目标车辆的定位方法、装置及车辆与流程
1.本发明涉及汽车技术领域,具体而言,涉及一种目标车辆的定位方法、装置及车辆。
背景技术:
2.随着车辆性能的不断提升,用户对于车辆的安全性和驾驶体验有了更高的要求,而如何实现对车辆的定位,是提升车辆安全性和用户驾驶体验的重要问题。
3.现有技术中,实现车辆定位的主要方法是:在车辆中设置定位系统,定位系统包含多个传感器,通过多个传感器采集数据实现定位功能。但是,上述方法的缺点是:定位系统的鲁棒性和冗余度较低,在较差的环境条件(如:光线较暗、雨水颗粒较大等)下会出现车辆的全球导航卫星系统(global navigation satellite system,gnss)信号较弱等情况,导致定位系统无法在特殊行驶场景(如:暴雨情况下的城市街道、地下停车场等)中对车辆进行定位,进而导致车辆的安全性较低,用户的驾驶体验较差。
4.针对上述的问题,目前尚未提出有效的解决方案。
技术实现要素:
5.本发明实施例提供了一种目标车辆的定位方法、装置及车辆,以至少解决由于现有技术车辆定位系统的鲁棒性和冗余度较低导致车辆安全性低和用户驾驶体验差的技术问题。
6.根据本发明其中一实施例,提供了一种目标车辆的定位方法,目标车辆装配有阵列天线和至少一个传感器,包括:
7.获取目标车辆的第一定位数据和传感数据集,其中,第一定位数据由阵列天线通过无线网络通信定位确定,传感数据集由至少一个传感器实时采集;基于第一定位数据和传感数据集,采用多交互模型预测方式计算得到目标车辆的第二定位数据;基于传感数据集和第二定位数据,采用惯性预测方式计算得到目标车辆的定位结果。
8.可选地,目标车辆的定位方法还包括:对第一定位数据和传感数据集进行初始化处理,得到初始化结果;响应于初始化结果为初始化失败,重新获取第一定位数据和传感数据集。
9.可选地,获取目标车辆的第一定位数据包括:利用阵列天线接收多个无线网络通信基站发出的下行定位参考信号;对下行定位参考信号进行信号处理,确定下行定位参考信号的波达角;基于波达角进行坐标解算,得到第一定位数据。
10.可选地,对下行定位参考信号进行信号处理,确定下行定位参考信号的波达角包括:对下行定位参考信号进行多次采样,得到下行定位参考信号的协方差矩阵;对协方差矩阵进行特征分解,得到下行定位参考信号的特征值矩阵;根据特征值矩阵,确定下行定位参考信号对应的信号子空间和噪声子空间;基于信号子空间和噪声子空间,采用预设空间谱函数进行谱峰搜索,确定下行定位参考信号的波达角。
11.可选地,基于第一定位数据和传感数据集,采用多交互模型预测方式计算得到目标车辆的第二定位数据包括:针对目标车辆对应的多个运动模型中的每个运动模型,建立多交互模型预测方式对应的第一预测规则和第一校验规则;基于第一定位数据和传感数据集,利用第一预测方程对目标车辆的位置信息进行预测,得到第一预测结果;基于第一定位数据,利用第一校验规则对第一预测结果进行校验,确定第二定位数据。
12.可选地,基于第一定位数据,利用第一校验规则对第一预测结果进行校验,得到第二定位数据包括:对第一定位数据进行野值剔除,得到剔除结果;利用剔除结果和第一校验规则计算得到第一校验值;根据第一校验值对第一预测结果进行更新,得到第二定位数据。
13.可选地,基于传感数据集和第二定位数据,采用惯性预测方式计算得到目标车辆的定位结果包括:根据目标车辆对应的惯性预测误差模型,建立多交互模型预测方式对应的第二预测规则和第二校验规则;基于传感数据集,利用第二预测方程对目标车辆的位置信息进行预测,得到第二预测结果;基于第二定位数据,利用第二校验规则对第二预测结果进行校验,得到目标车辆的定位结果。
14.可选地,基于第二定位数据,利用第二校验规则对第二预测结果进行校验,得到目标车辆的定位结果包括:利用第二定位数据和第二校验规则计算得到第二校验值;根据第二校验值对第二预测结果进行更新,得到第三定位数据;对第三定位数据进行增广状态估计,确定目标车辆的定位结果。
15.根据本发明其中一实施例,还提供了一种目标车辆的定位装置,目标车辆装配有阵列天线和至少一个传感器,包括:
16.获取模块,用于获取目标车辆的第一定位数据和传感数据集,其中,第一定位数据由阵列天线通过无线网络通信定位确定,传感数据集由至少一个传感器实时采集;计算模块,用于基于第一定位数据和传感数据集,采用多交互模型预测方式计算得到目标车辆的第二定位数据;定位模块,用于基于传感数据集和第二定位数据,采用惯性预测方式计算得到目标车辆的定位结果。
17.可选地,目标车辆的定位装置还包括:初始化模块,用于对第一定位数据和传感数据集进行初始化处理,得到初始化结果;响应于初始化结果为初始化失败,重新获取第一定位数据和传感数据集。
18.可选地,上述获取模块还用于:利用阵列天线接收多个无线网络通信基站发出的下行定位参考信号;对下行定位参考信号进行信号处理,确定下行定位参考信号的波达角;基于波达角进行坐标解算,得到第一定位数据。
19.可选地,上述获取模块还用于:对下行定位参考信号进行信号处理,确定下行定位参考信号的波达角包括:对下行定位参考信号进行多次采样,得到下行定位参考信号的协方差矩阵;对协方差矩阵进行特征分解,得到下行定位参考信号的特征值矩阵;根据特征值矩阵,确定下行定位参考信号对应的信号子空间和噪声子空间;基于信号子空间和噪声子空间,采用预设空间谱函数进行谱峰搜索,确定下行定位参考信号的波达角。
20.可选地,上述计算模块还用于:针对目标车辆对应的多个运动模型中的每个运动模型,建立多交互模型预测方式对应的第一预测规则和第一校验规则;基于第一定位数据和传感数据集,利用第一预测方程对目标车辆的位置信息进行预测,得到第一预测结果;基于第一定位数据,利用第一校验规则对第一预测结果进行校验,确定第二定位数据。
21.可选地,上述计算模块还用于:对第一定位数据进行野值剔除,得到剔除结果;利用剔除结果和第一校验规则计算得到第一校验值;根据第一校验值对第一预测结果进行更新,得到第二定位数据。
22.可选地,上述定位模块还用于:根据目标车辆对应的惯性预测误差模型,建立多交互模型预测方式对应的第二预测规则和第二校验规则;基于传感数据集,利用第二预测方程对目标车辆的位置信息进行预测,得到第二预测结果;基于第二定位数据,利用第二校验规则对第二预测结果进行校验,得到目标车辆的定位结果。
23.可选地,上述定位模块还用于:利用第二定位数据和第二校验规则计算得到第二校验值;根据第二校验值对第二预测结果进行更新,得到第三定位数据;对第三定位数据进行增广状态估计,确定目标车辆的定位结果。
24.根据本发明其中一实施例,还提供了一种车辆,车载存储器中存储有计算机程序,车载处理器被设置为运行计算机程序以执行前述任意一项目标车辆的定位方法。
25.在本发明实施例中,首先,获取目标车辆的第一定位数据和传感数据集,其中,第一定位数据由阵列天线通过无线网络通信定位确定,传感数据集由至少一个传感器实时采集;其次,基于第一定位数据和传感数据集,采用多交互模型预测方式计算得到目标车辆的第二定位数据;最后,基于传感数据集和第二定位数据,采用惯性预测方式计算得到目标车辆的定位结果,达到了通过基于车载天线的无线网络通信定位与基于传感器的传感数据进行融合定位的目的,从而实现了提高定位系统鲁棒性和冗余度、提升车辆安全性和用户驾驶体验的技术效果,进而解决了由于现有技术车辆定位系统的鲁棒性和冗余度较低导致车辆安全性低和用户驾驶体验差的技术问题。
附图说明
26.此处所说明的附图用来提供对本发明的进一步理解,构成本发明的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
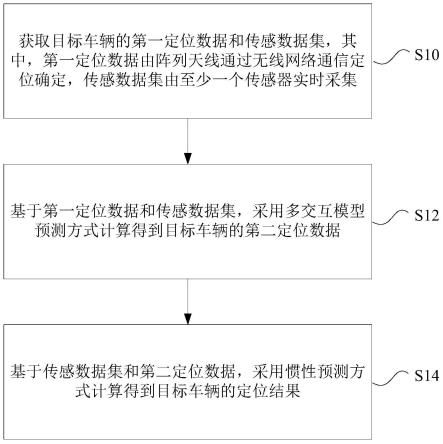
27.图1是根据本发明其中一实施例的一种目标车辆的定位方法的流程图;
28.图2是根据本发明其中一实施例的一种可选的车辆定位系统的示意图;
29.图3是根据本发明其中一实施例的一种可选的l型贴片阵列天线的示意图;
30.图4是根据本发明其中一实施例的一种可选的目标车辆的定位过程的示意图;
31.图5是根据本发明其中一实施例的一种可选的l型阵列天线几何关系的示意图;
32.图6是根据本发明其中一实施例的一种目标车辆的定位装置的结构框图。
具体实施方式
33.为了使本技术领域的人员更好地理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分的实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本发明保护的范围。
34.需要说明的是,本发明的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用
的数据在适当情况下可以互换,以便这里描述的本发明的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
35.根据本发明实施例,提供了一种目标车辆的定位方法的实施例,需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
36.该方法实施例可以在车辆中包含存储器和处理器的电子装置或者类似的运算装置中执行。以运行在车辆的电子装置上为例,车辆的电子装置可以包括一个或多个处理器(处理器可以包括但不限于中央处理器(cpu)、图形处理器(gpu)、数字信号处理(dsp)芯片、微处理器(mcu)、可编程逻辑器件(fpga)、神经网络处理器(npu)、张量处理器(tpu)、人工智能(ai)类型处理器等的处理装置)和用于存储数据的存储器。和用于存储数据的存储器。可选地,上述汽车的电子装置还可以包括用于通信功能的传输设备、输入输出设备以及显示设备。本领域普通技术人员可以理解,上述结构描述仅为示意,其并不对上述车辆的电子装置的结构造成限定。例如,车辆的电子装置还可包括比上述结构描述更多或者更少的组件,或者具有与上述结构描述不同的配置。
37.存储器可用于存储计算机程序,例如,应用软件的软件程序以及模块,如本发明实施例中的信息处理方法对应的计算机程序,处理器通过运行存储在存储器内的计算机程序,从而执行各种功能应用以及数据处理,即实现上述的信息处理方法。存储器可包括高速随机存储器,还可包括非易失性存储器,如一个或者多个磁性存储装置、闪存、或者其他非易失性固态存储器。在一些实例中,存储器可进一步包括相对于处理器远程设置的存储器,这些远程存储器可以通过网络连接至移动终端。上述网络的实例包括但不限于互联网、企业内部网、局域网、移动通信网及其组合。
38.传输装置用于经由一个网络接收或者发送数据。上述的网络具体实例可包括移动终端的通信供应商提供的无线网络。在一个实例中,传输装置包括一个网络适配器(network interface controller,简称为nic),其可通过基站与其他网络设备相连从而可与互联网进行通讯。在一个实例中,传输装置可以为射频(radio frequency,简称为rf)模块,其用于通过无线方式与互联网进行通讯。
39.显示设备可以例如触摸屏式的液晶显示器(lcd)和触摸显示器(也被称为“触摸屏”或“触摸显示屏”)。该液晶显示器可使得用户能够与移动终端的用户界面进行交互。在一些实施例中,上述移动终端具有图形用户界面(gui),用户可以通过触摸触敏表面上的手指接触和/或手势来与gui进行人机交互,此处的人机交互功能可选的包括如下交互:创建网页、绘图、文字处理、制作电子文挡、游戏、视频会议、即时通信、收发电子邮件、通话界面、播放数字视频、播放数字音乐和/或网络浏览等、用于执行上述人机交互功能的可执行指令被配置/存储在一个或多个处理器可执行的计算机程序产品或可读存储介质中。
40.在本实施例提供了一种运行于上述车辆的电子装置的目标车辆的定位方法,图1是根据本发明其中一实施例的目标车辆的定位方法的流程图,如图1所示,其特征在于,目
标车辆装配有阵列天线和至少一个传感器,该方法包括如下步骤:
41.步骤s10,获取目标车辆的第一定位数据和传感数据集,其中,第一定位数据由阵列天线通过无线网络通信定位确定,传感数据集由至少一个传感器实时采集;
42.上述目标车辆可以是多个场景下的车辆,例如,该车辆可以是:行驶在雨天马路上的车辆、行驶在隧道里的车辆、停在地下停车场的车辆等。该目标车辆还可以是自动挡汽车或手自一体汽车。特别地,上述车辆可以是无人驾驶的车辆。
43.上述第一定位数据由阵列天线通过无线网络通信定位确定。该第一定位数据的确定方式可以是:阵列天线接收多个无线网络通信基站发出的信号,对处理信号之后得到的结果进行解算从而得到第一定位数据。
44.上述传感数据集可以由传感器实时采集。该传感器数据集包含的数据可以是与车辆定位有关的数据,例如,该数据集可以包括:车辆的三轴姿态角,车辆的速度,车辆的加速度,车轮的旋转速度,车辆的行驶方向等。
45.上述阵列天线可以是十字型阵列天线,l型贴片阵列天线等。该阵列天线可以用于获取信号,例如,获取的信号可以是:定位参考信号(positioning reference signal,prs),小区参考信号(cell reference signal,crs),信道状态指示参考信号(channel state information-reference signal,csi-rs),解调参考信号(demodulation reference signal,drs)等。
46.需要说明的是,上述阵列天线可以位于目标车辆的车顶。
47.需要说明的是,十字型阵列天线和l型贴片阵列天线的坐标系建立方式不同,互相耦合的方式不同。
48.上述无线网络通信可以是4g通信,5g通信,6g通信等。
49.上述传感器可以是与车辆定位有关的传感器,例如,该传感器可以是:相机模块传感器,轮速计传感器,激光雷达传感器,罗盘传感器,惯性预测单元(inertial measurement unit,imu)传感器,gnss模块传感器等。
50.步骤s12,基于第一定位数据和传感数据集,采用多交互模型预测方式计算得到目标车辆的第二定位数据;
51.上述多交互模型预测方式可以是通过一种算法实现,该算法能够有效地对各个模型的概率进行调整,进而对目标车辆进行定位跟踪。
52.上述多交互模型预测方式中的多个模型可以是运动模型,例如,上述模型可以是:恒定速度(constant velocity,cv)模型,恒定加速度(constant acceleration,ca)模型,恒定转率和速度(constant turn rate and velocity,ctrv)模型,恒定转率和加速度(constant turn rate and acceleration,ctra)模型,常速转弯(constant turn,ct)模型等。
53.具体地,上述采用多交互模型预测方式计算得到目标车辆的第二定位数据的过程可以参照对于本发明实施例的进一步介绍,不予赘述。
54.步骤s14,基于传感数据集和第二定位数据,采用惯性预测方式计算得到目标车辆的定位结果。
55.上述惯性预测方式可以在imu模块通过一种算法来实现,其原理是:利用陀螺仪和加速度传感器测量车辆的角加速度和线加速度,并将测量数据整合起来,计算出车辆相对
于初始姿态的当前姿态信息。
56.上述目标车辆的定位结果可以是目标车辆当前的实时位置。
57.具体地,上述采用惯性预测方式计算得到目标车辆的定位结果的过程可以参照对于本发明实施例的进一步介绍,不予赘述。
58.在本发明实施例中,首先,获取目标车辆的第一定位数据和传感数据集,其中,第一定位数据由阵列天线通过无线网络通信定位确定,传感数据集由至少一个传感器实时采集;其次,基于第一定位数据和传感数据集,采用多交互模型预测方式计算得到目标车辆的第二定位数据;最后,基于传感数据集和第二定位数据,采用惯性预测方式计算得到目标车辆的定位结果,达到了通过基于车载天线的无线网络通信定位与基于传感器的传感数据进行融合定位的目的,从而实现了提高定位系统鲁棒性和冗余度、提升车辆安全性和用户驾驶体验的技术效果,进而解决了由于现有技术车辆定位系统的鲁棒性和冗余度较低导致车辆安全性低和用户驾驶体验差的技术问题。
59.图2是根据本发明其中一实施例的一种可选的车辆定位系统的示意图,如图2所示,车辆c(相当于上述目标车辆)装配有定位系统,该定位系统至少包括:全球导航卫星系统传感器,相机传感器,轮速计传感器,惯性测量单元传感器,激光雷达传感器和无线通信网络模组。
60.具体地,上述全球导航卫星系统传感器可以用于采集多个卫星信号以进行实时定位,全球导航卫星系统传感器采集的数据可以作为传感数据集的数据之一。
61.具体地,上述相机传感器可以用于采集图像信息,例如,采集的图像信息可以是:色彩,纹理,轮廓,亮度信息等,相机传感器采集的数据可以作为传感数据集的数据之一。
62.具体地,上述轮速计传感器可以用于采集目标车辆的车轮旋转速度,轮速计传感器采集的数据可以作为传感数据集的数据之一。
63.具体地,上述惯性测量单元传感器可以包含加速度计和陀螺仪,用于采集目标车辆的角速度和加速度,惯性测量单元传感器采集的数据可以作为传感数据集的数据之一。
64.上述激光雷达传感器可以由三维激光扫描仪与定位定姿系统(position and orientation system,pos)组成,可以用于在目标车辆行驶过程中,通过采集发送和接收到的激光束的时间间隔来计算周边物体距目标车辆的距离,激光雷达传感器采集的数据可以作为传感数据集的数据之一。
65.上述无线通信网络模组用于处理采集到的信号,进而得到第一定位数据。
66.图3是根据本发明其中一实施例的一种可选的l型贴片阵列天线的示意图,如图2和图3所示,车辆c还装配有阵列天线,该阵列天线可以是如图3所示的l型贴片阵列天线。
67.具体地,上述阵列天线由多个阵元组成,每个阵元之间间隔相同,阵元如图中301所示。
68.需要说明的是,上述l型贴片阵列天线引入了虚拟阵元,用于解决阵列稀布时的信号模糊问题,其中,阵列稀布是指天线阵列的阵元不等间隔排列。
69.图4是根据本发明其中一实施例的一种可选的目标车辆的定位过程的示意图,图5是根据本发明其中一实施例的一种可选的l型阵列天线几何关系的示意图,如图4所示,目标车辆的定位方法包括:
70.通过5g定位获取第一定位数据,通过传感器数据采集获得传感数据集;
71.对第一定位数据进行多交互模型预测得到定位数据1(相当于第二定位数据);
72.对定位数据1和传感数据集进行惯性预测得到目标车辆的定位结果。
73.需要说明的是,上述多模型交互预测运用了容积卡尔曼滤波(cubature kalman filter,ckf)。
74.需要说明的是,上述惯性预测运用了状态误差卡尔曼滤波(error state kalman filter,eskf)。
75.下面对本发明实施例的上述方法进行进一步介绍。
76.作为一种可选的实施方式,目标车辆的定位方法还包括以下步骤:
77.步骤s16,对第一定位数据和传感数据集进行初始化处理,得到初始化结果;
78.步骤s18,响应于初始化结果为初始化失败,重新获取第一定位数据和传感数据集。
79.在上述可选的实施方式中,初始化处理可以包括:初始定位数据检查、初始状态判断、初始状态估计等,其中,初始定位数据检查可以包括:检查5g定位获得的第一定位数据,检查传感器采集的传感数据集等,初始状态判断可以是判断车辆是否初次上电等。
80.在上述可选的实施方式中,初始化处理得到的结果可以是目标车辆的位置,速度和传感数据集等。
81.在上述可选的实施方式中,判断上述初始化结果为初始化失败的方式可以是:获取初始定位数据失败,初始状态判断结果不符合预期,初始状态估计失败等。
82.仍然如图4所示,对目标车辆进行初始化的具体实施方式可以是:车辆c装配有如图2所示的定位系统,定位系统的无线通信网络模组通过5g定位处理得到第一定位数据,其余传感器采集对应数据得到车辆c的传感数据集,获取数据完毕之后判断车辆的初始状态是否为初次上电,如果是初次上电则开始初始化处理,初始化处理成功之后进行下一步处理,否则重新开始获取第一定位数据和传感数据集。
83.容易理解的是,通过本发明的上述的可选的实施方式,对第一定位数据和传感数据集进行初始化处理,能够加快数据的处理速度,进而提升对目标车辆的定位效率。
84.作为一种可选的实施方式,上述步骤s10中,获取目标车辆的第一定位数据还包括以下步骤:
85.步骤s101,利用阵列天线接收多个无线网络通信基站发出的下行定位参考信号;
86.步骤s102,对下行定位参考信号进行信号处理,确定下行定位参考信号的波达角;
87.步骤s103,基于波达角进行坐标解算,得到第一定位数据。
88.在上述可选的实施方式中,上述阵列天线可以是如图3所示的l型贴片阵列天线,在本发明中,为了直观的了解接收信号的过程,将阵列天线几何化,图5是根据本发明其中一实施例的一种可选的l型阵列天线几何关系的示意图,如图5所示,该l型阵列可以由两个正交的均匀线阵组成,每个线性阵列包含n个阵子,每个阵子之间的间距为d,入射信号与z轴的夹角θ表示仰角,入射信号在x-o-y平面的投影与x轴的夹角表示方位角,s(t)表示入射信号。
89.在上述可选的实施方式中,上述第一定位数据可以是利用目标车辆的阵列天线,通过无线通信网络定位(如5g定位)得到的目标车辆的定位数据(例如:位置、速度、波达角等)。
90.具体地,首先利用阵列天线接收多个无线网络通信基站发出的下行定位参考信号,该下行定位参考信号可以是prs信号。
91.此处需要说明的是,在现有技术中,对车辆进行定位主要传输的是上行定位参考信号(即:终端向基站发送的信号),该方法的缺点是:信号发送缓慢,影响定位的实现速度,而本方案对车辆进行定位主要传输的是下行参考信号(基站向终端发送的信号),能够加快信号的发送速度,提升定位速度。
92.进一步地,对下行定位参考信号进行信号处理,可以是通过利用二维多重信号分类(multiple signal classification,music)方法对下行定位参考信号进行处理,以确定下行定位参考信号的波达角。
93.通常在对车辆进行定位的应用场景中,多个已知坐标信息的基站与目标车辆相关联,对此,通过上述可选的实施方式,能够获得多个基站对应的多组波达角,基于目标车辆关联的多个基站的坐标信息和多组波达角,联立方程组进行坐标解算,可以得到该阵列天线坐标系原点的绝对坐标。上述所得到的第一定位数据可以至少包括该阵列天线坐标系原点的绝对坐标。
94.仍然如图4所示,对车辆c(相当于上述目标车辆)进行融合定位的过程中,通过5g定位估计车辆c的位置坐标p1(相当于上述第一定位数据)时,可以通过上述的实施方式得到阵列天线接收到的信号,通过二维多重信号处理及坐标解算处理得到的信号进一步得到第一定位数据。
95.具体地,对5g定位中l型阵列天线接收信号的原理进一步说明如下:
96.车辆c装配的阵列天线接收k个波长为λ的远场窄带不相干信号,其中第k个信号的波达方向为其中θk为仰角,为方向角,得到x轴的接收信号模型x(t)可以表示为:x(t)=a
x
s(t)+n
x
(t),y轴的接收信号模型y(t)可以表示为:y(t)=ays(t)+ny(t)。
97.上述x(t)=[x0(t),x1(t),...,x
n-1
(t)]
t
,表示x轴方向的接收信号。
[0098]
上述y(t)=[y0(t),y1(t),...,y
n-1
(t)]
t
,表示y轴方向的接收信号。
[0099]
上述s(t)=[s0(t),s1(t),...,sk(t)]
t
,表示线性阵列接收到的信号矢量。
[0100]
上述n
x
(t)=[n
x,0
(t),n
x,1
(t),...,n
x,n-1
(t)]
t
,表示x轴方向的噪声矢量。
[0101]
上述ny(t)=[n
y,0
(t),n
y,1
(t),...,n
y,n-1
(t)]
t
,表示y轴方向的噪声矢量。
[0102]
上述表示x轴方向上子阵的阵列流形,进一步地,是x轴方向上每个阵子接收到的第k个信号的总体表示,其中x轴方向上第n个阵子接收到的第k个信号可以用来表示,n=0,1,...,n-1。
[0103]
上述表示y轴方向上子阵的阵列流形,进一步地,是y轴方向上每个阵子接收到的第k个信号的总体表示,其中y轴方向上第n个阵子接收到的第k个信号可以用来表示,n=0,1,...,n-1。
[0104]
通过对上述多个参数的处理,得到最终l型阵列接收信号,可以表示为:
其中,n(t)=[n
x
(t) ny(t)]
t
是加性高斯白噪音,a=[a
x ay]
t
为l型阵列接收信号的阵列流形。
[0105]
重复进行上述步骤即可接收多个无线网络通信基站发出的下行定位参考信号。
[0106]
需要说明的是,上述x(t)和y(t)可以直接从无线通信网络模组物理层获取。
[0107]
进一步地,作为一种可选的实施方式,在上述步骤s104中,对下行定位参考信号进行信号处理,确定下行定位参考信号的波达角还可以包括以下步骤:
[0108]
步骤s1041,对下行定位参考信号进行多次采样,得到下行定位参考信号的协方差矩阵;
[0109]
步骤s1042,对协方差矩阵进行特征分解,得到下行定位参考信号的特征值矩阵;
[0110]
步骤s1043,根据特征值矩阵,确定下行定位参考信号对应的信号子空间和噪声子空间;
[0111]
步骤s1044,基于信号子空间和噪声子空间,采用预设空间谱函数进行谱峰搜索,确定下行定位参考信号的波达角。
[0112]
在上述可选地实施方式中,多次采样可以是对于信号传输的多次采样,由于无线网络通信模组中每个天线振子都会对应一个通道,无线网络通信模组对通道都有一定的采样频率,所以在本发明中可以取无线网络通信模组固有的采样频率,或者通过增采样或降采样获得所需采样。
[0113]
在上述可选的实施方式中,信号子空间可以由特征值矩阵中与信号对应的特征向量组成。
[0114]
在上述可选的实施方式中,噪声子空间可以由特征值矩阵中所有的最小特征值对应的特征向量组成。
[0115]
在上述可选的实施方式中,空间谱函数可以是关于变量θ和
[0116]
在上述可选的实施方式中,谱峰搜索的目的可以是寻找空间谱函数的极大值,可以采取对θ,进行遍历搜索的方式找到空间谱函数的极大值,进而确定下行定位参考信号的波达角。
[0117]
具体地,对5g定位中二维多重信号处理及坐标解算的原理进一步说明如下:
[0118]
从无线通信网络模组物理层获取信道矩阵根据m次采样可得到接收信号协方差矩阵的估计矩阵为:当m接近无穷大时,接收信号的协方差矩阵的估计矩阵逼近接收信号的协方差矩阵,该协方差矩阵可以表示为:
[0119]rx
=e{z(t)zh(t)}
[0120]
=e{[as(t)+n(t)][as(t)+n(t)]h}
[0121]
=ae{s(t)sh(t)}ah+e{n(t)nh(t)}
[0122]
=ar
sah
+rn。
[0123]
上述协方差矩阵中,rs=e{s(t)sh(t)},表示信号矢量的协方差矩阵。
[0124]
上述协方差矩阵中,矩阵ah表示矩阵a的共轭转置矩阵。
[0125]
上述协方差矩阵中,rn=σ2i,表示噪声的协方差矩阵,其中,σ2表示噪声的功率,i表示单位矩阵。
[0126]
对协方差矩阵进行特征分解得到特征值矩阵r
x
=usσ
suhs
+unσnu
hn
,其中,σs表示特征值矩阵中前k个较大特征值构成的对角阵,us表示信号子空间,上述矩阵ah表示信号子空间的导向矢量,σn表示除k个较大特征值之外的2n-k个较小特征值构成的对角阵,un表示噪声子空间,un=[ν
k+1
,ν
k+2
,...,ν
2n
]。
[0127]
将信号子空间和噪声子空间代入预设空间谱函数pm得到下行定位参考信号的波达角,其中,空间谱函数可以表示为:
[0128]
将多个基站绝对坐标转换到无线通信网络模组坐标系下,并根据已经测得的θ和构建多个方程,最后将旋转和平移求出,然后再将无线通信网络模组根据旋转和平移逆运算转换到绝对坐标中,获得无线通信网络模组的绝对位置,即:阵列天线坐标系原点的绝对坐标,进而得到第一定位数据。
[0129]
需要说明的是,上述信号子空间的导向矢量与噪声子空间正交,即:ahun=0。
[0130]
容易理解的是,通过5g定位估计车辆c的位置信息的有益效果为:可以提高车辆定位系统的鲁棒性和冗余度,可以不受特殊环境(如:下雨天的高速公路,地下停车场等)或者特殊状况(gnss信号较弱等)的影响,进而提高定位的精度。
[0131]
作为一种可选的实施例,上述步骤s12中,基于第一定位数据和传感数据集,采用多交互模型预测方式计算得到目标车辆的第二定位数据还包括以下步骤:
[0132]
步骤s121,针对目标车辆对应的多个运动模型中的每个运动模型,建立多交互模型预测方式对应的第一预测规则和第一校验规则;
[0133]
步骤s122,基于第一定位数据和传感数据集,利用第一预测方程对目标车辆的位置信息进行预测,得到第一预测结果;
[0134]
步骤s123,基于第一定位数据,利用第一校验规则对第一预测结果进行校验,确定第二定位数据。
[0135]
在上述可选的实施方式中,运动模型可以包括cv模型,ca模型和ct模型,其中,cv模型对应着车辆速度恒定的情形,ca模型对应着车辆速度发生变化的情形,ct对应着车辆方向角变化运动的情形。
[0136]
具体地,上述多交互模型预测可以是:将各模型对应的模型初始最优估计状态作为各模型的输入,经过输入交互和容积卡尔曼滤波的过程得到最终的融合输出。
[0137]
在上述可选的实施方式中,第一预测规则可以根据上述通过无线网络通信定位获得的目标车辆的定位数据建立,其中,目标车辆的定位数据可以是:目标车辆的位置,目标车辆的速度等。
[0138]
在上述可选的实施方式中,第一校验规则可以根据上述通过二维多重信号处理和坐标解算得到的无线通信网络模组的绝对位置(相当于第一定位数据)建立。
[0139]
在上述可选的实施方式中,第一预测方程根据第一预测规则建立。
[0140]
仍然如图4所示,对车辆c进行融合定位的过程中,通过多交互模型预测方式估计车辆c的位置坐标p2(相当于上述第二定位数据)时,需要先判断目标车辆是否为初次上电
且初始化处理是否成功,成功之后则根据5g定位获得的第一定位数据进行多交互模型预测并更新预测结果,进而得到目标车辆的定位数据1(相当于上述第二定位数据),估计出车辆c的位置坐标p2。
[0141]
需要说明的是,当检测到目标车辆不是初次上电的状态,则先进行预测结果更新,再进行多交互模型预测。
[0142]
具体地,对多交互模型预测的原理进一步说明如下:
[0143]
根据目标车辆的位置和速度确定第一预测规则,进一步建立第一预测方程,第一预测方程具体可以表示为:x(k+1)=φj(k)x(k)+wj(k),j=1,2,3,其中,φj(k)是模型j在k时刻的状态转移矩阵,wj(k)是均值为零,协方差矩阵为qj的白噪声。
[0144]
根据解算得到的目标车辆的车辆位置建立第一校验规则,第一校验规则具体可以表示为:zj(k)=hj(k)x(k)+vj(k),其中,hj(k)是模型j在k时刻的测量矩阵,vj(k)是均值为零,协方差矩阵为r的白噪声。
[0145]
模型i在k-1时刻的状态最优估计值为模型i在k-1时刻的概率为μi(k-1),基于最优估计值为和该概率μi(k-1),由全概率公式和贝叶斯法则可得到最优估计值与模型j匹配的滤波器的混合初始化条件,该混合初始化条件可以是满足如下关系:其中,其中,μ
i|j
(k-1|k-1)是模型i到j的相关性系数,其中,是模型j的预测概率,p
ij
是模型转移概率。
[0146]
进一步地,根据混合初始化条件可以得到其对应的协方差矩阵,协方差矩阵可以表示为:
[0147]
上述模型转移概率p
ij
由马尔可夫矩阵确定,马尔可夫矩阵的具体表示可以为:其中,p
ij
是模型i到j的转移概率。
[0148]
需要说明的是,上述混合初始化条件即为第一预测结果。
[0149]
基于混合初始状态估计和协方差矩阵p
j0
(k-1|k-1)及测量值z(k)进行滤波,其中,容积卡尔曼滤波过程的具体实施方式可以是:pj(k|k-1)=φj(k-1)p
j0
(k-1|k-1)φj(k-1)
t
+qj(k-1);进一步可以得到,k时刻模型j对应的滤波器输出的系统估计矩阵:协方差矩阵pj(k|k)=pj(k|k-1)-kj(k)sj(k)kj(k)
t
;对每个模型都进行上述步骤s122和容积卡尔曼滤波过程,得到每个模型对应的处理结果(k时刻模型对应的滤波器输出的系统估计矩阵和系统估计矩阵的协方差矩阵),将处理结果进行组
合,确定第二定位数据,组合过程可以表示为:其中,r=3,为k时刻多模型交互预测所得到的最终输出结果,进一步地,其中r=3,p(k|k)为最终输出结果的协方差矩阵。
[0150]
需要说明的是,进行容积卡尔曼滤波是为了排除非线性因素的影响,例如,非线性因素可以是:状态量的乘积,状态量的死区等。
[0151]
需要说明的是,即为第二定位数据。
[0152]
进一步地,作为一种可选的实施方式,上述步骤s123基于第一定位数据,利用第一校验规则对第一预测结果进行校验,确定第二定位数据还可以包括以下步骤:
[0153]
步骤s1231,对第一定位数据进行野值剔除,得到剔除结果;
[0154]
步骤s1232,利用剔除结果和第一校验规则计算得到第一校验值;
[0155]
步骤s1233,根据第一校验值对第一预测结果进行更新,得到第二定位数据。
[0156]
在上述可选的实施方式中,野值剔除可以是剔除5g定位结果中非直达径的无线信号对应的数值。
[0157]
在上述可选的实施方式中,计算得到第一校验值的方式可以是:将野值剔除之后的第一定位数据作为模型当前时刻的最优状态估计值,代入第一校验规则得到新的第一校验值。
[0158]
在上述可选的实施方式中,对第一预测结果更新可以是通过更新模型在当前时刻的概率进一步更新第一预测结果。
[0159]
仍然如图4所示,对车辆c进行融合定位的过程中,通过确定第二定位数据进而估计目标车辆的位置坐标p2时,首先需要判断车辆是否为初次上电,如果不是初次上电则进行第一定位数据野值剔除,之后再进行预测结果更新,得到第二定位数据进一步估计目标车辆的位置坐标p2。
[0160]
具体地,对第一预测结果更新的原理进一步说明如下:
[0161]
根据观测z(k)的似然函数λj(k)和模型j的预测概率更新得到k时刻模型j的概率其中,观测z(k)的似然函数sj(k)为预测量测协方差;通过更新后的模型j的概率进一步更新第一预测结果,再进行卡尔曼滤波得到k时刻模型j对应的滤波器输出的系统估计矩阵和协方差矩阵;更新每一个模型对应的滤波器输出的系统估计矩阵和协方差矩阵;更新之后,将各模型对应的滤波器输出的系统估计矩阵和协方差矩阵进行混合得到k时刻多交互模型预测的最终输出结果,得到第二定位数据。
[0162]
作为一种可选地实施例,上述步骤s14中基于传感数据集和第二定位数据,采用惯性预测方式计算得到目标车辆的定位结果还包括以下步骤:
[0163]
步骤s141,根据目标车辆对应的惯性预测误差模型,建立多交互模型预测方式对应的第二预测规则和第二校验规则;
[0164]
步骤s142,基于传感数据集,利用第二预测方程对目标车辆的位置信息进行预测,得到第二预测结果;
[0165]
步骤s143,基于第二定位数据,利用第二校验规则对第二预测结果进行校验,得到目标车辆的定位结果。
[0166]
在上述可选的实施方式中,惯性预测误差模型可以由技术人员在实施本发明之前进行预先规定。
[0167]
在上述可选的实施方式中,第二预测规则可以根据系统状态方程建立。
[0168]
在上述可选的实施方式中,第二校验规则可以根据5g定位获得的目标车辆的位置和目标车辆的速度建立。
[0169]
在上述可选的实施方式中,第二预测方程可以根据第二预测规则建立。
[0170]
在上述可选的实施方式中,第二预测结果可以是惯性预测结果。
[0171]
仍然如图4所示,对车辆c进行融合定位的过程中,通过惯性预测误差模型估计车辆c的位置坐标p3时,需要先判断目标车辆是否为初次上电且初始化处理是否成功,成功则将目标车辆的传感数据集作为惯性预测过程的输入,再进行接下来的步骤处理得到p3。
[0172]
具体地,对惯性预测的原理进一步说明如下:
[0173]
根据系统状态方程确定第二预测规则进一步确定第二预测方程,第二预测方程可以表示为:其中,系统状态方程根据系统的选取状态建立。
[0174]
具体地,系统状态方程建立的具体实施过程可以是:选取状态,例如:选取的状态可以为δx=[δp δv δθ δa
b δω
b δg]
t
,其中,δp表示位置误差,δv表示速度误差,δθ表示姿态角误差,δab表示加速度偏差误差,δωb表示角速度偏差误差,δg表示重力加速度误差;令um=[a
m ωm]
t
,其中am表示加速度计测量值,ωm表示角速度测量值;令υ=[ν
υ θ
υ a
υ ω
υ
]
t
,其中,υ为扰动量,ν
υ
为速度扰动,θ
υ
为姿态角扰动,a
υ
为加速度扰动,ω
υ
为角速度扰动;最终得到系统状态方程δx
←
f(x,δx,um,υ)=f
x
(x,um)
·
δx+f
υ
·
υ。
[0175]
进一步地,根据系统状态方程还可以给出系统状态方程的协方差矩阵,协方差矩阵具体表示为:其中,f
x
的矩阵表示如下:
[0176][0177]
其中,f
υ
的矩阵表达如下:
[0178][0179]
其中,q
υ
的矩阵表达如下:
[0180][0181]
需要说明的是,q
υ
可以通过imu参数信息初步获取,q
υ
为imu对应的加速度计和陀螺仪的随机游走高斯白噪声。
[0182]
具体地,作为一种可选的实施方式,在上述步骤s143中,基于第二定位数据,利用第二校验规则对第二预测结果进行校验,得到目标车辆的定位结果还包括以下步骤:
[0183]
步骤s1431,利用第二定位数据和第二校验规则计算得到第二校验值;
[0184]
步骤s1432,根据第二校验值对第二预测结果进行更新,得到第三定位数据;
[0185]
步骤s1433,对第三定位数据进行增广状态估计,确定目标车辆的定位结果。
[0186]
在上述可选的实施方式中,第二校验规则可以是技术人员提前规定好的,例如,第二校验规则可以是:其中,为高斯白噪声,服从
[0187]
在上述可选的实施方式中,第二校验值可以包括观测值,卡尔曼增益,观测误差,卡尔曼增益的协方差矩阵等。
[0188]
在上述可选的实施方式中,第三定位结果可以是基于第二定位数据和第二预测结果混合得到的。
[0189]
在上述可选的实施方式中,增广状态估计可以将第三定位数据作为状态变量,使得目标车辆的定位结果更加的精确。
[0190]
仍然如图4所示,对车辆c进行融合定位的过程中,通过惯性预测误差模型估计车辆c的位置坐标p3时,惯性预测过程完毕之后,将惯性预测得到的结果进行预测结果更新,得到定位数据2(相当于第三定位数据),进一步估计得到目标车辆的位置坐标p3。
[0191]
需要说明的,如果目标车辆不是初次上电的状态则先进行预测结果更新再进行惯性预测。
[0192]
仍然如图4所示,对车辆c进行融合定位的过程中,得到最终目标定位的位置坐标p4时,对定位数据2进行增广状态估计,进一步得到目标定位的位置坐标p4。
[0193]
具体地,对更新第二预测结果的原理进一步说明如下:
[0194]
根据第二定位数据和第二校验规则计算得到第二校验值,其中,观测值卡尔曼增益k=ph
t
(hph
t
+v)-1
,观测误差卡尔曼增益矩阵p
←
(i-kh)p(i-kh)
t
+kvk
t
。
[0195]
需要说明的是,h为第二预测规则的雅克比矩阵,进一步地,h
x
的表达式为:x
δx
的矩阵表示为:
[0196][0197]
根据第二校验值中的观测误差更新第二预测规则,进而更新第二预测结果。
[0198]
需要说明的是,上述惯性预测及预测结果更新的过程用到了误差状态卡尔曼滤波(error state kalman filter,eskf)。
[0199]
综上所述,本发明提供的目标车辆的定位方法其有益效果至少在于:可以提高定位精度,促进车路协同发展;可以提供gnss失锁情况下的伪gnss功能或者在gnss失锁情况下与其他传感器深度融合进行定位;贴片阵列天线的使用可以节约成本,提高车辆的美观度;有利于汽车领域中具体场景下的应用。
[0200]
在本实施例中,还提供了一种目标车辆的定位的定位装置,该装置用于实现上述实施例及优选实施方式,已经进行过说明的不再赘述。如以下所使用的,术语“模块”可以实现预定功能的软件和/或硬件的组合。尽管以下实施例所描述的装置较佳地以软件来实现,但是硬件,或者软件和硬件的组合的实现也是可能并被构想的。
[0201]
图6是根据本发明其中一实施例的一种车辆控制装置的结构框图,如图6所示,该装置包括:获取模块61,用于获取目标车辆的第一定位数据和传感数据集,其中,第一定位数据由阵列天线通过无线网络通信定位确定,传感数据集由至少一个传感器实时采集;计算模块62,用于基于第一定位数据和传感数据集,采用多交互模型预测方式计算得到目标车辆的第二定位数据;定位模块63,用于基于传感数据集和第二定位数据,采用惯性预测方式计算得到目标车辆的定位结果。
[0202]
可选地,目标车辆的定位装置还包括:初始化模块(图中未示出),用于对第一定位数据和传感数据集进行初始化处理,得到初始化结果;响应于初始化结果为初始化失败,重新获取第一定位数据和传感数据集。
[0203]
可选地,上述获取模块61还用于:利用阵列天线接收多个无线网络通信基站发出的下行定位参考信号;对下行定位参考信号进行信号处理,确定下行定位参考信号的波达角;基于波达角进行坐标解算,得到第一定位数据。
[0204]
可选地,上述获取模块61还用于:对下行定位参考信号进行信号处理,确定下行定位参考信号的波达角包括:对下行定位参考信号进行多次采样,得到下行定位参考信号的
协方差矩阵;对协方差矩阵进行特征分解,得到下行定位参考信号的特征值矩阵;根据特征值矩阵,确定下行定位参考信号对应的信号子空间和噪声子空间;基于信号子空间和噪声子空间,采用预设空间谱函数进行谱峰搜索,确定下行定位参考信号的波达角。
[0205]
可选地,上述计算模块62还用于:针对目标车辆对应的多个运动模型中的每个运动模型,建立多交互模型预测方式对应的第一预测规则和第一校验规则;基于第一定位数据和传感数据集,利用第一预测方程对目标车辆的位置信息进行预测,得到第一预测结果;基于第一定位数据,利用第一校验规则对第一预测结果进行校验,确定第二定位数据。
[0206]
可选地,上述计算模块62还用于:对第一定位数据进行野值剔除,得到剔除结果;利用剔除结果和第一校验规则计算得到第一校验值;根据第一校验值对第一预测结果进行更新,得到第二定位数据。
[0207]
可选地,上述定位模块63还用于:根据目标车辆对应的惯性预测误差模型,建立多交互模型预测方式对应的第二预测规则和第二校验规则;基于传感数据集,利用第二预测方程对目标车辆的位置信息进行预测,得到第二预测结果;基于第二定位数据,利用第二校验规则对第二预测结果进行校验,得到目标车辆的定位结果。
[0208]
可选地,上述定位模块63还用于:利用第二定位数据和第二校验规则计算得到第二校验值;根据第二校验值对第二预测结果进行更新,得到第三定位数据;对第三定位数据进行增广状态估计,确定目标车辆的定位结果。
[0209]
需要说明的是,上述各个模块是可以通过软件或硬件来实现的,对于后者,可以通过以下方式实现,但不限于此:上述模块均位于同一处理器中;或者,上述各个模块以任意组合的形式分别位于不同的处理器中。
[0210]
本发明的实施例还提供了一种车辆,车载存储器中存储有计算机程序,车载处理器被设置为运行计算机程序以执行上述任一项方法实施例中的步骤。
[0211]
可选地,在本实施例中,上述车载存储器可以被设置为存储用于执行以下步骤的计算机程序:
[0212]
步骤s10,获取目标车辆的第一定位数据和传感数据集,其中,第一定位数据由阵列天线通过无线网络通信定位确定,传感数据集由至少一个传感器实时采集;
[0213]
步骤s12,基于第一定位数据和传感数据集,采用多交互模型预测方式计算得到目标车辆的第二定位数据;
[0214]
步骤s14,基于传感数据集和第二定位数据,采用惯性预测方式计算得到目标车辆的定位结果。
[0215]
可选地,在本实施例中,上述车载处理器可以被设置为通过计算机程序执行以下步骤:
[0216]
步骤s10,获取目标车辆的第一定位数据和传感数据集,其中,第一定位数据由阵列天线通过无线网络通信定位确定,传感数据集由至少一个传感器实时采集;
[0217]
步骤s12,基于第一定位数据和传感数据集,采用多交互模型预测方式计算得到目标车辆的第二定位数据;
[0218]
步骤s14,基于传感数据集和第二定位数据,采用惯性预测方式计算得到目标车辆的定位结果。
[0219]
可选地,本实施例中的具体示例可以参考上述实施例及可选实施方式中所描述的
示例,本实施例在此不再赘述。
[0220]
上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
[0221]
在本发明的上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详述的部分,可以参见其他实施例的相关描述。
[0222]
在本技术所提供的几个实施例中,应该理解到,所揭露的技术内容,可通过其它的方式实现。其中,以上所描述的装置实施例仅仅是示意性的,例如单元的划分,可以为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,单元或模块的间接耦合或通信连接,可以是电性或其它的形式。
[0223]
作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
[0224]
另外,在本发明各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。上述集成的单元既可以采用硬件的形式实现,也可以采用软件功能单元的形式实现。
[0225]
集成的单元如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的全部或部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可为个人计算机、服务器或者网络设备等)执行本发明各个实施例方法的全部或部分步骤。而前述的存储介质包括:u盘、只读存储器(rom,read-only memory)、随机存取存储器(ram,random access memory)、移动硬盘、磁碟或者光盘等各种可以存储程序代码的介质。
[0226]
以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1