1.本发明涉及测试模组技术领域,具体涉及一种测试模组重复定位精度系统及其方法。
背景技术:2.现在随着工业的发展,直线模组在各种自动化行业,有着不可替代的地位,在结构上,精度上,比传统的拼装机械传动更加有优势,其有以下几个特点,使轻负载的自动化更加灵活;可以简单的组合实现负载的直线曲线运动;定位更加精准,因此需要一套检测模组精度跑合的测试平台,可以检测模组的使用寿命的疲劳测试、定位精度、重复定位精度、运动过程中噪音大小、客户需求的单位ct(一个周期的循环时间)等等,但是现有的测试系统操作复杂,对熟练工人的依赖性较大,并且测试过程也十分的繁琐,大大降低了测试模组的工作效率,为此本发明提出了一种测试模组重复定位精度系统及其方法。
技术实现要素:3.本发明实施例提供了一种测试模组重复定位精度系统及其方法,解决了背景技术中提出的问题。
4.鉴于上述问题,本发明提出的技术方案是:
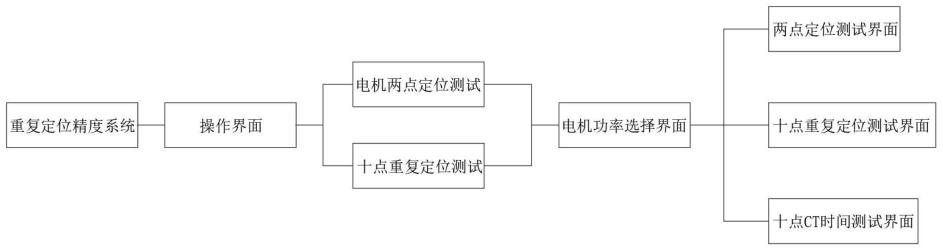
5.一种测试模组重复定位精度系统,应用于pc端的激光干涉仪上,所述pc端中安装有重复定位精度系统框架,所述重复定位精度系统框架包括操作界面、电机两点定位测试、十点重复定位测试、电机功率选择界面、两点定位测试界面、十点重复定位测试界面和十点ct时间测试界面,所述操作界面用于实现电机两点定位测试和十点重复定位测试的用户操作接口,所述电机功率选择界面用于实现对电机功率选择的设定,所述两点定位测试界面用于提供对电机两点定位测试,所述十点重复定位测试界面用于提供对电机十点重复定位测试,所述十点ct时间测试界面用于提供对电机十点ct时间测试。
6.作为本发明的一种优选技术方案,所述电机功率选择界面包括50w、100w、200w、400w、750w和1000w。
7.作为本发明的一种优选技术方案,所述两点定位测试界面包括伺服当前值、伺服目标a、伺服目标b、当前运行次数、当前运行时间、加减速时间、手动速度、自动速度:伺服自动运行的速度设置、启动运行、暂停运行、回零、急停、报警复位、正转和反转。
8.作为本发明的一种优选技术方案,所述伺服当前值用于提供伺服当前的位置坐标,所述伺服目标a和伺服目标b用于设置伺服的a点位置坐标和伺服的b点位置坐标,所述当前运行测试用于设置a-b两点的运行周期,所述当前运行时间用于设置伺服运行时间,所述加减速时间用于设置伺服加减速时间,所述手动速度用于实现正转或反转的一个点运动运行速度设置,所述自动速度用于实现伺服自动运行的速度设置,所述启动运行用于启动伺服运行,所述暂停运行用于提供伺服运行的暂停运动,所述回零用于实现伺服运行启动后自动寻找原点,所述急停用于提供紧急情况下伺服运动的紧急停止,所述报警复位用于
伺服运动中报警情况下的清除,所述正转用于实现伺服往正方向移动,所述反转用于实现伺服往负方向移动。
9.作为本发明的一种优选技术方案,所述十点重复定位测试界面包括接入坐标1-10、启动回退长度、结束回退长度、当前位置、加减速时间、点位数量、间隔时间、回退时间、手动速度、自动速度、设置周期、当前周期、周期清零、正转、反转、启动、暂停运行、回零、急停和报警复位。
10.作为本发明的一种优选技术方案,所述括接入坐标1-10用于输入当前第1-10个位置坐标,所述启动回退长度用于输入电机测试开始第一个点的正转反转的长度,所述结束回退长度用于输入电机测试结束的最后一个点的正转反转长度,所述当前位置用于提供伺服的当前位置坐标,所述加减速时间用于设置伺服加减速,所述时间点位数量用于设置需要跑的重复定位坐标点数1-10,所述间隔时间用于提供连续两个坐标点的运行间隔,所述时间回退时间用于提供开始的第一个坐标点和结束的最后一个点的正反转回退时间,所述手动速度用于设置正转或反转的一个点动运行速度,所述自动速度用于设置伺服自动运行的速度,所述设置周期用于设置伺服来回一次行程为1个周期,所述当前周期用于提供伺服来回运行的当前周期,所述周期清零用于清空当前的运行周期记录,所述正转用于实现伺服往正方向移动,所述反转用于伺服往负方向移动,所述启动用于设置好ab点位置坐标后,并启动伺服运行,所述暂停运行用于伺服运行过程中点击可以暂停运动,所述回零用于启动之后自动寻找原点,所述急停用于提供紧急停止伺服运动,所述报警复位用于伺服运行中有报警的情况下按下清除报警。
11.作为本发明的一种优选技术方案,所述十点ct时间测试界面包括坐标1-10#ct、当前位置、加减速时间、点位数量、手动速度、自动速度、设置周期、当前周期、周期清零、正转、反转、启动、暂停运行、回零、急停和报警复位。
12.作为本发明的一种优选技术方案,所述当前位置用于提供伺服的当前位置坐标,所述加减速时间用于设置伺服加减速时间,所述点位数量用于设置需要跑的重复定位坐标点数1-10,所述手动速度用于设置正转或反转的一个点动运行速度,所述自动速度用于设置伺服自动运行的速度,所述设置周期用于设置伺服来回一次行程为1个周期,所述当前周期用于显示伺服来回运行的当前周期,所述周期清零用于提供清空当前的运行周期记录,所述正转用于伺服往正方向移动,所述反转用于伺服往负方向移动,所述启动用于设置好ab点位置坐标之后,并启动伺服运行,所述暂停运行用于伺服运行过程中点击可以暂停运动,所述回零用于启动之后自动寻找原点,所述急停用于紧急情况按下紧急停止伺服运动,所述报警复位用于伺服运行中有报警的情况下按下清除报警。
13.另一方面,本发明提供一种测试模组重复定位精度系统的方法,包括以下步骤:
14.s1,操作选择:根据需要测试的需求通过操作界面选择电机两点定位测试或者十点重复定位测试,在选取好对应项之后,进入到电机功率选择界面,对电机功率进行选择,选择的范围包括50w、100w、200w、400w、750w和1000w,根据测试需要选择相应的功率;
15.s2,两点定位测试:当选择电机两点定位测试时,系统会进入到两点定位测试界面,两点定位测试界面包括伺服当前值、伺服目标a、伺服目标b、当前运行次数、当前运行时间、加减速时间、手动速度、自动速度:伺服自动运行的速度设置、启动运行、暂停运行、回零、急停、报警复位、正转和反转,其中,伺服当前值用于提供伺服当前的位置坐标,伺服目
标a和伺服目标b用于设置伺服的a点位置坐标和伺服的b点位置坐标,当前运行测试用于设置a-b两点的运行周期,当前运行时间用于设置伺服运行时间,加减速时间用于设置伺服加减速时间,手动速度用于实现正转或反转的一个点运动运行速度设置,自动速度用于实现伺服自动运行的速度设置,启动运行用于启动伺服运行,暂停运行用于提供伺服运行的暂停运动,回零用于实现伺服运行启动后自动寻找原点,急停用于提供紧急情况下伺服运动的紧急停止,报警复位用于伺服运动中报警情况下的清除,正转用于实现伺服往正方向移动,反转用于实现伺服往负方向移动;
16.s3,十点重复定位测试:当选择十点重复点位测试时,系统会进入到十点重复定位测试界面,十点重复定位测试界面包括接入坐标1-10、启动回退长度、结束回退长度、当前位置、加减速时间、点位数量、间隔时间、回退时间、手动速度、自动速度、设置周期、当前周期、周期清零、正转、反转、启动、暂停运行、回零、急停和报警复位,其中,接入坐标1-10用于输入当前第1-10个位置坐标,启动回退长度用于输入电机测试开始第一个点的正转反转的长度,结束回退长度用于输入电机测试结束的最后一个点的正转反转长度,当前位置用于提供伺服的当前位置坐标,加减速时间用于设置伺服加减速,时间点位数量用于设置需要跑的重复定位坐标点数1-10,间隔时间用于提供连续两个坐标点的运行间隔,时间回退时间用于提供开始的第一个坐标点和结束的最后一个点的正反转回退时间,手动速度用于设置正转或反转的一个点动运行速度,自动速度用于设置伺服自动运行的速度,设置周期用于设置伺服来回一次行程为1个周期,当前周期用于提供伺服来回运行的当前周期,周期清零用于清空当前的运行周期记录,正转用于实现伺服往正方向移动,反转用于伺服往负方向移动,启动用于设置好ab点位置坐标后,并启动伺服运行,暂停运行用于伺服运行过程中点击可以暂停运动,回零用于启动之后自动寻找原点,急停用于提供紧急停止伺服运动,报警复位用于伺服运行中有报警的情况下按下清除报警;
17.s4,十点ct时间测试:当选择十点ct时间测试时,系统会进入到十点ct时间测试界面,十点ct时间测试界面包括坐标1-10#ct、当前位置、加减速时间、点位数量、手动速度、自动速度、设置周期、当前周期、周期清零、正转、反转、启动、暂停运行、回零、急停和报警复位,其中,当前位置用于提供伺服的当前位置坐标,加减速时间用于设置伺服加减速时间,点位数量用于设置需要跑的重复定位坐标点数1-10,手动速度用于设置正转或反转的一个点动运行速度,自动速度用于设置伺服自动运行的速度,设置周期用于设置伺服来回一次行程为1个周期,当前周期用于显示伺服来回运行的当前周期,周期清零用于提供清空当前的运行周期记录,正转用于伺服往正方向移动,反转用于伺服往负方向移动,启动用于设置好ab点位置坐标之后,并启动伺服运行,暂停运行用于伺服运行过程中点击可以暂停运动,回零用于启动之后自动寻找原点,急停用于紧急情况按下紧急停止伺服运动,报警复位用于伺服运行中有报警的情况下按下清除报警;
18.s5,数据整合,配合激光干涉仪可得出精度测试数据,并且生成测试报告提供给使用者。
19.相对于现有技术而言,本发明的有益效果是:通过设置操作界面,方便使用者可以选择电机两点定位测试以及十点重复定位测试,并且通过设置电机功率选择界面,可以对电机的功率进行选择,可对不同功率电机的运行情况进行检测,在两点定位测试界面中,伺服当前值用于提供伺服当前的位置坐标,伺服目标a和伺服目标b用于设置伺服的a点位置
坐标和伺服的b点位置坐标,当前运行测试用于设置a-b两点的运行周期,当前运行时间用于设置伺服运行时间,加减速时间用于设置伺服加减速时间,手动速度用于实现正转或反转的一个点运动运行速度设置,自动速度用于实现伺服自动运行的速度设置,在十点重复定位测试界面中,接入坐标1-10用于输入当前第1-10个位置坐标,启动回退长度用于输入电机测试开始第一个点的正转反转的长度,结束回退长度用于输入电机测试结束的最后一个点的正转反转长度,当前位置用于提供伺服的当前位置坐标,加减速时间用于设置伺服加减速,时间点位数量用于设置需要跑的重复定位坐标点数1-10,在十点ct时间测试界面中,当前位置用于提供伺服的当前位置坐标,加减速时间用于设置伺服加减速时间,点位数量用于设置需要跑的重复定位坐标点数1-10,手动速度用于设置正转或反转的一个点动运行速度,自动速度用于设置伺服自动运行的速度,通过设置重复定位精度系统,优化电机测试的步骤,方便使用者进行操作,降低了对熟练工人的依赖,并提高了测试效率和测试精度。
20.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
附图说明
21.图1为本发明实施例公开的一种测试模组重复定位精度系统的框图;
22.图2为本发明实施例公开的一种测试模组重复定位精度系统的电机功率选择界面框图;
23.图3为本发明实施例公开的一种测试模组重复定位精度系统的两点定位测试界面框图;
24.图4为本发明实施例公开的一种测试模组重复定位精度系统的十点重复定位测试界面框图;
25.图5为本发明实施例公开的一种测试模组重复定位精度系统的十点ct时间测试界面框图;
26.图6为本发明实施例公开的一种测试模组重复定位精度系统的方法框图。
具体实施例
27.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
28.实施例一
29.参照附图1-5所示,一种测试模组重复定位精度系统,应用于pc端的激光干涉仪上,所述pc端中安装有重复定位精度系统框架,所述重复定位精度系统框架包括操作界面、电机两点定位测试、十点重复定位测试、电机功率选择界面、两点定位测试界面、十点重复定位测试界面和十点ct时间测试界面,所述操作界面用于实现电机两点定位测试和十点重复定位测试的用户操作接口,所述电机功率选择界面用于实现对电机功率选择的设定,所述两点定位测试界面用于提供对电机两点定位测试,所述十点重复定位测试界面用于提供对电机十点重复定位测试,所述十点ct时间测试界面用于提供对电机十点ct时间测试。
30.作用本发明的一种实施例,进一步的,电机功率选择界面包括50w、100w、200w、400w、750w和1000w。
31.作用本发明的一种实施例,进一步的,两点定位测试界面包括伺服当前值、伺服目标a、伺服目标b、当前运行次数、当前运行时间、加减速时间、手动速度、自动速度:伺服自动运行的速度设置、启动运行、暂停运行、回零、急停、报警复位、正转和反转。
32.作用本发明的一种实施例,进一步的,伺服当前值用于提供伺服当前的位置坐标,所述伺服目标a和伺服目标b用于设置伺服的a点位置坐标和伺服的b点位置坐标,所述当前运行测试用于设置a-b两点的运行周期,所述当前运行时间用于设置伺服运行时间,所述加减速时间用于设置伺服加减速时间,所述手动速度用于实现正转或反转的一个点运动运行速度设置,所述自动速度用于实现伺服自动运行的速度设置,所述启动运行用于启动伺服运行,所述暂停运行用于提供伺服运行的暂停运动,所述回零用于实现伺服运行启动后自动寻找原点,所述急停用于提供紧急情况下伺服运动的紧急停止,所述报警复位用于伺服运动中报警情况下的清除,所述正转用于实现伺服往正方向移动,所述反转用于实现伺服往负方向移动。
33.作用本发明的一种实施例,进一步的,十点重复定位测试界面包括接入坐标1-10、启动回退长度、结束回退长度、当前位置、加减速时间、点位数量、间隔时间、回退时间、手动速度、自动速度、设置周期、当前周期、周期清零、正转、反转、启动、暂停运行、回零、急停和报警复位。
34.作用本发明的一种实施例,进一步的,括接入坐标1-10用于输入当前第1-10个位置坐标,所述启动回退长度用于输入电机测试开始第一个点的正转反转的长度,所述结束回退长度用于输入电机测试结束的最后一个点的正转反转长度,所述当前位置用于提供伺服的当前位置坐标,所述加减速时间用于设置伺服加减速,所述时间点位数量用于设置需要跑的重复定位坐标点数1-10,所述间隔时间用于提供连续两个坐标点的运行间隔,所述时间回退时间用于提供开始的第一个坐标点和结束的最后一个点的正反转回退时间,所述手动速度用于设置正转或反转的一个点动运行速度,所述自动速度用于设置伺服自动运行的速度,所述设置周期用于设置伺服来回一次行程为1个周期,所述当前周期用于提供伺服来回运行的当前周期,所述周期清零用于清空当前的运行周期记录,所述正转用于实现伺服往正方向移动,所述反转用于伺服往负方向移动,所述启动用于设置好ab点位置坐标后,并启动伺服运行,所述暂停运行用于伺服运行过程中点击可以暂停运动,所述回零用于启动之后自动寻找原点,所述急停用于提供紧急停止伺服运动,所述报警复位用于伺服运行中有报警的情况下按下清除报警。
35.作用本发明的一种实施例,进一步的,十点ct时间测试界面包括坐标1-10#ct、当前位置、加减速时间、点位数量、手动速度、自动速度、设置周期、当前周期、周期清零、正转、反转、启动、暂停运行、回零、急停和报警复位。
36.作用本发明的一种实施例,进一步的,当前位置用于提供伺服的当前位置坐标,所述加减速时间用于设置伺服加减速时间,所述点位数量用于设置需要跑的重复定位坐标点数1-10,所述手动速度用于设置正转或反转的一个点动运行速度,所述自动速度用于设置伺服自动运行的速度,所述设置周期用于设置伺服来回一次行程为1个周期,所述当前周期用于显示伺服来回运行的当前周期,所述周期清零用于提供清空当前的运行周期记录,所
述正转用于伺服往正方向移动,所述反转用于伺服往负方向移动,所述启动用于设置好ab点位置坐标之后,并启动伺服运行,所述暂停运行用于伺服运行过程中点击可以暂停运动,所述回零用于启动之后自动寻找原点,所述急停用于紧急情况按下紧急停止伺服运动,所述报警复位用于伺服运行中有报警的情况下按下清除报警。
37.实施例二
38.参照附图6所示,本发明实施例另提供的一种测试模组重复定位精度系统的方法,包括以下步骤:
39.s1,操作选择:根据需要测试的需求通过操作界面选择电机两点定位测试或者十点重复定位测试,在选取好对应项之后,进入到电机功率选择界面,对电机功率进行选择,选择的范围包括50w、100w、200w、400w、750w和1000w,根据测试需要选择相应的功率;
40.s2,两点定位测试:当选择电机两点定位测试时,系统会进入到两点定位测试界面,两点定位测试界面包括伺服当前值、伺服目标a、伺服目标b、当前运行次数、当前运行时间、加减速时间、手动速度、自动速度:伺服自动运行的速度设置、启动运行、暂停运行、回零、急停、报警复位、正转和反转,其中,伺服当前值用于提供伺服当前的位置坐标,伺服目标a和伺服目标b用于设置伺服的a点位置坐标和伺服的b点位置坐标,当前运行测试用于设置a-b两点的运行周期,当前运行时间用于设置伺服运行时间,加减速时间用于设置伺服加减速时间,手动速度用于实现正转或反转的一个点运动运行速度设置,自动速度用于实现伺服自动运行的速度设置,启动运行用于启动伺服运行,暂停运行用于提供伺服运行的暂停运动,回零用于实现伺服运行启动后自动寻找原点,急停用于提供紧急情况下伺服运动的紧急停止,报警复位用于伺服运动中报警情况下的清除,正转用于实现伺服往正方向移动,反转用于实现伺服往负方向移动;
41.s3,十点重复定位测试:当选择十点重复点位测试时,系统会进入到十点重复定位测试界面,十点重复定位测试界面包括接入坐标1-10、启动回退长度、结束回退长度、当前位置、加减速时间、点位数量、间隔时间、回退时间、手动速度、自动速度、设置周期、当前周期、周期清零、正转、反转、启动、暂停运行、回零、急停和报警复位,其中,接入坐标1-10用于输入当前第1-10个位置坐标,启动回退长度用于输入电机测试开始第一个点的正转反转的长度,结束回退长度用于输入电机测试结束的最后一个点的正转反转长度,当前位置用于提供伺服的当前位置坐标,加减速时间用于设置伺服加减速,时间点位数量用于设置需要跑的重复定位坐标点数1-10,间隔时间用于提供连续两个坐标点的运行间隔,时间回退时间用于提供开始的第一个坐标点和结束的最后一个点的正反转回退时间,手动速度用于设置正转或反转的一个点动运行速度,自动速度用于设置伺服自动运行的速度,设置周期用于设置伺服来回一次行程为1个周期,当前周期用于提供伺服来回运行的当前周期,周期清零用于清空当前的运行周期记录,正转用于实现伺服往正方向移动,反转用于伺服往负方向移动,启动用于设置好ab点位置坐标后,并启动伺服运行,暂停运行用于伺服运行过程中点击可以暂停运动,回零用于启动之后自动寻找原点,急停用于提供紧急停止伺服运动,报警复位用于伺服运行中有报警的情况下按下清除报警;
42.s4,十点ct时间测试:当选择十点ct时间测试时,系统会进入到十点ct时间测试界面,十点ct时间测试界面包括坐标1-10#ct、当前位置、加减速时间、点位数量、手动速度、自动速度、设置周期、当前周期、周期清零、正转、反转、启动、暂停运行、回零、急停和报警复
位,其中,当前位置用于提供伺服的当前位置坐标,加减速时间用于设置伺服加减速时间,点位数量用于设置需要跑的重复定位坐标点数1-10,手动速度用于设置正转或反转的一个点动运行速度,自动速度用于设置伺服自动运行的速度,设置周期用于设置伺服来回一次行程为1个周期,当前周期用于显示伺服来回运行的当前周期,周期清零用于提供清空当前的运行周期记录,正转用于伺服往正方向移动,反转用于伺服往负方向移动,启动用于设置好ab点位置坐标之后,并启动伺服运行,暂停运行用于伺服运行过程中点击可以暂停运动,回零用于启动之后自动寻找原点,急停用于紧急情况按下紧急停止伺服运动,报警复位用于伺服运行中有报警的情况下按下清除报警;
43.s5,数据整合,配合激光干涉仪可得出精度测试数据,并且生成测试报告提供给使用者。
44.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。