用于测距应用的频率信息快速提取的制作方法
用于测距应用的频率信息快速提取
1.相关申请的交叉引用本公开基于和要求2020年4月3日提交至美国专利和商标局的美国临时专利申请63/005,011号的优先权和权益。上述申请的全部内容通过引用并入本文。
技术领域
2.本公开的实施方案大体上涉及激光探测和测距(“lidar”)领域,更具体地,涉及调频连续波(frequency modulated continuous wave,“fmcw”)lidar系统和方法。
背景技术:
3.lidar是一种使用激光来测量至物体的距离的遥感方法。闪光或扫描lidar提供周围环境的三维点云。以前和现在的lidar导航系统(例如,车辆上的导航系统)依赖于称为飞行时间(“tof”)lidar的第一代脉冲技术。最近,fmcw lidar提供了对tof视觉系统的升级,并且由于检测返回信号的相干性(coherency)而具有优势。存在使fmcw lidar系统可扩展且易于集成在紧凑且苛刻的环境(例如自动驾驶车辆(autonomous vehicle))中的需求。
技术实现要素:
4.本发明的实施方案包括一种fmcw lidar系统,该系统可扩展且易于集成在紧凑且苛刻的环境(例如在自动驾驶车辆)中。本公开的改进的fmcw lidar系统可以包括:电光调制器(electro-optic modulator),其被配置为调制由激光源产生的激光;平衡光探测器(balanced photo detector),其被配置为处理与从目标返回的激光的信号连接的激光的本地副本的干扰信号,并输出拍音(beatnote)信号;具有两个输出端的调制源,其中调制源被配置为在电光调制器和平衡光探测器所需的带宽上扫频相位;以及用于测距应用的频率信息快速提取(“fire-ra”)系统,其被配置为接收来自平衡光探测器的干扰信号,用来自调制源的两个输出端中的一个的用于平衡光探测器的信号处理干扰信号,并根据经处理的干扰信号输出目标的距离和速度数据。
5.fire-ra系统可以为在现代fmcw lidar产品上可用的传统频域dsp系统提供更简单的开发和更经济的解决方案。它可以为真正地可扩展低功率视觉解决方案铺平道路,该方案仍然可以同时提取径向速度和距离信息而不需要常见复杂的高功率fpga芯片的开销。
6.本文描述的这些实施方案和其他实施方案是lidar领域的改进,特别是fmcw lidar领域的改进。这些装置的各种配置通过实施方案来描述,这些实施方案仅是示例并且不旨在限制,而是提供对所要求保护的本发明的进一步解释。在察看以下附图和详细描述后,本文描述的主题的其他系统、装置、方法、特征和优点对于本领域的技术人员将是显而易见的。旨在将所有这些另外的系统、装置、方法、特征和优点都包括在本说明书中,包括在本文所述主题的范围内,并受所附权利要求的保护。如果权利要求中没有对这些特征的明确叙述,示例实施方案的特征不应该被解释为限制所附权利要求。
附图说明
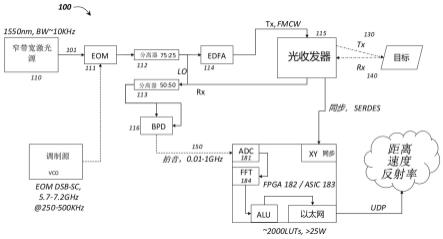
7.图1展示了根据本公开的一些实施方案的示例性的fmcw lidar系统的示意图。
8.图2展示了根据本公开的一些实施方案的示例性的具有用于测距应用的频率信息快速提取的fmcw lidar系统的高级示意图的示意图。
9.图3展示了根据本公开的一些实施方案的示例性的具有iq解调配置的fmcw lidar系统的示意图。
10.图4展示了根据本公开的一些实施方案的示例性的iq解调光单元配置的示意图。
11.图5展示了根据本公开的一些实施方案的示例性的高级fire-ra拍音检测配置的示意图。
具体实施方式
12.以下公开内容描述了本发明的各种实施方案和在其优选的最佳模式实施方案中的至少一个中的使用方法,其在以下描述中进一步详细定义。本领域普通技术人员可以在不脱离其精神和范围的情况下对本文所描述的内容进行改变和修饰。尽管本发明易于以不同的形式出现在不同的实施方案中,但是在附图中示出并且在此将详细描述本发明的优选实施方案,但应当理解,本公开被认为是本发明原理的示例性,并且并非旨在将本发明的广泛方面限于所展示的实施方案。除非另有说明,否则相对于本文提供的任何实施方案描述的所有特征、元件、部件、功能和步骤旨在能够与任何其他实施方案的进行自由地组合和替换。因此,应当理解,所展示的内容仅出于示例的目的而阐述,而不应被视为对本发明范围的限制。
13.tof lidar有许多缺点。例如,接收的信号可能包括由于白天的眩光而产生的噪声。在同一附近地区的多个系统之间可能存在干扰。探测范围可能是有限的。fmcw lidar系统可以对tof视觉系统提供升级。fmcw lidar系统可以提供一些优势。例如,fmcw lidar系统可以提供检测返回信号的相干方法。在fmcw lidar系统中,返回光可能会受到初始信号的本地副本的干扰,使检测能够很好地屏蔽与本地副本不相干的外部噪声。
14.fmcw lidar系统的相干干涉性质是动态范围可以显著更大,因为检测到的信号与电磁(“em”)场本身成正比,而不是与采样光的强度(em
filed2
)成正比。此外,fmcw lidar系统可能能够从目标观察多普勒频移(doppler shift)信息,其能够即时测量速度/速率,而tof系统使用复杂的ai操作在一连串的帧期间进行估计。在pct专利申请pct/us2018/059033号中描述了一种示例性的fmcw lidar系统,其内容整体并入本文。
15.图1展示了根据本公开的一些实施方案的示例性的fmcw lidar系统的示意图。如图1所示,fmcw系统100可以包括被调制的窄带宽激光源(例如,二极管)110。窄带宽激光源110可以产生激光101,并且激光的一部分130被发送至目标,而其余部分被保留为本地副本且随后被来自目标的返回信号140干扰。在一些实施方案中,激光的一部分130从分离器112分离。在一些实施方案中,分离器112是75:25分离器。在一些实施方案中,激光通过如图1所示的电光调制器(“eom”)111、掺铒光纤放大器(erbium-doped fiber amplifier,“edfa”)114和光收发器115被进一步处理。在一些实施方案中,eom 111被配置为从窄带宽激光源110调制激光101。
16.产生的干扰信号可以被称为拍音(或有时称为拍)150,并且能够被平衡光探测器
(“bpd”)116记录,以阻止任何共模噪声并进一步提高系统的准确性。在一些实施方案中,bpd 116可以处理与返回信号140连接的激光的本地副本的干扰信号。
17.在一些实施方案中,电信级(telecommunication grade)部件可能容易获得且适合使用,因为它们具有高可靠性和相对可用性。此外,电信级部件通常被认为是对眼睛安全的,因为它们的操作通常被限制在1550 nm光谱内。光可以用作载波频率,在其上可以刻上低得多的调制频率。调制频率比对应于1550 nm波长处的载波的数百太赫兹(“thz”)频率更容易采样。典型的调制频率范围,覆盖大约2-200米的测距距离,在大约6 ghz的调制频率将具有500-700 mhz的带宽,每个调制频率对应于远离lidar源的特定径向距离。
18.然而,fmcw lidar系统的主要困难中的一项是它能处理的点的数量,因为整个调制频率的频谱都需要被采样,有时以500 khz或更高的比例。例如,如图1所示,即使bpd 116可以立刻对调制频率进行采样,但数字信号处理(“dsp”)系统的制作可能并不简单,并且通常涉及至少一个高速(例如,大于1 ghz)模拟数字转换器(“adc”)181和具有超过2000个查找表(“lut”)的现场可编程门阵列(“fpga”)182,以便对受干扰信号进行快速傅里叶变换(“fft”)并提取必要的信息。例如,如图1所示,在信号已经被adc 181处理后,可以在fpga 182上实施专门的单元fft 184以对干扰信号进行fft。此外,可扩展性成为一个问题,因为每次改变调制频率上的参数时都需要定制芯片设计,通常涉及专用集成电路(“asic”)设计或其他矫枉过正的解决方案。
19.此外,这些复杂的fpga(例如,图1的fpga 182)可能具有高热负载并消耗数十至数百瓦的功率,这使得它无法集成到各种应用(例如,在自动驾驶车辆)中。
20.需要一种fmcw信号处理系统,该系统可扩展且易于集成在紧凑且严苛的环境(例如自动驾驶车辆)中,并提供本文所述的其他优点。
21.本公开的实施方案提供了解决上述问题的方法和系统。图2展示了根据本公开的一些实施方案的示例性的具有用于测距应用的频率信息快速提取的fmcw lidar系统的高级示意图的示意图。如图2所示,fmcw lidar系统200可以是可扩展的且易于集成在紧凑且严苛的环境中。可以理解的是,fmcw lidar系统200的一些部件与图1中描述的那些相似。例如,窄带宽激光源210、eom 211、分离器212、分离器213、edfa 214和光收发器215可以分别与图1中所示的窄带宽激光源110、eom 111、分离器112、分离器113、edfa 114和光收发器115相似。
22.fmcw lidar系统200可以包括用于测距应用的频率信息快速提取(“fire-ra”)280采样和处理解决方案,该解决方案可以允许fmcw lidar系统200变得可扩展并易于集成在紧凑且严苛的环境(例如,自动驾驶车辆)中。在一些实施方案中,该解决方案的示例性优点可以包括以下几点。第一,可以实现从频域到时域的标量转换,并且可以避免对fft的需求。第二,fmcw lidar系统可以允许使用廉价的商用现成部件(“cots”)。第三,可以允许通过对应于大约2 cm径向距离分辨率的时间-数字转换器(“tdc”) 100 ps的时间分辨率。第四,模块化设计可以被用于减少或消除对asic开发的需求(例如,图1中所示的asic 183或fpga 182)。第五,与传统的fmcw dsp系统相比,fmcw lidar系统200可以使用更低的功率消耗。例如,fmcw lidar系统200可以使用大约2 w的功率,这比传统的fmcw dsp系统低7倍。
23.在一些实施方案中,fmcw lidar系统200可以包括具有两个输出端的调制源270。来自调制源270的输出端可以在图2所示的eom 211和bpd 216的所需带宽上进行相位扫频。
在一些实施方案中,这可以通过直接数字合成器(“dds”)或高功率(例如10w rf)压控振荡器(“vco”)之后的分离器来实现,其中高功率通道驱动eom且分离器驱动bpd的采样。在一些实施方案中,dds和vco可以是图2中所示的调制源270的一部分。vco设置的优点是可以使用现成的rf部分,而且故障排除也很容易,因为系统可以不需要实现对输出波形的控制,例如在使用dds时。对于大批量的实施,dds方法可以是优选的,因为其可以提供主要的制造优势。
24.在一些实施方案中,fire-ra系统可以在一个啁啾(chirp )周期(例如500 khz重复率)的持续时间期间将bpd的输出视为固定的rf频率,其中调制源270可以将eom调制从约5.7 ghz斜升至约7.2 ghz。在一些实施方案中,可以选择调制源270以获得可用的cots vco的最佳性能。然后,bpd采样通道可以与eom同步扫频,并在射频(radio frequency,
ꢀ“
rf”)混频器中混合以在bpd拍音和混频器上扫频的本地振荡器(“lo”)端口重叠(coincide)处提取频率差。在一些实施方案中,rf混频器可以具有大约0至1.5 ghz的工作范围。与传统的高速adc系统相比,其优势之一是在混频器中以模拟方式进行采样,而不必以超过1 gs/s的分辨率对bpd的整个输出频谱进行采样。fire-ra系统的rf混频器只需检测拍音何时发生并记录波形,而不必跟踪bpd的其余频谱信息。在一些实施方案中,如果bpd上有多个频率,在混频器的输出端处可以出现多个下变频(down-converted)信号。在fire-ra系统的iq解调实施的情况下,这些可以在后阶段进行解释以提取径向距离和速度或速率。
25.一般来说,fire-ra系统可以跟踪“拍音何时发生”以及调制源带宽和“固定值”拍音之间有多少混合频率发生。这可以消除使用fft的需要,因此显著减少fpga上计算径向距离和速度值所需的计算能力。在一些实施方案中,fire-ra系统可以在距离光收发器300 m的范围内以5 cm或更好的总距离精度进行检测,并同时提取0-156 mph范围的径向速度。这对应于两个物体以78 mph相互移动,同时由于对fft和高速adc没有要求而保持热负载在2 w以下。
26.在一些实施方案中,为了及时“定位”混合频率何时发生,可以在图2中的rf混频器的输出端处应用带通滤波器(band-pass filter ,“bpf”)281。这可以在拍音发生时的频率周围切出窗口并允许包络检测器(envelope detector)282记录该发生。例如,每次包络检测器“看到”远离0的调制时,它可以跟踪数据包的轮廓并输出作为时间函数的脉冲形状。这种方案的优点是可以不需要知道拍音的实际形状,而不是只跟踪“何时发生”。在一些实施方案中,通过逻辑门,fire-ra系统可以提取作为时间函数的数字信号,该数字信号看起来像中心在拍音发生时间的峰值处的方波。在一些实施方案中,可以保留关于多普勒频移(或径向速度幅度)的信息,但是在一个啁啾的周期(例如2 μs)内检测到的事件的数量和它们在时间上的位置。在一些实施方案中,带通滤波器281可以是带阻滤波器。
27.在一些实施方案中,fire-ra系统可以包括tdc,其能够以100 ps的时间精度确定拍音的发生,而要达到5 cm所需的分辨率的时间精度为300ps。在这个意义上,fire-ra系统在达到简单的tdc所能提供的极限之前还有很大的余量。在一些实施方案中,tdc使用功率《1 w的fpga。
28.在一些实施方案中,fire-ra系统可以通过优化的serdes电缆(其节省了控制线的空间)输出与来自图2所示的光收发器215的x和y位置信息相结合的tdc径向距离和速度数据,并将其通过使用用户数据报协议(“udp”)结构的以太网(ethernet cable)电缆输出至
客户端(例如可视化系统(“ros”)、自动驾驶车辆或自动驾驶汽车ai单元)。在一些实施方案中,与x和y位置信息结合的距离和速度数据是从目标测量的。
29.图3展示了根据本公开的一些实施方案的示例性的具有iq解调配置的fmcw lidar系统的示意图。可以理解的是,图3中所示的fmcw lidar系统300的一些部件与图2中描述的那些相似。例如,窄带宽激光源310、eom 311、分离器312、edfa 314和光收发器315可以分别与图2中所示的窄带宽激光源210、eom 211、分离器212、edfa 214和光收发器215相似。
30.如图3所示,fmcw lidar系统300可以使用iq解调光单元360来保持系统中光学lo的两个单独的副本之间的相对相位差(例如,具有45度相位差,圆形偏振),并将用rx光束分别干扰它们以实现所谓的i和q通道之间的分离。在一些实施方案中,两个副本分别用50%的rx光束进行干扰。在一些实施方案中,多普勒频移的方向然后可以根据两个通道中各自由bpd终止的拍音之间的相位偏移来提取。在一些实施方案中,i通道采用标准的fire-ra检测方案,而它的副本与q通道混合以提取两者之间的相位差,最终得出速度矢量的方向。在两个通道之间使用混频器的好处之一是,慢速adc 388可以而后提取相位差,优化系统的成本和热负载。然后将“正”或“负”值分配给上述udp数据包。
31.图4展示了根据本公开的一些实施方案的示例性的iq解调光单元配置的示意图。可以理解的是,图4所示的iq解调光单元配置可以并入图3所示的fmcw lidar系统300(例如,作为iq解调光单元360)。如图4所示,iq解调光单元配置可以允许区分径向速度矢量的符号。例如,可以通过跟踪i和q通道的相位差来区分径向速度因子的符号。该单元的目的是在物理生成lo和所接收的rx光束之间的拍音,并将输出分离为两个正交偏振轴上的投影。
32.在一些实施方案中,与图2类似,图4中的lo振荡器可以与rx光束混合。然而,lo可以在自由空间中被转换为圆形偏振(例如,通过四分之一波板的方法)。这可以为系统建立参考。在一些实施方案中,rx光束也可以在正交偏振轴上被分离成相等的投影而不是在它们之间有延迟,这可以简单地通过半波板来旋转。圆形lo和线性但偏振旋转的rx光束可以在非偏振光束分离器处进行干涉,然后可以通过偏振光束分离器分成单独的部件。在一些实施方案中,可能存在50%的信号损失,这可以通过增加另一组偏振分离通道来进一步改善。在一些实施方案中,50%的损失对于生成可靠的拍音信号是可以接受的。
33.在一些实施方案中,产生的拍音然后可以根据rx光束上的多普勒频移的符号不断地旋转一个方向或另一个方向。两个通道,i和q,可以被电子跟踪。例如,这两个通道可以通过简单的混频器来跟踪,该混频器获取两个pbd的输出的副本并提取相位关系符号。在一些实施方案中,相位关系符号然后可以被送到如图3所示的adc中。
34.图5展示了根据本公开的一些实施方案的示例性的高级fire-ra拍音检测配置的示意图。可以理解的是,图5所示的拍音检测配置可以被并入图3所示的fmcw lidar系统300中。如图5所示,fire-ra拍音检测配置可允许实时、非fft fmcw lidar信号处理。可以理解的是,图5中的一些元件被简化了,更详细的步骤在图2、图3或图4中呈现。如图5所示,光拍音频率在发生的时刻之后可以被视为固定的,而调制扫频源可以在bpd的带宽上不断扫频。混频器可以对拍音进行降频,并且带通滤波器可以隔离在包络检测器感兴趣的范围内的部分振荡。然后,包络可以被分档和采样(例如,通过tdc的方式),从时间转换为距离和速度信息(例如,基于在一个啁啾斜坡(chirp ramp)中检测到的峰值数量),并可以与x和y位置信息相结合,从而形成点云。点云可以通过udp发送至可视化设备(例如笔记本电脑),但也可
以直接输入ai(例如,自动驾驶车辆中的ai)用于进一步分析。
35.前面部分中所述的过程、方法和算法中的每一个都可以体现在由一个或多个计算机系统或包括计算机硬件的计算机处理器执行的代码模块中,并由其完全地或部分地自动化。过程和算法可以部分地或全部地在特定应用的电路中实现。
36.上面描述的各种特征和过程可以相互独立地使用,或以各种方式组合。所有可能的组合和子组合都旨在落入本说明书的范围内。此外,在一些实施方案中可以省略某些方法或过程块(block)。本文描述的方法和过程也不限于任何特定的顺序,并且与其相关的块或状态可以以其他适当的顺序进行。例如,所描述的块或状态可以以具体地公开的顺序以外的顺序进行,或者多个块或状态可以组合到一个块或状态中。块或状态的实施例可以以串行、并行或某种其他方式进行。块或状态可以被添加到所公开的实施方案中或从其中移除。本文描述的系统和部件的实施例可以被配置的与所描述的不同。例如,与所公开的实施方案相比,元件可以被添加、移除或重新排列。
37.本文描述的方法的各种操作可以至少部分地由一个或多个临时配置(例如,通过软件)的或永久配置来进行相关操作的处理器进行。无论是临时配置的还是永久配置的,这样的处理器可以组成以处理器实现的引擎,其运行来进行本文所述的一个或多个操作或功能。
38.同样地,本文所述的方法可以至少部分地由处理器实现,一个或多个特定的处理器,作为硬件的示例。例如,方法中的至少一些操作可以由一个或多个处理器或以处理器实现的引擎来进行。此外,一个或多个处理器还可以运行以支持“云计算”环境中的相关操作的性能或作为“软件即服务”(saas)。例如,至少一些操作可以由一组计算机(作为包括处理器的机器的示例)进行,这些操作可以通过网络(例如互联网)和通过一个或多个适当的接口(例如应用程序接口(api))访问。
39.某些操作的性能可以分布在处理器之间,不仅驻留在单个机器内,而且部署在若干台机器上。在一些实施方案中,处理器或以处理器实现的引擎可以位于单一的地理位置(例如,在家庭环境、办公室环境或服务器场内)。在其他实施方案中,处理器或以处理器实现的引擎可以分布在多个地理位置。
40.在整个说明书中,多个实例可以实现作为单一实例描述的部件、操作或结构。尽管一个或多个方法的单个操作被作为单独的操作来说明和描述,但一个或多个单独的操作可以同时进行,而且不需要要求这些操作以所示的顺序来进行。在配置中作为单独部件呈现的结构和功能可以作为组合的结构或部件来实施。同样地,作为单一部件呈现的结构和功能可以作为单独的部件来实现。这些和其他变化、修改、补充和改进都落入本文主题的范围内。
41.如本文所用,相同的元件用相同的附图标记表示。除非另有说明,否则使用“例如”、“等”和“或”表示非排他性替代方案而没有限制。除非另有说明,否则“包括”或“包含/包括/含有”的使用是指“包括但不限于”或“包含但不限于”。
42.如本文所用,置于第一实体和第二实体之间的术语“和/或”是指以下中的一个:(1)第一实体、(2)第二实体、以及(3)第一实体和第二实体。用“和/或”列出的多个实体应以相同的方式解释,即,如此连接的实体中的“一个或多个”。除了由“和/或”子句明确标识的实体之外,还可以选择性地存在其他实体,不论与具体标识的实体相关还是无关。因此,作
为非限制性的例子,在与开放式语言(例如“包含”)结合使用时,对“a和/或b”的引用在一个实施方案中可以仅指a(任选地包括除b以外的实体);在另一个实施方案中,仅指b(任选地包括除a以外的实体);在另一个实施方案中,指a和b(任选地包括其他实体)。这些实体可以指元件、动作、结构、步骤、操作、值等。
43.尽管已经参照具体的实施方案对主题进行了概述,但在不脱离本说明书的实施方案的更广泛的范围的情况下,可以对这些实施方案进行各种修改和变化。具体实施方式不应被理解为限制性的,并且各种实施方案的范围仅由所附的权利要求以及此类权利要求所享有的全部等效物范围来界定。此外,本文使用的相关术语(例如“第一”、“第二”、“第三”等)并不表示任何顺序、高度或重要性,而是用来将一个元件与另一个元件区分开来。此外,术语“一”、“一个”和“多个”在本文中并不表示数量的限制,而是表示存在至少一个提及的事物。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1