基于激光雷达的道路信息生成方法及系统与流程
本发明涉及数据识别,更具体地,涉及基于激光雷达的道路信息生成方法及系统。
背景技术:
1、随着电力电子技术的发展越来越多的传感器设备能够接入到道路信息分析过程中,现有的技术主要基于摄像头探测车道线等信息进行车道线位置、车道宽度等的在线采集和分析。
2、在本发明技术之前,现有技术,受限于常用摄像头为被动光学仪器,无主动光源,且面临实时环境变化大的情况,导致相同车道线探测数据差距较大,在夜晚或某些光源不足或光源过强造成过曝等情况下造成无法探测、无法精确测距、探测的车道线存在损毁或污染、数据存在误差导致精度不足等问题同时考虑到自动驾驶、v2x及更多智能驾驶相关或特殊情况场景,对于车道、灯杆、车站等需求更高的科技设备,可以补充以辅助实现更高精度的定位或完成其它特殊任务等。
技术实现思路
1、鉴于上述问题,本发明提出了基于激光雷达的道路信息生成方法及系统,在道路固定位置部署的激光雷达或移动载体搭载的激光雷达,主动探测并获取覆盖区域的回波数据,接收数据后,经过预设的参数和算法将采集数据“翻译”为道路相关信息。
2、根据本发明实施例第一方面,提供基于激光雷达的道路信息生成方法。
3、在一个或多个实施例中,优选地,所述基于激光雷达的道路信息生成方法包括:
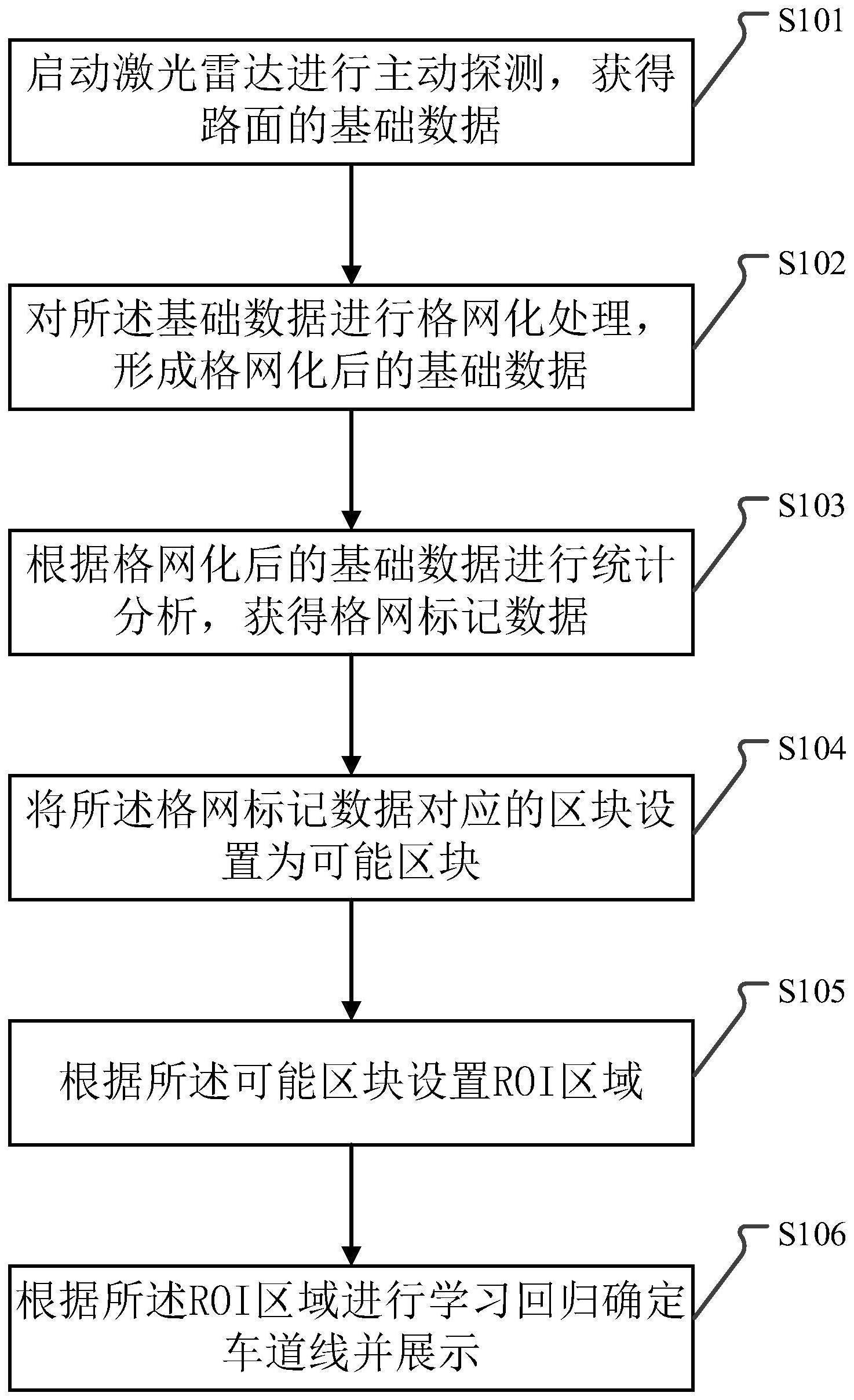
4、启动激光雷达进行主动探测,获得路面的基础数据;
5、对所述基础数据进行格网化处理,形成格网化后的基础数据;
6、根据格网化后的基础数据进行统计分析,获得格网标记数据;
7、将所述格网标记数据对应的区块设置为可能区块;
8、根据所述可能区块设置roi区域;
9、根据所述roi区域进行学习回归确定车道线并展示。
10、在一个或多个实施例中,优选地,所述启动激光雷达进行主动探测,获得路面的基础数据,具体包括:
11、启动激光雷达进行主动探测路面;
12、获取反射回来的回波并记录反射物体坐标、回波强度、收到回波的时间、扫描角度和回波次数,作为目标路面信息;
13、根据设定状态判断静态还是动态工作模式;
14、当采集设备不为静态时,将所述目标路面信息传递校正模块进行运动补偿后再进行强度补偿;
15、当采集设备为静态时,将所述目标路面信息传递校正模块进行强度补偿;
16、保持强度补偿后的数据为基础数据。
17、在一个或多个实施例中,优选地,所述对所述基础数据进行格网化处理,形成格网化后的基础数据,具体包括:
18、将路面划分为格网区域,并基于设定的坐标系原点构建格网坐标系;
19、将所述基础数据依次划分到对应的格网中,并赋予每个格网一个id号,形成所述格网化后的基础数据。
20、在一个或多个实施例中,优选地,所述根据格网化后的基础数据进行统计分析,获得格网标记数据,具体包括:
21、对所述格网化后的基础数据利用第一计算公式进行判断;
22、当不满足第一计算公式时,则将对应数据滤除,更新所述格网化后的基础数据;
23、当满足第一计算公式时,继续利用第二计算公式判断是否高于预设的高度阈值,将格网内高于预设的所述高度阈值的数据滤除,更新所述格网化后的基础数据;
24、根据更新后的格网化后的基础数据,进行每个格网的高度方差和强度方差计算;
25、根据每个格网的高度方差和强度方差仅标记满足第三计算公式和第四计算公式的数据,作为格网标记数据;
26、所述第一计算公式为:
27、i1≥c1
28、其中,i1为进过格网化处理后每一个格网的统计强度,c1为已设定好的强度阈值;
29、所述第二计算公式为:
30、z>c2
31、其中,z为进过格网化处理后每一个格网的统计高度,c2为高度阈值;
32、所述第三计算公式为:
33、istd<c3
34、其中,istd为强度方差,c3为强度方差阈值;
35、所述第四计算公式为:
36、zstd<c4
37、其中,zstd为高度方差,c4为高度方差阈值。
38、在一个或多个实施例中,优选地,所述将所述格网标记数据对应的区块设置为可能区块,具体包括:
39、将所述格网标记数据对应的区块设置为车道线区块;
40、将所述车道线区块作为所述可能区块。
41、在一个或多个实施例中,优选地,所述根据所述可能区块设置roi区域,具体包括:
42、提取所述车道线区块相邻的区块,作为可能探测区域;
43、根据经验和预设规则在所述可能探测区域内的roi区域。
44、在一个或多个实施例中,优选地,所述根据所述roi区域进行学习回归确定车道线并展示,具体包括:
45、获取所述roi区域后,将所述roi区域内的数据记录并转化为张量形式的数据;
46、提取所述张量形式的数据中的空间信息和强度信息;
47、利用经过训练的3d卷积网络进行边界点计算,获得车道线宽度、车道中心线位置、车道线总长度和车辆到该车道线的距离;
48、将所述边界点作为车道线信息转化到车辆自身坐标系,并标记车道线位置。
49、根据本发明实施例第二方面,提供基于激光雷达的道路信息生成系统。
50、在一个或多个实施例中,优选地,所述基于激光雷达的道路信息生成系统包括:
51、采集与校正模块,用于启动激光雷达进行主动探测,获得路面的基础数据;
52、格网化处理模块,用于对所述基础数据进行格网化处理,形成格网化后的基础数据;
53、统计分析模块,用于根据格网化后的基础数据进行统计分析,获得格网标记数据;
54、可能区块分析模块,用于将所述格网标记数据对应的区块设置为可能区块;
55、标记区块分析模块,用于根据所述可能区块设置roi区域;
56、学习回归模块,用于根据所述roi区域进行学习回归确定车道线并展示。
57、根据本发明实施例第三方面,提供一种计算机可读存储介质,其上存储计算机程序指令,所述计算机程序指令在被处理器执行时实现如本发明实施例第一方面中任一项所述的方法。
58、根据本发明实施例第四方面,提供一种电子设备,包括存储器和处理器,所述存储器用于存储一条或多条计算机程序指令,其中,所述一条或多条计算机程序指令被所述处理器执行以实现本发明实施例第一方面中任一项所述的方法。
59、本发明的实施例提供的技术方案可以包括以下有益效果:
60、本发明方案中,利用强度数据快速定位和高精度分析边界,而不是主要使用空间信息,经过预设的参数和算法将采集数据“翻译”为道路相关信息。
61、本发明方案中,基于激光雷达而不是传统的摄像头,实现具体距离信息的获取。
62、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
63、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!