一种具有安装角度误差自修正功能的3D扫描雷达的制作方法
本技术实施例涉及雷达,尤其涉及一种具有安装角度误差自修正功能的3d扫描雷达。
背景技术:
1、3d扫描雷达兼具安全、高效和环保等诸多优势,因而在料仓或料罐中物料的扫描监测过程中得到了广泛的推广与应用。
2、目前,现有3d扫描雷达大多直接设置在料仓或料罐顶部的开口处,3d扫描雷达与物料表面之间的距离偏大,测量精度较差。另外,现有3d扫描雷达的安装要求严苛,需要保证3d扫描雷达的安装姿态完全处于水平或竖直状态,然而,受限于现场的安装条件,3d扫描雷达往往无法实现预期的安装效果,再加之3d扫描雷达安装在料仓或料罐内部的昏暗空间内,安装人员也难以通过肉眼发现3d扫描雷达安装侧偏等情况,这就导致虽然安装人员会定期对3d扫描雷达进行检修,但也无法保证3d扫描雷达实时处于水平或竖直状态;即便3d扫描雷达安装姿态符合要求,3d扫描雷达出厂时内部元件的安装姿态也可能存在偏差,同时,经过长时间的运行,3d扫描雷达内部元件老化失准,也会使得3d扫描雷达工作于误差之下,严重影响3d扫描雷达的测量精度。除此以外,现有3d扫描雷达也无法在自身出现偏差后,及时对安装人员进行提醒和警示。
技术实现思路
1、本实用新型实施例提供一种具有安装角度误差自修正功能的3d扫描雷达,以降低3d扫描雷达的测量误差,提升3d扫描雷达的测量精度。
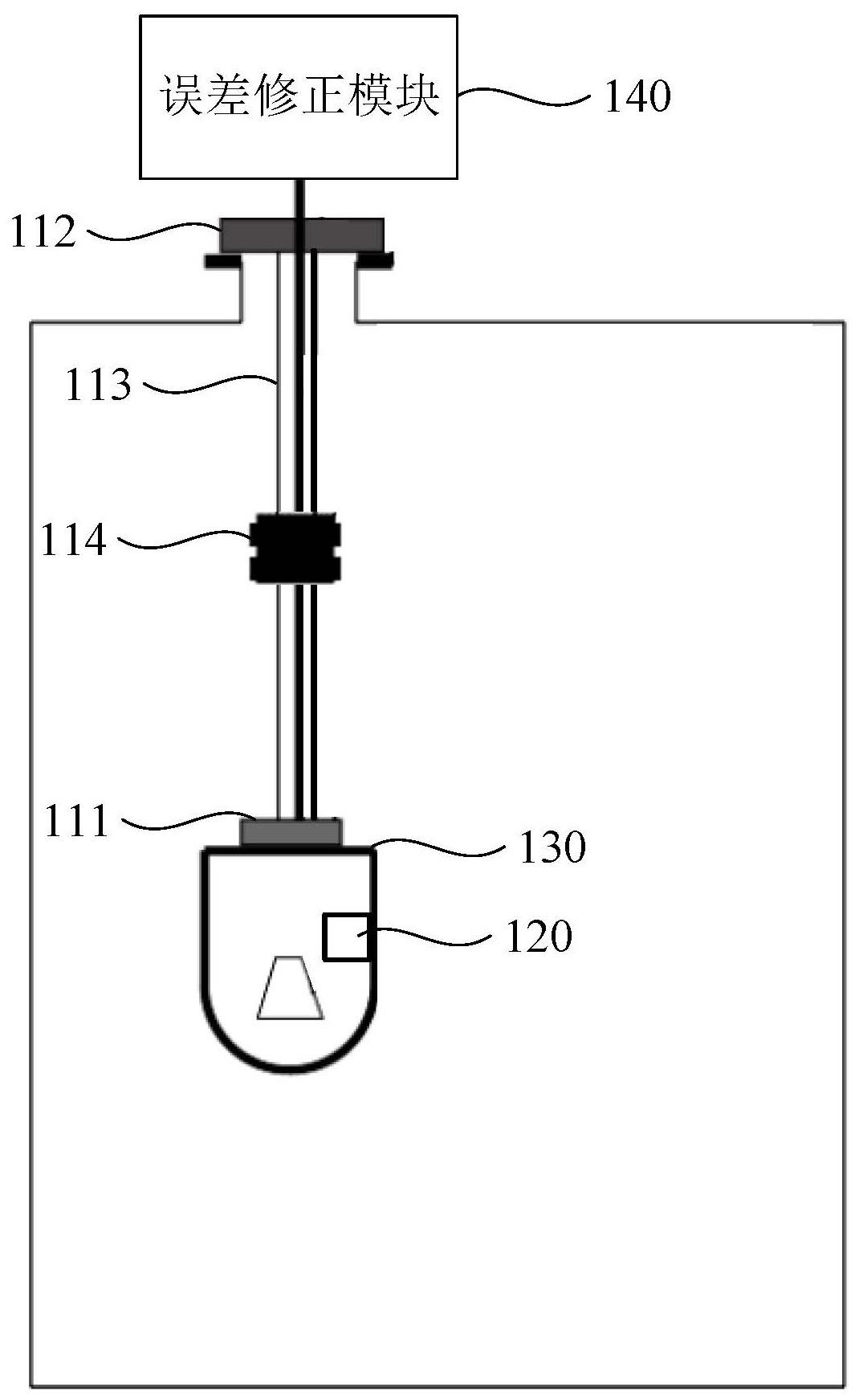
2、本实用新型实施例提供了一种具有安装角度误差自修正功能的3d扫描雷达,所述3d扫描雷达用于检测目标容器内待测介质表面的三维形态,所述3d扫描雷达包括下沉安装件、安装角度测量模块、雷达主体、误差修正模块和报警模块;
3、所述下沉安装件,连接在所述雷达主体和目标容器之间,用于将所述雷达主体安装在所述目标容器中;
4、所述安装角度测量模块与所述雷达主体相互独立,并安装在所述雷达主体的内部;所述安装角度测量模块用于检测所述雷达主体的实际角度信息,并将所述实际角度信息传输至所述雷达主体;其中,所述安装角度测量模块的数量至少是一个;
5、所述雷达主体,用于生成并发射具有至少一个预设角度的测量信号,接收所述具有至少一个预设角度的测量信号经所述待测介质反射后对应形成的至少一个回波信号,并根据所述至少一个回波信号获取对应的至少一个测距信息;以及,将所述预设角度、所述测距信息和所述实际角度信息传输至所述误差修正模块;
6、所述误差修正模块,与所述雷达主体建立通讯连接,用于获取所述雷达主体的预设安装信息,并通过所述预设安装信息、所述预设角度和所述实际角度信息,对所述雷达主体的角度信息进行修正,确定所述雷达主体的实际测量信号发射角度;以及,利用所述实际测量信号发射角度、所述测距信息和所述预设安装信息获得并显示所述待测介质的信息参数和所述待测介质的表面三维形态图;
7、所述报警模块,与所述误差修正模块连接,用于在所述预设安装信息与实际安装角度信息之间的差别,和/或,所述预设角度与所述实际测量信号发射角度之间的差别满足预设报警条件时,发出报警信号。
8、可选地,所述安装角度测量模块具体用于根据传感器的倾角、角速度和/或加速度检测所述雷达主体在俯仰方向上的实际角度信息。
9、可选地,所述安装角度测量模块具体用于根据磁场检测所述雷达主体在水平方向上的实际角度信息。
10、可选地,所述下沉安装件包括第一端部连接件、第二端部连接件和至少一个杆径;
11、所述第一端部连接件与所述雷达主体固定连接,所述第二端部连接件与所述目标容器固定连接,所述至少一个杆径将所述第一端部连接件和所述第二端部连接件连于一体。
12、可选地,所述至少一个杆径均为内部中空结构,所述第一端部连接件和所述第二端部连接件设有通孔,以容纳所述雷达主体正常工作所需的线缆,构成供电和/或通讯通路。
13、可选地,当所述杆径的数量为n+1时,所述下沉安装件还包括至少n个连接件,所述连接件用于将相邻的杆径进行可拆卸的连接。
14、可选地,所述雷达主体包括扫描探头和转动单元;
15、所述扫描探头安装在所述转动单元上,所述转动单元转动时带动所述扫描探头运动,以使所述扫描探头生成并发射所述具有至少一个预设角度的测量信号,并接收所述具有至少一个预设角度的测量信号经所述待测介质反射后对应形成的所述至少一个回波信号。
16、可选地,所述雷达主体还包括处理单元、电源单元和通讯单元;
17、所述处理单元,与所述安装角度测量模块和所述扫描探头连接,用于控制所述扫描探头生成并发射所述具有至少一个预设角度的测量信号,并根据所述扫描探头接收的所述至少一个所述回波信号获取至少一个所述测距信息;以及,接收所述安装角度测量模块传输的所述实际角度信息,并将所述测距信息和所述实际角度信息传输至所述通讯单元;
18、所述电源单元,与所述处理单元连接,用于通过线缆接入外部供电,并将所述外部供电转换为多级工作电压;
19、所述通讯单元,与所述处理单元连接,用于将所述预设角度、所述测距信息和所述实际角度信息传输至所述误差修正模块。
20、可选地,所述误差修正模块包括服务器、主机和人机交互模块;
21、所述人机交互模块,与所述主机连接,用于在用户输入所述雷达主体的预设安装信息后,将所述预设安装信息经所述主机传递至所述服务器;以及,显示所述待测介质的信息参数和所述待测介质的表面三维形态图;
22、所述服务器,与所述主机和/或所述通讯单元连接,用于接收所述预设安装信息、所述预设角度、所述测距信息和所述实际角度信息;通过所述预设安装信息、所述预设角度和所述实际角度信息对所述雷达主体的角度信息进行修正,确定所述雷达主体的实际测量信号发射角度;以及,利用所述实际测量信号发射角度、所述测距信息和所述预设安装信息获得所述待测介质的信息参数和所述待测介质的表面三维形态图,并将所述待测介质的信息参数和所述待测介质的表面三维形态图经所述主机传输至所述人机交互模块进行显示。
23、本实用新型实施例所提供的技术方案,通过连接在雷达主体和目标容器之间的下沉安装件将雷达主体安装在目标容器中,使得雷达主体能够下沉至目标容器的内部,有效缩短了雷达主体与待测介质的表面之间的距离,且可以有效避开目标容器顶部的干扰物,比如横梁等,有利于提高3d扫描雷达的测量精度。
24、另外,本实用新型实施例通过安装角度测量模块对雷达主体的实际角度信息进行检测,并将实际角度信息传输至雷达主体;雷达本体根据自身生成并发射的具有至少一个预设角度的测量信号,以及接收到的至少一个回波信号,获取至少一个测距信息,进而将预设角度、测距信息和实际角度信息传输至误差修正模块;误差修正模块在获取雷达主体的预设安装信息之后,基于预设安装信息、预设角度和实际角度信息,对雷达主体的角度信息进行修正,以确定雷达主体的实际测量信号发射角度;误差修正模块根据实际测量信号发射角度、测距信息和预设安装信息分析获得待测介质的表面三维点云坐标,并根据表面三维点云坐标计算得到待测介质的信息参数,绘制待测介质的表面三维形态图,最后对待测介质的信息参数和待测介质的表面三维形态图进行显示;在预设安装信息与实际安装角度信息之间的差别,和/或,预设角度与实际测量信号发射角度之间的差别满足预设报警条件时,报警模块发出报警信号。
25、由此可见,即使是在3d扫描雷达的安装姿态偏离,和/或3d扫描雷达的内部元件的安装姿态存在偏差,和/或3d扫描雷达的内部元件老化失准等异常工况之下,本技术依然能够对雷达主体的角度信息,也即雷达主体的安装角度信息和/或雷达主体内部构件组装后的角度信息进行修正,最终提高了三维点云坐标的精确度,从而改善了待测介质信息参数的准确度以及待测介质表面三维形态图绘制的真实度,克服了现有的3d扫描雷达易受实际安装环境、内部元件安装偏差及内部元件老化失准影响,而难以保证测量精度的问题,有效降低了3d扫描雷达的测量误差,有利于提升3d扫描雷达的测量精度。
26、可以理解的是,本技术通过设置报警模块能够根据雷达主体的实际测量信号发射角度和/或实际安装角度信息进行报警操作,及时提醒用户对3d扫描雷达进行检修或者调整3d扫描雷达的安装位置,有利于降低3d扫描雷达的测量误差,提升3d扫描雷达的测量精度。
- 还没有人留言评论。精彩留言会获得点赞!