无人机地震检波器安装装置的制作方法
本发明广泛地涉及地球物理学领域,更具体地,涉及一种无人机地震检波器安装装置和相关的地震检波器安装方法。
背景技术:
1、以下对背景技术的讨论仅仅是为了便于理解本发明。该讨论并不承认或认可在本技术的优先权日所提及的任何材料是或曾经是公知常识的一部分。
2、如本领域中已知的,地震检波器是声学检测器设备,该地震检波器将地面运动或振动转换成电信号,该电信号可以被分析以获得地震信息。
3、反射地震学常常使用地震检波器来记录地下地质反射的能量波。地震检波器通常是非常敏感的设备,其可以对远处的地面震动做出响应。这些小信号可能会被来自地震检波器本地信号源的较大信号淹没。由于这个原因,地震检波器通常被部署在地理区域内的阵列中,从而可以通过使来自若干地震检波器的信号相关来恢复小信号。
4、仅在阵列中的一个或一些地震检波器上记录的信号通常可归因于不需要的局部事件,因此这些信号被丢弃。然而,可以假设,在阵列中的所有地震检波器上一致记录的小信号可以归因于远处的重要事件。
5、申请人已经认识到在期望的地理区域上部署地震检波器(例如包括多个地震检波器的阵列)的技术的缺点,其是一项艰巨且耗时的任务,尤其是在地理区域不可到达、不适宜居住和/或难以导航的情况下。本发明是考虑到这一缺点而构思的。
技术实现思路
1、本领域技术人员应该理解的是,本文提到的“无人机”广泛地包括任何合适的无人驾驶交通工具(例如飞行器或陆地车辆),并且可以被远程引导和/或自主操作以到达具有预定负载或货物(通常具有至少一个地震检波器)的特定地理位置。
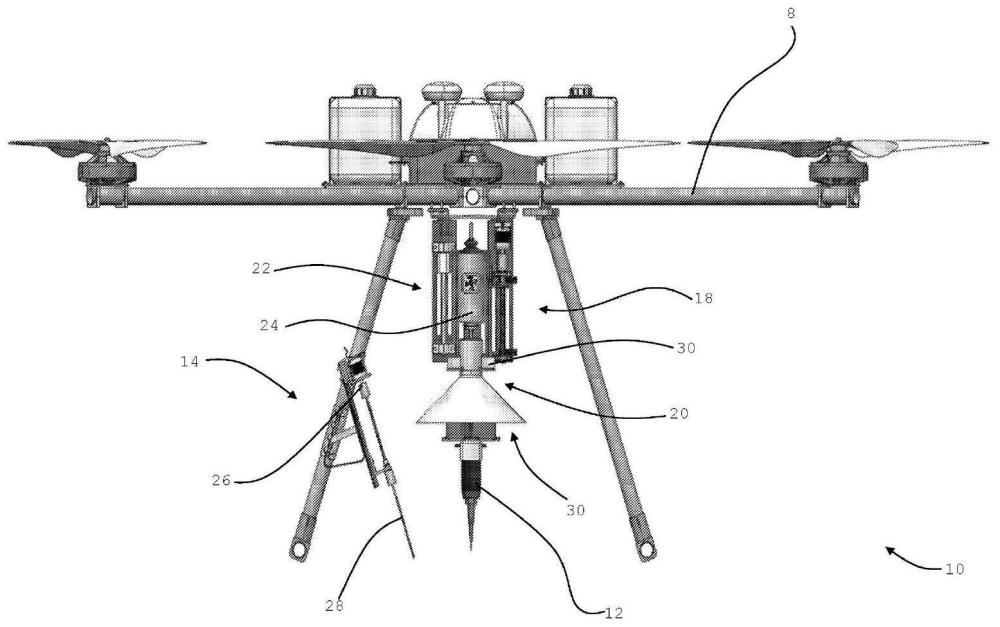
2、根据本发明的第一方面,提供了一种无人机地震检波器安装装置,包括:
3、无人机,所述无人机配置为运输地震检波器;
4、锚定装置,所述锚定装置配置为选择性地且可释放地将所述无人机锚定到表面;和
5、地震检波器植入组件,所述地震检波器植入组件配置成将所述地震检波器植入所述表面,所述植入组件包括:
6、i)地震检波器容器,所述地震检波器容器配置成可释放地接收所述地震检波器;
7、ii)平移托架,所述平移托架配置成将所述地震检波器容器推入所述表面;和
8、iii)脉动器,所述脉动器配置成向所述地震检波器容器施加至少一个植入脉冲,以便于在所述无人机被锚定到所述表面时将所述地震检波器植入所述表面,之后所述地震检波器从所述容器中释放并且所述无人机能够离开。
9、通常,所述安装装置包括控制器,所述控制器布置成与所述锚定装置和所述地震检波器植入组件进行信号通信,所述控制器配置成控制所述装置和组件的协同操作,以控制所述地震检波器植入所述表面。
10、通常,处理器包括配置为接收输入、对合适的指令集执行逻辑和算术运算并提供输出的任何合适的处理器或微控制器,以及包括暂时性和/或非暂时性电子存储器。
11、在一实施例中,无人机包括多轴飞行器,例如四轴飞行器。
12、在一实施例中,所述锚定装置包括可展开钻机,所述可展开钻机与所述无人机紧固在一起,并配置成将钻头展开并钻入所述表面,以便将所述无人机锚定至所述表面。
13、通常,所述钻机配置为相对于施加所述植入脉冲的方向以一角度将所述钻头钻入所述表面,以便于在地震检波器植入期间将所述无人机锚定到所述表面。
14、在一实施例中,所述植入脉冲基本垂直施加,并且钻孔角度与垂直方向成30°至60°。
15、在一实施例中,所述地震检波器容器包括地震检波器插座,所述地震检波器插座的形状被配置为接收所述地震检波器的一部分,所述插座包括锁,所述锁配置为可释放地将所述部分锁定在所述插座中。
16、在一实施例中,所述平移托架包括线性致动器,所述线性致动器悬挂在所述无人机下方,并具有通过限位开关和/或传感器确定的预定平移距离。
17、在一实施例中,所述平移托架配置成将所述地震检波器容器降低到所述表面上,直到出现预定量的平移阻力。
18、在一实施例中,所述脉动器配置成一旦出现所述预定量的平移阻力就激活所述脉动器。
19、在一实施例中,所述脉动器包括螺线管致动器,所述螺线管致动器配置成一旦被激活就施加所述至少一个植入脉冲。
20、在一实施例中,所述平移托架配置成将所述地震检波器容器降低到所述表面上,直到在每次激活所述脉动器之后出现所述预定量的平移阻力,直到达到最大平移距离。
21、通常,所述地震检波器容器配置成一旦达到所述最大平移距离就释放所述地震检波器。
22、通常,所述平移托架配置成在所述地震检波器从所述地震检波器容器释放后缩回至最小平移距离。
23、通常,所述锚定组件配置成在植入后并且所述地震检波器从所述地震检波器容器释放后从所述表面释放所述无人机。
24、根据本发明的第二方面,提供了一种地震检波器安装方法,包括以下步骤:
25、提供配置成运输地震检波器的无人机;
26、通过锚定装置选择性地且可释放地将所述无人机锚定到表面上;
27、通过平移托架将所述地震检波器推入所述表面,所述平移托架具有地震检波器容器,所述地震检波器接收在所述地震检波器容器中;
28、当所述地震检波器容器被推入所述表面并且所述无人机被锚定时,通过脉动器向所述地震检波器容器施加至少一个植入脉冲;和
29、一旦完成植入,就从所述地震检波器容器中释放所述地震检波器,以使所述无人机能够离开。
30、在一实施例中,所述无人机包括多轴飞行器,例如四轴飞行器。
31、在一实施例中,锚定所述无人机的步骤包括利用所述无人机快速展开钻机,并将钻头钻入所述表面,以便将所述无人机锚定至所述表面。
32、通常,相对于施加所述植入脉冲的方向成一角度执行钻孔步骤,以便于在地震检波器植入期间将所述无人机锚定到所述表面。
33、在一实施例中,所述植入脉冲基本垂直施加,钻孔角度与垂直方向成30°至60°。
34、在一实施例中,通过所述平移托架推动的步骤由线性致动器执行,所述线性致动器悬挂在所述无人机下方,并具有通过限位开关确定的预定平移距离。
35、在一实施例中,推动步骤是通过所述平移托架执行的,以将所述地震检波器容器下降到所述表面上直到出现预定量的平移阻力。
36、在一实施例中,施加至少一个植入脉冲的步骤是通过一旦发生所述预定量的平移阻力就激活所述脉动器来执行的。
37、在一实施例中,推动步骤是通过所述平移托架将所述地震检波器容器降低到所述表面上来执行的,直到在每次激活所述脉动器之后出现所述预定量的平移阻力,直到达到最大平移距离。
38、通常,从所述地震检波器容器释放所述地震检波器的步骤是一旦达到所述最大平移距离就通过所述地震检波器容器释放所述地震检波器来执行的,所述地震检波器容器包括地震检波器插座,所述地震检波器插座的形状被配置为接收所述地震检波器的一部分,并且包括锁,所述锁配置为可释放地将所述部分锁定在所述插座中。
39、通常,所述方法包括以下步骤:在所述地震检波器从所述地震检波器容器释放后,将所述平移托架缩回至最小平移距离。
40、通常,所述方法包括以下步骤:在所述地震检波器从所述地震检波器容器释放后,所述锚定组件从所述表面释放所述无人机。
41、在一实施例中,所述方法包括以下步骤:通过所述无人机返回植入的地震检波器所在位置并利用所述锚定装置锚定所述无人机,以收回所植入的地震检波器;将所述地震检波器接收到所述地震检波器容器中;将带有所述地震检波器的平移托架从所述最大平移距离平移到所述最小平移距离;以及从所述表面释放所述无人机,以使所述无人机能够与所述地震检波器一起离开。
42、根据本发明的第三方面,提供了一种安装地震检波器的方法,包括以下步骤:利用根据上述本发明第一方面的无人机地震检波器安装装置植入地震检波器。
43、根据本发明的另一方面,提供了一种大体上如本文描述和/或示出的无人机地震检波器安装装置和地震检波器安装方法。
- 还没有人留言评论。精彩留言会获得点赞!