一种基于X光成像的全自无障碍通行的植物根系拍照装置的制作方法
一种基于x光成像的全自无障碍通行的植物根系拍照装置
技术领域
1.本实用新型涉及农业自动化监测相关技术领域,尤其是指一种基于x光成像的全自无障碍通行的植物根系拍照装置。
背景技术:
2.在智慧农业大棚里,涉及各类测量与监测技术与方法的需求和应用。有一类测量和监测比较特殊,也就是对埋在土里的植物根系(包括根系、块茎类)的检测。传统的检测方式为人工将土壤破开,观察根系的生长情况。显然在高度智能化的工厂,这类利用人工,同时具有破坏性的观测方式,并不适合大规模使用。因此需要一种自动化的装置,同时不产生破坏性,影响植物生长的检测方式。
3.传统的视觉检测方式困难在于,土壤在一般成像光谱波段都是不透明存在,因此在有土壤栽培环境下,传统的各类视觉检测方法是无效的。需要一种能穿透土层,对生物组织进行高精度成像的方案才能解决这类问题。
4.显然,针对室内智慧温棚,这类集成度高,环境好的场所,采用x光光谱成像,能很好的解决土壤内物体成像检测的工作。
5.传统的x光测量装置被大规模应用在医疗,安检等场合。这类固定位置拍摄,移动不便利的设备,并不适合与各类植物温棚。因此,需要设计一种适合在智能植物温棚使用的,能自动化运行,能灵活运动,智能识别的x光成像设备。
6.特别的,由于x光成像设备的特殊性,需要自带x光光源和x光感光成像装置,并且,两个装置需要分别处于被测物体的两端。当设备设计为一体化的装置时,需要建立跨越成像物体的结构连接,很容易与被拍摄物体发生结构干涉。
技术实现要素:
7.本实用新型是为了克服现有技术中对智慧温棚中栽培的植物需要挖开土壤才能对植物根系进行检测的不足,提供了一种对智慧温棚中栽培的植物无需挖开土壤就能对植物根系进行检测的基于x光成像的全自无障碍通行的植物根系拍照装置。
8.为了实现上述目的,本实用新型采用以下技术方案:
9.一种基于x光成像的全自无障碍通行的植物根系拍照装置,它包括两台自动导引车,两台自动导引车之间形成间隙,所述自动导引车内设有单片机,其中一台自动导引车的一侧远离另一台自动导引车,且其相对应的另一侧靠近另一台自动导引车且设有3d成像仪和x光感光成像仪,所述3d成像仪和x光感光成像仪均与自动导引车可拆卸连接,另一台自动导引车上设有与3d成像仪相对应的辅助3d测量定位仪和与x光感光成像仪相对应的x光光源器,所述辅助3d测量定位仪和x光光源器均与自动导引车可拆卸连接,所述自动导引车、3d成像仪、x光感光成像仪、辅助3d测量定位仪和x光光源器均与单片机电连接。
10.两台自动导引车之间形成间隙,所述自动导引车内设有单片机,其中一台自动导引车的一侧远离另一台自动导引车,且其相对应的另一侧靠近另一台自动导引车且设有3d
成像仪和x光感光成像仪,所述3d成像仪和x光感光成像仪均与自动导引车可拆卸连接,另一台自动导引车上设有与3d成像仪相对应的辅助3d测量定位仪和与x光感光成像仪相对应的x光光源器,所述辅助3d测量定位仪和x光光源器均与自动导引车可拆卸连接,所述自动导引车、3d成像仪、x光感光成像仪、辅助3d测量定位仪和x光光源器均与单片机电连接。两台自动导引车之间形成的间隙便于容纳待检测物,且不会与被拍摄物产生结构上的干涉,使用方便;3d成像仪用于视觉测量,且与辅助3d测量定位仪相结合,实时定位两台自动导引车之间的空间位置关系;其中一台装设有3d成像仪的自动导引车作为副车,另一台自动导引车作为主车,按单片机设定的既定路线行驶并引导装设有3d成像仪的自动导引车同向行驶,使其追踪另一台自动导引车的位置,并实时调整自身的距离和姿态,跟车行驶,两者配合,保证x光成像系统始终保持正常工作距离和姿态;在两辆自动导引车同向行驶过程中,x光感光成像仪利用x光光谱视觉成像,用于完成对含土壤或其他不透明材料类的植物根系拍摄工作,x光光源器用于x光感光成像仪的主动补光光源,x光感光成像仪与x光光源器相对应,以保证两者始终保持面对面,保证x光感光成像仪与x光光源器始终工作在需要的位置上,两个装置之间的距离以能容纳待检测物为准;单片机对采集到的数据进行图像分析,最终达到了对智慧温棚中栽培的植物无需挖开土壤就能对植物根系进行检测的目的。
11.作为优选,两台自动导引车呈镜像分布,所述自动导引车包括动力底盘,所述动力底盘上垂直安装有y轴导轨,所述y轴导轨上设有连接器,所述连接器上设有x轴导轨,所述x轴导轨的一端通过连接器与y轴导轨滑动连接,所述x光感光成像仪可拆卸安装于其中一台自动导引车上的x轴导轨的另一端,所述x光光源器可拆卸安装于另一台自动导引车上的x轴导轨的另一端,所述3d成像仪与其中一台自动导引车上的动力底盘可拆卸连接,所述辅助3d测量定位仪与另一台自动导引车上的动力底盘可拆卸连接。y轴导轨提供上下方向运动功能,用于调整x光感光成像仪和x光光源器的工作高度;x轴导轨主要做水平运动,用于控制x光感光成像仪和x光光源器之间的工作间距以匹配不同待测物的高度、方位及型号等,为x光摄像提供了位置矫正功能。
12.作为优选,所述连接器的一端设有与y轴导轨相匹配的滑块一,所述连接器通过滑块一与y轴导轨垂直滑动连接,用于调整x光感光成像仪和x光光源器的工作高度,所述连接滑块的另一端设有与x轴导轨相匹配的滑块二,所述连接器通过滑块二与x轴导轨水平滑动连接,用于控制x光感光成像仪和x光光源器之间的工作间距,为x光摄像提供了位置矫正功能,再加上自动导引车姿态的调整,最终使得x光感光成像仪和x光光源器的结合使用,可以适应不同高度、方位以及型号的待测物,使用范围广,适应性强。
13.作为优选,所述动力底盘的侧面设有视觉传感器,所述视觉传感器与单片机电连接,所述视觉传感器与动力底盘可拆卸连接,所述3d成像仪位于其中一台自动导引车上的动力底盘的侧面,其中一台自动导引车上的视觉传感器位于动力底盘上与3d成像仪相邻的另一侧面上,所述辅助3d测量定位仪位于另一台自动导引车上的动力底盘的侧面,另一台自动导引车上的视觉传感器位于动力底盘上与辅助3d测量定位仪相邻的另一侧面上。视觉传感器的位置设置有利于实时监测前方障碍物,并将信号传送给单片机,由单片机控制自动导引车避开障碍物,具有导航避障功能,保障设备安全并有利于保证拍摄的顺利进行。
14.作为优选,所述单片机上设有无线传输模块和存储模块,所述3d成像仪、x光感光成像仪和辅助3d测量定位仪均与存储模块电连接,所述无线传输模块与存储模块电连接。
存储模块便于实现对数据的存储,无线传输模块便于数据的传输,方便设备联网、上传或下载数据和远程操控。
15.作为优选,所述动力底盘内设有充电电池和充电插口,所述充电电池与充电插口电连接,所述动力底盘通过充电电池与单片机电连接。充电插口便于对充电电池进行充电;同时单片机可通过控制动力底盘实现自动驾驶。
16.本实用新型的有益效果是:不会与被拍摄物产生结构上的干涉,使用方便;实时定位两台自动导引车之间的空间位置关系,保证x光成像系统始终保持正常工作距离和姿态;单片机对采集到的数据进行图像分析,达到了对智慧温棚中栽培的植物无需挖开土壤就能对植物根系进行检测的目的;为x光摄像提供了位置矫正功能,再加上自动导引车姿态的调整,可以适应不同高度、方位以及型号的待测物,使用范围广,适应性强;具有导航避障功能,保障设备安全并有利于保证拍摄的顺利进行;具有数据储存和传输和自动驾驶功能。
附图说明
17.图1是本实用新型的结构示意图;
18.图2是设有辅助3d测量定位仪的自动导引车的结构示意图;
19.图3是实施例一中的结构示意图。
20.图中:1. 自动导引车,2. 3d成像仪,3. x光感光成像仪,4. 辅助3d测量定位仪,5. x光光源器,6. 动力底盘,7. y轴导轨,8. x轴导轨,9. 滑块一,10. 滑块二,11. 视觉传感器,12. 培养基,13. 植物系统,14. 支架。
具体实施方式
21.下面结合附图和具体实施方式对本实用新型做进一步的描述。
22.如图1所述的实施例中,一种基于x光成像的全自无障碍通行的植物根系拍照装置,它包括两台自动导引车1,两台自动导引车1之间形成间隙,自动导引车1内设有单片机,其中一台自动导引车1的一侧远离另一台自动导引车1,且其相对应的另一侧靠近另一台自动导引车1且设有3d成像仪2和x光感光成像仪3,3d成像仪2和x光感光成像仪3均与自动导引车1可拆卸连接,另一台自动导引车1上设有与3d成像仪2相对应的辅助3d测量定位仪4和与x光感光成像仪3相对应的x光光源器5,辅助3d测量定位仪4和x光光源器5均与自动导引车1可拆卸连接,自动导引车1、3d成像仪2、x光感光成像仪3、辅助3d测量定位仪4和x光光源器5均与单片机电连接。
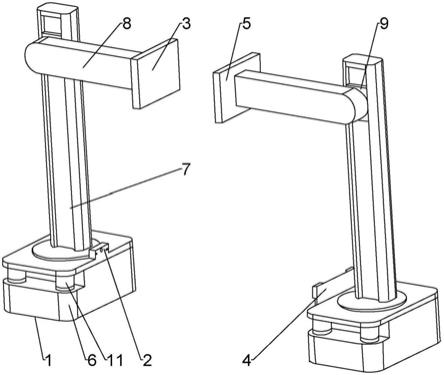
23.如图1和图2所示,两台自动导引车1呈镜像分布,自动导引车1包括动力底盘6,动力底盘6上垂直安装有y轴导轨7,y轴导轨7上设有连接器,连接器上设有x轴导轨8,x轴导轨8的一端通过连接器与y轴导轨7滑动连接,x光感光成像仪3可拆卸安装于其中一台自动导引车1上的x轴导轨8的另一端,x光光源器5可拆卸安装于另一台自动导引车1上的x轴导轨8的另一端,3d成像仪2与其中一台自动导引车1上的动力底盘6可拆卸连接,辅助3d测量定位仪4与另一台自动导引车1上的动力底盘6可拆卸连接。
24.如图1和图2所示,连接器的一端设有与y轴导轨7相匹配的滑块一9,连接器通过滑块一9与y轴导轨7垂直滑动连接,连接滑块的另一端设有与x轴导轨8相匹配的滑块二10,连接器通过滑块二10与x轴导轨8水平滑动连接。
25.如图1和图2所示,动力底盘6的侧面设有视觉传感器11,视觉传感器11与单片机电连接,视觉传感器11与动力底盘6可拆卸连接,3d成像仪2位于其中一台自动导引车1上的动力底盘6的侧面,其中一台自动导引车1上的视觉传感器11位于动力底盘6上与3d成像仪2相邻的另一侧面上,辅助3d测量定位仪4位于另一台自动导引车1上的动力底盘6的侧面,另一台自动导引车1上的视觉传感器11位于动力底盘6上与辅助3d测量定位仪4相邻的另一侧面上。单片机上设有无线传输模块和存储模块,3d成像仪2、x光感光成像仪3和辅助3d测量定位仪4均与存储模块电连接,无线传输模块与存储模块电连接。动力底盘6内设有充电电池和充电插口,充电电池与充电插口电连接,动力底盘6通过充电电池与单片机电连接。
26.如图3所示的实施例一中,常见智能温棚的植物栽培作为被测对象。将装有3d成像仪2的自动导引车1编号为a,将装有辅助3d测量定位仪4的自动导引车1编号为b。植物栽培设备由培养基12和植物系统13组成,培养基12的底部通过支架14支撑。在此应用场景中,本装置可以无障碍无干涉的工作。在工作流程中,本装置通过调两台自动导引车1的位置以及x轴导轨8的高度和水平位移,将被测对象的培养基12恰好卡在x光感光成像仪3与x光光源器5之间,然后b沿着与培养基12平行的方向运动,同时启动a以及a的3d成像仪2,让a实时追踪自动导引车b的位置,实时调整自己的位置,跟随b同向行驶,同位置并且保持固定距离行驶。x光感光成像仪3在运动过程中,对目标进行持续拍照。由于采用两台自动导引车的分离式结构设计,底部支架14的存在,对整个装置的工作不会产生碰撞风险。也就是说,本装置可以很好的在类似的、底部存在固定障碍的场所运行,不受结构影响。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1