应用于动作捕捉系统的位置姿态捕捉方法及装置
本技术涉及动作捕捉,尤其涉及一种应用于动作捕捉系统的位置姿态捕捉方法及系统。
背景技术:
1、动作捕捉(motion capture,mocap)技术被广泛应用于远程医疗、虚拟现实和体育训练等方面。具体的,动作捕捉技术是一种利用相机(例如rgb、红外或光学相机)、机械装置和惯性传感器来获取整个人体或人体某个部分的位置和方向的技术。在具体应用中,惯性动作捕捉(i-mocap)技术,是一种新型的动作捕捉技术。它利用无线动作姿态传感器先采集身体部位的姿态方位,再利用人体运动学原理恢复人体运动模型,同时采用无线传输的方式将数据呈现在电脑软件里。惯性动作捕捉技术以其便携、成本低、对环境光条件不敏感等优点得到了广泛的应用。
2、惯性动作捕捉技术中,为了提高运动捕捉精度,需对运动捕捉进行运动学参数标定。传统的标定方法,如工业臂中广泛使用的最小二乘法来标定参数。
3、在实现现有技术中,发明人发现:
4、在数据采集过程中,由于陀螺漂移等因素会产生随机有色噪声。传统的标定方法无法有效降低陀螺漂移等随机有色噪声带来的影响。因此,采集的数据为有偏估计,导致运动捕捉精度低。
5、因此,需要提供一种应用于动作捕捉系统的位置姿态捕捉方法及系统,用以解决动作捕捉精度低的技术问题。
技术实现思路
1、本技术实施例需要提供一种应用于动作捕捉系统的位置姿态捕捉方法及系统,用以解决动作捕捉精度低的技术问题。
2、具体的,一种应用于动作捕捉系统的位置姿态捕捉方法,包括:
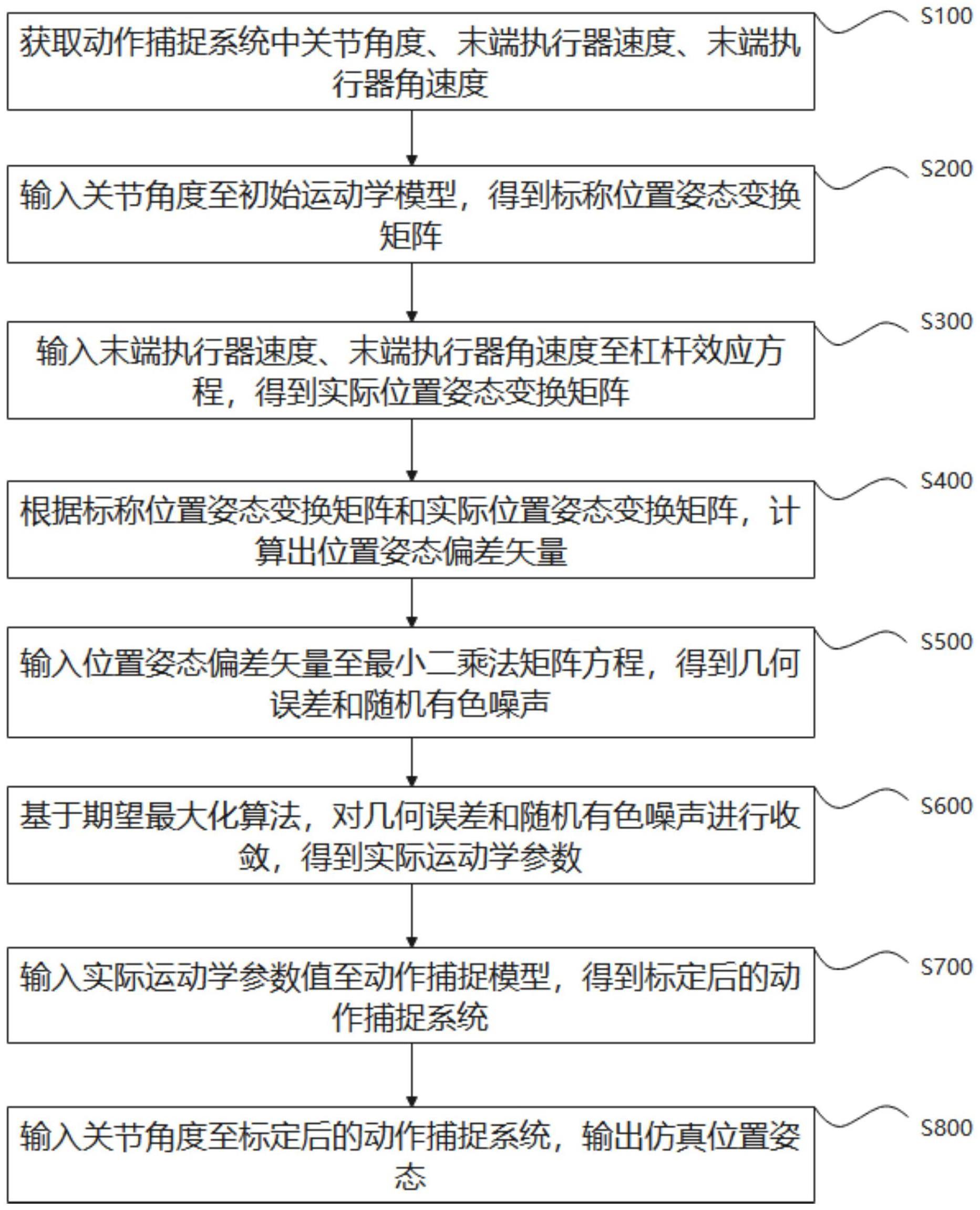
3、获取动作捕捉系统中关节角度、末端执行器速度、末端执行器角速度;
4、输入关节角度至初始运动学模型,得到标称位置姿态变换矩阵;
5、输入末端执行器速度、末端执行器角速度至杠杆效应方程,得到实际位置姿态变换矩阵;
6、根据标称位置姿态变换矩阵和实际位置姿态变换矩阵,计算出位置姿态偏差矢量;
7、输入位置姿态偏差矢量至最小二乘法矩阵方程,得到几何误差和随机有色噪声;
8、基于期望最大化算法,对几何误差和随机有色噪声进行收敛,得到实际运动学参数;
9、输入实际运动学参数值至动作捕捉系统,得到标定后的动作捕捉系统;
10、输入关节角度至动作捕捉系统,输出仿真位置姿态。
11、进一步的,所述输入关节角度至初始运动学模型,得到标称位置姿态变换矩阵,包括:
12、建立三维坐标系、位于三维坐标系的初始运动学模型;所述初始运动学模型至少具有始端关节、末端关节;
13、根据初始运动学模型,生成末端关节相对于始端关节的齐次变换矩阵,作为初始运动学参数方程;
14、输入关节角度至初始运动学模型,建立动作捕捉系统与初始运动学模型的映射关系;
15、根据关节角度,更新初始运动学参数方程,生成标称位置姿态变换矩阵。
16、进一步的,所述输入末端执行器速度、末端执行器角速度至杠杆效应方程,得到实际位置姿态变换矩阵,包括:
17、根据叉积运算,输入末端执行器速度、末端执行器角速度至杠杆效应方程,得到末端执行器位置;
18、通过动作捕捉系统中陀螺仪和加速度计,得到末端执行器方向;
19、根据末端执行器位置、末端执行器方向,得出实际位置姿态变换矩阵。
20、进一步的,根据标称位置姿态变换矩阵和实际位置姿态变换矩阵,计算出位置姿态偏差矢量,包括:
21、根据标称位置姿态变换矩阵和实际位置姿态变换矩阵,得到末端关节相对于始端关节的齐次变换矩阵;
22、根据齐次变换矩阵,确定包含位置偏差矢量、姿态偏差矢量、位置姿态偏差矢量的方程表达式;
23、对齐次变换矩阵一阶微分,得到位置偏差矢量、姿态偏差矢量;
24、将位置偏差矢量、姿态偏差矢量带入方程表达式,计算出位置姿态偏差矢量。
25、进一步的,所述输入位置姿态偏差矢量至最小二乘法矩阵方程,得到几何误差和随机有色噪声,包括:
26、基于最小二乘法,生成包含位置姿态偏差矢量、几何误差、随机有色噪声的最小二乘法矩阵方程;
27、输入位置姿态偏差矢量至最小二乘法矩阵方程,得到几何误差和随机有色噪声。
28、本技术实施例还提供一种动作捕捉系统中运动学参数的标定装置,包括:
29、获取模块,用于获取动作捕捉系统中关节角度、末端执行器速度、末端执行器角速度;
30、计算模块,用于输入关节角度至初始运动学模型,得到标称位置姿态变换矩阵;还用于输入末端执行器速度、末端执行器角速度至杠杆效应方程,得到实际位置姿态变换矩阵;还用于根据标称位置姿态变换矩阵和实际位置姿态变换矩阵,计算出位置姿态偏差矢量;
31、标定模块,用于输入位置姿态偏差矢量至最小二乘法矩阵方程,得到几何误差和随机有色噪声;还用于基于期望最大化算法,对几何误差和随机有色噪声进行收敛,得到实际运动学参数;
32、仿真模块,用于输入实际运动学参数值至动作捕捉系统,得到标定后的动作捕捉系统;还用于输入关节角度至动作捕捉系统,输出仿真位置姿态。
33、进一步的,所述计算模块,用于输入关节角度至初始运动学模型,得到标称位置姿态变换矩阵,具体用于:
34、建立三维坐标系、位于三维坐标系的初始运动学模型;所述初始运动学模型至少具有始端关节、末端关节;
35、根据初始运动学模型,生成末端关节相对于始端关节的齐次变换矩阵,作为初始运动学参数方程;
36、输入关节角度至初始运动学模型,建立动作捕捉系统与初始运动学模型的映射关系;
37、根据关节角度,更新初始运动学参数方程,生成标称位置姿态变换矩阵。
38、进一步的,所述计算模块,还用于输入末端执行器速度、末端执行器角速度至杠杆效应方程,得到实际位置姿态变换矩阵,具体用于:
39、根据叉积运算,输入末端执行器速度、末端执行器角速度至杠杆效应方程,得到末端执行器位置;
40、通过动作捕捉系统中陀螺仪和加速度计,得到末端执行器方向;
41、根据末端执行器位置、末端执行器方向,得出实际位置姿态变换矩阵。
42、进一步的,还用于根据标称位置姿态变换矩阵和实际位置姿态变换矩阵,计算出位置姿态偏差矢量,包括:
43、根据标称位置姿态变换矩阵和实际位置姿态变换矩阵,得到末端关节相对于始端关节的齐次变换矩阵;
44、根据齐次变换矩阵,确定包含位置偏差矢量、姿态偏差矢量、位置姿态偏差矢量的方程表达式;
45、对齐次变换矩阵一阶微分,得到位置偏差矢量、姿态偏差矢量;
46、将位置偏差矢量、姿态偏差矢量带入方程表达式,计算出位置姿态偏差矢量。
47、进一步的,所述标定模块,用于输入位置姿态偏差矢量至最小二乘法矩阵方程,得到几何误差和随机有色噪声,具体用于:
48、基于最小二乘法,生成包含位置姿态偏差矢量、几何误差、随机有色噪声的最小二乘法矩阵方程;
49、输入位置姿态偏差矢量至最小二乘法矩阵方程,得到几何误差和随机有色噪声。
50、本技术实施例提供的技术方案,至少具有如下有益效果:
51、通过使用最小二乘法标定几何参数,减少了期望最大化框架下的迭代次数,提高了该方法在嵌入式系统上的工作效率。在数据采集过程中,基于期望最大化算法,对几何误差和随机有色噪声进行收敛,得到实际运动学参数有效降低陀螺漂移等随机有色噪声带来的影响,提高了运动捕捉精度低。
- 还没有人留言评论。精彩留言会获得点赞!