电压作为探测电信号传输至信号处理组件30,该信号处理组件30进而可以基于该电压形式的探测电信号,更为准确地确定出目标物与探测模组20之间的距离,和/或,该目标物的移动速度。
71.可选地,如图4和图6所示,每个探测组件还可以包括滤波器240,该滤波器240与跨阻放大器230连接,用于对跨阻放大器230输出的探测电压进行滤波。
72.可以理解的是,跨阻放大器230输出的探测电信号中夹杂有噪声信号。该滤波器240可以对该探测电信号进行滤波(也可以称为预处理),并将滤波后的探测电信号通过探测模组20的输出接口,传输至信号处理组件30。由于该滤波器240能够滤除探测电信号中的噪声信号,因此可以确保传输至信号处理组件30的探测电信号的质量较好。
73.可选地,该滤波器240可以为rc滤波器。例如,参见图5,该滤波器240可以包括并联的电容c和第二电阻r2。
74.继续参考图4和图6,探测模组20中的每个探测组件还可以包括光耦合器250,该光耦合器250用于对本振光和反射光进行合光,并将合光后得到的干涉光分为两束后传输至平衡探测器220。例如,该两束干涉光可以分别传输至平衡探测器220的两个光电二极管d1和d2。
75.示例的,如图5所示,光源10发射的本振光经过光学器件m2反射后,可以被分光为多路。其中,每一路本振光能够通过硅基单模波导传输至一个探测组件中的光耦合器250。并且,每个探测组件中的光栅耦合器210接收到反射光后,能够将该反射光通过锥形波导耦合入硅基单模波导,进而再由硅基单模波导传输至光耦合器250。
76.如图6和图7所示,该本振光和反射光在光耦合器250中能够发生干涉并产生拍信
号,光耦合器250进而可以按照一定的分光比将该干涉光分为两束。其中,该光耦合器250的分光比可以为1:1(或者表示为50:50)。也即是,该光耦合器250可以将该干涉光均分为强度相等的两束干涉光,并将该两束干涉光传输至平衡探测器220进行光电转换。
77.参考图7还可以看出,平衡探测器220对两束干涉光分别进行光电转换,从而输出两路存在一定频差的电流信号。相应的,在光电转换过程中,平衡探测器220能够有效抑制输出的探测电流信号中的共模噪声,提升该探测电流信号的信噪比。进一步的,能够提升激光测距系统的探测灵敏度,并提升激光测距系统的极限探测距离。
78.图8是本技术实施例提供的一种探测模组中的芯片的结构示意图,如图8所示,在探测模组20中,每个探测单元的所包括的光栅耦合器210,平衡探测器220,跨阻放大器230以及光耦合器250均可以集成在同一个芯片中。该芯片也可以称为探测芯片。
79.可以理解的是,将探测模组20中每个探测组件中所包括的各个器件集成在同一芯片上,能够有效缩短各个器件之间的连接线的长度,从而使得该多个器件的整体覆盖面积较小。并且,将该多个器件集成在同一芯片上时,能够有效抑制该多个器件内部的电感、电容以及连接线引脚在高频情况下表现出来的电容/电感特性(即寄生电容/电感),从而确保探测电信号在探测模组20传输过程中的完整性,使得探测模组20传输至信号处理组件30的探测电信号的质量较好。
80.在探测模组20的制作工艺中,将探测模组20中各个探测组件所包括的器件进行集成在同一探测芯片上后,可以将探测组件探测模组20焊接在印制电路板(printed circuit board,pcb)上。之后,可以将该探测模组20与信号处理组件30进行连接。
81.可选地,在本技术实施例中,探测模组20中可以包括一个或多个探测线阵,每个探测线阵均包括沿该目标方向y排列的多个探测组件。其中,每个探测线阵所包括的探测组件的个数也可以称为该探测线阵的线数。
82.示例的,以图3为例,假设探测模组20中包括一个探测线阵,且该探测线阵包括沿目标方向y排列的64个探测组件,因此该探测模组20也可以称为1
×
64线的探测模组。
83.可以理解的是,若探测模组20包括多个探测线阵,则该多个探测线阵可以沿垂直于目标方向y的方向(例如水平方向)排布。并且,各个探测线阵包括的探测组件的个数可以相同。相应的,该探测模组20包括的多个探测组件可以在平行于目标方向y的平面内呈阵列排布。
84.示例的,假设探测模组20包括n个探测线阵,每个探测线阵包括p个探测组件,则该探测模组20包括的n
×
p个探测组件可以形成p行n列的面阵。其中,n和p均为大于1的整数。例如,n=p=4。
85.综上所述,本技术实施例提供了一种探测模组。该探测模组包括位于第一区域的多个第一探测组件和位于第二区域的多个第二探测组件。由于每相邻两个第一探测组件之间的间距,大于每相邻两个第二探测组件之间的间距,因此可以确保该第二区域的探测分辨率较高。相应的,通过使该第二区域的各个第二探测组件的探测区域覆盖探测对象出现概率较高的区域,可以实现对探测对象的精细探测。
86.也即是,本技术实施例提供的探测模组无需大量的探测组件,即可以较高的探测分辨率对探测对象进行探测,从而有效避免了增加探测模组的重量和结构复杂度,降低了探测模组的成本。并且,探测模组中的栅耦合器,平衡探测器,跨阻放大器以及光耦合器均
集成在同一个芯片,可以有效降低激光测距系统的尺寸,并确保信号处理组件接收到的探测电信号的质量较好。
87.可以理解的是,本技术中术语“多个”的含义是指两个或两个以上。
88.在本文中提及的“和/或”,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。字符“/”一般表示前后关联对象是一种“或”的关系。
89.本领域普通技术人员可以理解实现上述实施例的全部或部分步骤可以通过硬件来完成,也可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,上述提到的存储介质可以是只读存储器,磁盘或光盘等。
90.以上仅为本技术的示例性实施例,并不用以限制本技术,凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1