一种基于数字孪生技术的同轴度测量装置及校准方法
1.本发明涉及一种同轴度测量装置及校准方法,属于同轴度校准技术领域。
背景技术:
2.目前我国航空发动机和燃气轮机等领域缺乏超精密同轴度校准计量,操作多依赖于手 工和经验,导致测量精度低、装配一致性差、一次装配合格率低,严重影响了大型精密回 转装备的装配质量和综合性能,亟需实现大型回转装备(航空发动机、燃气轮机等)的同 轴度校准及系统智能化。当前,工业领域正在经历新一轮的产业变革,世界各国纷纷推出 以“工业互联网”和“工业4.0”为核心的工业升级计划。数字孪生可以通过对生产和装配过 程的虚拟仿真,提高企业设备装配和测试的效率,为解决面向产品全生命周期的管理和升 级提供支持。
3.实现大型回转装备(航空发动机、燃气轮机等)同轴度测量校准以及误差补偿的智能 化,是我国超精密测量领域发展面临的重大问题。目前,国内大型回转装备同轴度测量主 要基于超精密同轴度测量仪,包括单通道同轴度测量仪、双通道同轴度测量仪、四通道同 轴度测量仪、五通道同轴度测量仪等。这些装置由于导轨、轴系等安装误差,会造成装置 系统误差的存在,导致同轴度测量偏差。数字孪生是将虚拟和现实相结合的一种先进技术, 利用数字孪生可将同轴度校准可视化,利用高保真模型和实物配准,实现同轴度测量装置 的校准。
技术实现要素:
4.本发明为解决同轴度测量仪测量时的圆度和同心/同轴存在系统误差的问题,进而提 出一种基于数字孪生技术的同轴度测量装置及校准方法。
5.本发明为解决上述问题采取的技术方案是:本发明所述测量装置包括同轴度标准器、 超精密转台、位置调节机构、基座、增强现实眼镜和电脑;所述位置调节机构和超精密转 台并排安装在基座的上表面,同轴度标准器安装在所述位置调节机构上,同轴度标准器的 信号输出端与电脑的信号输入端连接,增强现实眼镜的信号输入端与电脑的信号输出端连 接。
6.进一步的,所述位置调节机构包括水平导轨和竖直导轨,竖直导轨的下端与基座的上 表面固定连接,水平导轨安装在竖直导轨上,且水平导轨能沿竖直导轨上下直线移动,同 轴度标准器安装在水平导轨上,且同轴度标准器能沿水平导轨直线往复移动。
7.进一步的,所述一种基于数字孪生技术的同轴度测量装置还包括电传感器;超精密转 台通过电传感器与基座的上表面连接,电传感器的信号输出端与电脑的信号输入端连接。
8.本发明所述校准方法的具体步骤为:
9.步骤一、将计量用同轴度标准器放置于转台中心,保证电感传感器能够测量到同轴 度标准器轮廓;
10.步骤二、基于增强现实眼镜,利用虚实注册技术实现虚拟同轴度标准器和现实同轴 度标准器的配准,并将同轴度标准器测量校准流程在增强眼镜和显示屏上进行可视化;
11.步骤三、电感传感器测量同轴度标准器多个截面的跳动,记录截面相对转台平面的 高度数据,并拟合出同轴度标准器的同轴度值;
12.步骤四、同轴度标准器数字孪生体实时跟进同轴度标准器的轮廓数据和同轴度数据;
13.步骤五、同轴度测量装置测量同轴度标准器的数值和标准器实际值进行对比,从而实 现同轴度测量装置实物和虚拟模型的精密校准。
14.进一步的,步骤二中虚实注册技术的步骤为:
15.步骤a、将数字孪生中实体和虚拟模型均进行点云化处理,同时采用改进icp方法 进行点云配准;
16.步骤b、确定损失函数为:
[0017][0018][0019]
公式(1)和(2)中,ny(yk)表示yk在y中的局部邻域,h表示核带宽,l
k,l
表示损 失函数值,w
l
表示权重,t(x)表示点云x经过旋转平移变换后形成的点云,y
l
表示点云 t(x)中的点,yi表示yk局部领域中的点,η表示点集的重叠率,k表示点yk在点云y中 的序号,l表示点y
l
在点云t(x)中的序号。
[0020]
本发明的有益效果是:本发明基于数字孪生技术和同轴度标准器,对大型同轴度测量 装置进行同轴度测量校准。通过数字孪生的虚实注册技术,将同轴度标准器的实体和虚拟 模型进行配准,基于装置同轴度测量校准数据,实现同轴度校准的实时跟进。有效保证了 同轴度测量装置的同轴度测量校准的精确性和可视化。
附图说明
[0021]
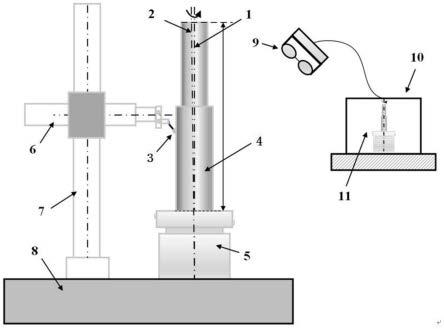
图1是本发明所述测量装置的结构示意图;
[0022]
图2是同轴度测量装置数字孪生框架;
[0023]
图1中,1-转台理论回转轴线,2-转台实际回转轴线,3-同轴度标准器,4-超精密转 台,5-电传感器,6-水平导轨,7-竖直导轨,8-基座,9-增强现实眼镜,10-电脑。
具体实施方式
[0024]
具体实施方式一:结合图1和图2说明本实施方式,本实施方式所述一种基于数字孪 生技术的同轴度测量装置包括同轴度标准器3、超精密转台4、位置调节机构、基座8、 增强现实眼镜9和电脑10;所述位置调节机构和超精密转台4并排安装在基座8的上表 面,同轴度标准器3安装在所述位置调节机构上,同轴度标准器3的信号输出端与电脑 10的信号输入端连接,增强现实眼镜9的信号输入端与电脑10的信号输出端连接。
[0025]
具体实施方式二:结合图1和图2说明本实施方式,本实施方式所述一种基于数字
孪 生技术的同轴度测量装置的所述位置调节机构包括水平导轨6和竖直导轨7,竖直导轨7 的下端与基座8的上表面固定连接,水平导轨6安装在竖直导轨7上,且水平导轨6能沿 竖直导轨7上下直线移动,同轴度标准器3安装在水平导轨6上,且同轴度标准器3能沿 水平导轨6直线往复移动。其它组成及连接关系与具体实施方式一相同。
[0026]
具体实施方式三:结合图1和图2说明本实施方式,本实施方式所述一种基于数字孪 生技术的同轴度测量装置还包括电传感器5;超精密转台4通过电传感器5与基座8的上 表面连接,电传感器5的信号输出端与电脑10的信号输入端连接。其它组成及连接关系 与具体实施方式一相同。
[0027]
具体实施方式四:结合图1和图2说明本实施方式,本实施方式所述一种基于数字孪 生和同轴度标准器的同轴度校准方法是通过如下步骤实现的:
[0028]
步骤一、将计量用同轴度标准器放置于转台中心,保证电感传感器能够测量到同轴 度标准器轮廓;
[0029]
步骤二、基于增强现实眼镜,利用虚实注册技术实现虚拟同轴度标准器和现实同轴 度标准器的配准,并将同轴度标准器测量校准流程在增强眼镜和显示屏上进行可视化;
[0030]
步骤三、电感传感器测量同轴度标准器多个截面的跳动,记录截面相对转台平面的 高度数据,并拟合出同轴度标准器的同轴度值;
[0031]
步骤四、同轴度标准器数字孪生体实时跟进同轴度标准器的轮廓数据和同轴度数据;
[0032]
步骤五、同轴度测量装置测量同轴度标准器的数值和标准器实际值进行对比,从而实 现同轴度测量装置实物和虚拟模型的精密校准。
[0033]
具体实施方式五:结合图1和图2说明本实施方式,本实施方式所述一种基于数字孪 生和同轴度标准器的同轴度校准方法的步骤二中虚实注册技术的步骤为:
[0034]
步骤a、将数字孪生中实体和虚拟模型均进行点云化处理,同时采用改进icp方法 进行点云配准;
[0035]
步骤b、确定损失函数为:
[0036][0037][0038]
公式(1)和(2)中,ny(yk)表示yk在y中的局部邻域,h表示核带宽,l
k,l
表示损 失函数值,w
l
表示权重,t(x)表示点云x经过旋转平移变换后形成的点云,y
l
表示点云 t(x)中的点,yi表示yk局部领域中的点,η表示点集的重叠率,k表示点yk在点云y中 的序号,l表示点y
l
在点云t(x)中的序号。
[0039]
工作原理
[0040]
同轴度测量装置主要依靠标准器进行量值的标定和溯源,通过计量院对同轴度标准器 的同轴度值进行测定,然后通过标准器对不同同轴度测量装置进行校准;在校准过程中, 同轴度标准器回转轴线以及测量流程无法动态可视化,使得装置校准流程不清晰,不利于 对装置校准进行分析,同时装置对应的数字孪生系统中的虚拟模型也缺少校准数据;通过 在转台上安装同轴度标准器,通过精密调控使得其和转台回转中心进行对心。同轴度
标准 器质量分布均匀且加工精度高,底面几何中心和转台中心对齐后,则等同于其轴线与转台 主轴的回转轴线同轴;基于增强现实眼镜,利用虚实注册技术实现虚拟同轴度标准器和现 实同轴度标准器的配准,并将同轴度标准器测量校准流程在增强眼镜和显示屏上进行可视 化;移动垂直导轨,使电感传感器运动到同轴度标准器径向截面;超精密转台转动,电感 传感器采集同轴度标准器截面轮廓信息,利用多个截面数据评定出同轴度标准器同轴度 值;将装置评定的同轴度值和实际值对比,以此校准同轴度测量装置数字孪生系统的系统 误差。
[0041]
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,虽然 本发明已以较佳实施例揭露如上,然而并非用以限定本发明,任何熟悉本专业的技术人员, 在不脱离本发明技术方案范围内,当可利用上述揭示的技术内容做出些许更动或修饰为等 同变化的等效实施例,但凡是未脱离本发明技术方案内容,依据本发明的技术实质,在本 发明的精神和原则之内,对以上实施例所作的任何简单的修改、等同替换与改进等,均仍 属于本发明技术方案的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1