汽车驾驶辅助系统检测平台的制作方法
1.本实用新型涉及一种汽车检测平台,尤其是一种检测汽车驾驶辅助功能的平台设备。
背景技术:
2.目前,许多高端汽车和新能源智能汽车都集成了驾驶辅助系统,该系统主要包括防撞预警、自动制动、车道偏离等功能,可以在出现交通危险时,及时提醒驾驶人员,主动采取制动措施,避免事故的发生。因此,驾驶辅助系统是否能够正常工作,关系到车辆行驶尤其是高速行驶的安全。
3.现有技术中的汽车检测平台,如公开号为cn112781895a的中国发明专利《集成汽车排放及汽车综合安全性能检验平台》所公开的技术方案,该类平台通常设置有台体、滚筒组件等装置,可以配合车辆将车速提高到所需要的区间,进行制动、排放等项目的检测。
4.但是,由于无法模拟“与前车距离过近”、“车道偏离”等场景,所以驾驶辅助系统的功能检测仍要依靠路试来完成。测试时,需要驾驶车辆,将车速提高,然后借助其它车辆模拟“与前车距离过近”的场景,故意改变车辆方向模拟“车道偏离”的场景,然后观察车辆是否发出报警、主动刹车。这种方式的缺陷在于:需要在道路上高速行驶,操作难度大,耗时长,成本高,具有一定的危险性,并且难以模拟出准确的车距。
技术实现要素:
5.本实用新型提出了一种汽车驾驶辅助系统检测平台,其目的是:实现真实路况的模拟,检测汽车驾驶辅助系统的功能是否正常,解决现有检测方案操作难度大、模拟不准确、耗时长、成本高和安全性差的问题。
6.本实用新型技术方案如下:
7.一种汽车驾驶辅助系统检测平台,包括台体和安装在台体上的滚筒组件,所述滚筒组件用于与待检车辆的车轮相配合,还包括基体和agv小车;
8.所述基体上设有洞口,所述台体安装在该洞口中;
9.所述agv小车放置在基体上,且位于台体的前侧;agv小车上安装有标靶板,所述标靶板上印有车道图案。
10.作为本检测平台的进一步改进:所述基体上还设有导航磁条,用于为agv小车的前后移动提供基准。
11.作为本检测平台的进一步改进:所述基体上还设有警戒标识。
12.作为本检测平台的进一步改进:所述警戒标识包括第一警戒标识和第二警戒标识,所述第一警戒标识与台体之间的距离小于第二警戒标识与台体之间的距离。
13.相对于现有技术,本实用新型具有以下有益效果:本装置在传统的检测平台基础上增加agv小车,使用台体上的滚筒组件可以配合车辆达到所需要的车速,同时通过控制agv小车前后移动,改变与待检车辆之间的距离,可以模拟“与前车距离过近”的场景,还可
以通过控制装载有标靶板的agv小车左右移动,来模拟“车道偏离”的场景,最终在台上实现汽车高速状态下的汽车驾驶辅助系统的功能检测,无需路试,操作简单,效率高,安全性好,并且可以准确的控制agv小车与车辆之间的距离。
附图说明
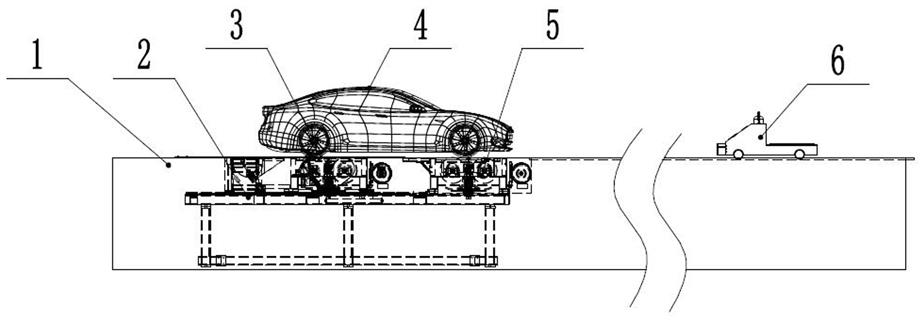
14.图1为本平台的侧视示意图;
15.图2为本平台的俯视示意图。
具体实施方式
16.下面结合附图详细说明本实用新型的技术方案:
17.如图1和2,一种汽车驾驶辅助系统检测平台,包括基体1、台体2和安装在台体2上的滚筒组件。
18.所述基体1底部有支架,顶面上开设有洞口,所述台体2安装在该洞口中。
19.本实施例中,所述台体2上设有前后两组滚筒组件,分别为第一滚筒组件3和第二滚筒组件5。所述第一滚筒组件3与待检车辆4的两个后轮相配合,第二滚筒组件5与待检车辆4的两个前轮相配合。每组滚筒组件中包括主动滚筒、从动滚筒和浮动滚筒。在传动带或其它传动机构的作用下,从动滚筒跟随主动滚筒转动。主动滚筒通过离合装置与电机相连接,当离合装置接合时,通过电机可以驱动主动滚筒和从动滚筒同时转动,带动车轮转动。另一方面,离合装置断开时,车轮可以带动滚筒转动。主从滚筒所连接的回转轴上还连接有飞轮,通过挂载不同惯量的飞轮,可以模拟真实的路况阻尼。浮动滚筒则是在气缸或弹簧的作用下,始终与车轮保持接触,该滚筒处安装有转速传感器,用于检测车轮的实际转速。
20.需要说明的是,台体2、滚筒组件及相关传动结构,都是现有技术,可以参考公开号为cn112781895a的中国发明专利《集成汽车排放及汽车综合安全性能检验平台》所公开的技术方案进行实施,也可以参考其它本领域的文献来设计、实施台体2及滚筒组件部分。
21.进一步的,所述滚筒组件也可以是多组,这种结构对应具有多个车轴的大型车辆,如卡车等。
22.所述基体1顶面为带状,上面摆放有agv小车6。agv小车6位于台体2的前侧。agv全称为automated guided vehicle,它是指装备有电磁或光学等自动导航装置,能够沿规定的导航路径行驶,具有安全保护以及各种移载功能的运输车。该类小车还可以配备无线遥控器,通过手动遥控,来控制其前后、左右自由移动。常见的遥控器如南京帝淮的can总线输出双摇杆无线遥控器,型号为dh
‑
2yl1m6b2scan。
23.由于agv小车6本身具有一定的尺寸和体积,因此可以直接模拟前方车辆。显然,也可以在agv小车6尾部安装汽车保险杠、钢板等装置,来增大模拟障碍物的尺寸,进行不同场景的模拟检测。
24.进一步的,为了实现车道偏离检测,agv小车6上还安装有标靶板,所述标靶板上印有车道图案。所述标靶板,可以是直立设置的,安装在agv小车6的尾部,也可以是水平安装在agv小车6上。根据所要模拟的车道宽度、车道线形状,可以配备不同的标靶板,分别模拟。
25.进一步的,所述基体1上还设有导航磁条9,用于为agv小车6的前后移动提供基准。一般的agv小车6都带有沿磁条自动匀速巡航的功能。这样,在模拟前车不断靠近待检车辆4
的时候,可以将agv小车6设置成自动巡航模式,不必手动遥控,操作更加便利。
26.所述基体1上还设有警戒标识。本实施例中,警戒标识包括第一警戒标识7和第二警戒标识8,所述第一警戒标识7与台体2之间的距离为2米,第二警戒标识8与台体2之间的距离为10米,可以根据情况自由设定。通常的,所述台体2前端与待检车辆4的前端位置是相近的。警戒标识的作用,主要是提示操作人员当前agv小车6与待检车辆4之间的距离,是否已经到达驾驶辅助功能应当开始启动的范围。
27.根据不同的车型,可以在基体1上设置多组不同的警戒标识。还可以采用磁吸式的警戒标识来代替之间印刷在基体1上的标识,根据实际情况移动警戒标识的位置。
28.还可以采用其它的距离检测方式,比如在agv小车6尾部安装红外或激光式测距装置,对准待检车辆4的前侧,实时测量精准车距。
29.工作时,待检车辆4位于台体2上,四个车轮与四组滚筒组件分别对应接触。发动汽车,由滚筒带动车轮转动,使车速提高到可触发主动刹车和车道偏离预警的速度。然后,检测防撞预警和自动制动功能:遥控agv小车6、或控制agv小车6沿导航磁条9逐渐向待检车辆4靠近,同时观察agv小车6与车辆之间的距离;当agv小车6到达第二警戒标识8处时,观察车辆是否发出报警提示,如果发出报警说明防撞预警功能正常;当agv小车6到达第一警戒标识7处时(即厂家设定的最后安全距离),观察车辆是否制动(判断方式为,如果驱动滚筒的电机的输出扭矩提高,说明对应的车轮发生了制动,也可以根据车轮转速判断),如果出现制动说明自动制动功能正常。检测车道偏离功能的方法为:在agv小车6上装载印有车道线的标靶板,待检车辆4依然在滚筒上且保持移动的车速,agv小车6在待检车辆4的前方左右移动,观察车辆是否给出车道偏离的警示,如果给出,则说明该功能正常。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1