一种无人车的融合导航方法和装置
本发明涉及无人车导航,具体涉及一种无人车的融合导航方法和装置。
背景技术:
1、目前,对于无人车的导航,主要包括卫星导航、激光导航、惯性导航等手段。对于激光导航方式,其成本较高,且对场地要求也比较高。对于惯性导航方式,在长时间使用后,会有严重的累积误差,如果不及时修正,将导致无人车无法按照正常路径进行形式。对于卫星导航方式,其在室内仓库、地下场所等信号遮蔽场景中,将无法实现有效定位,也影响了导航定位效果。
2、在采用多种导航方式的无人车上,目前在实际导航过程中,同一时刻只使用一种导航方式,未对导航信息进行有效融合。在环境单一的场景下,单一导航可获得较高的导航精度。但在环境差异大的场景,如行程环境同时涉及室内和室外时,单一导航方式存在导航精度低、适用性差的问题,尤其是在干扰严重的场景中,甚至会导致单一导航方式失效,无法对无人车进行有效导航。
技术实现思路
1、为解决现有的无人车导航方法在同一时刻只使用一种导航方式,在环境差异大、干扰严重的场景中,存在无人车导航精度低的问题,本发明实施例第一方面公开了一种无人车的融合导航方法,包括:
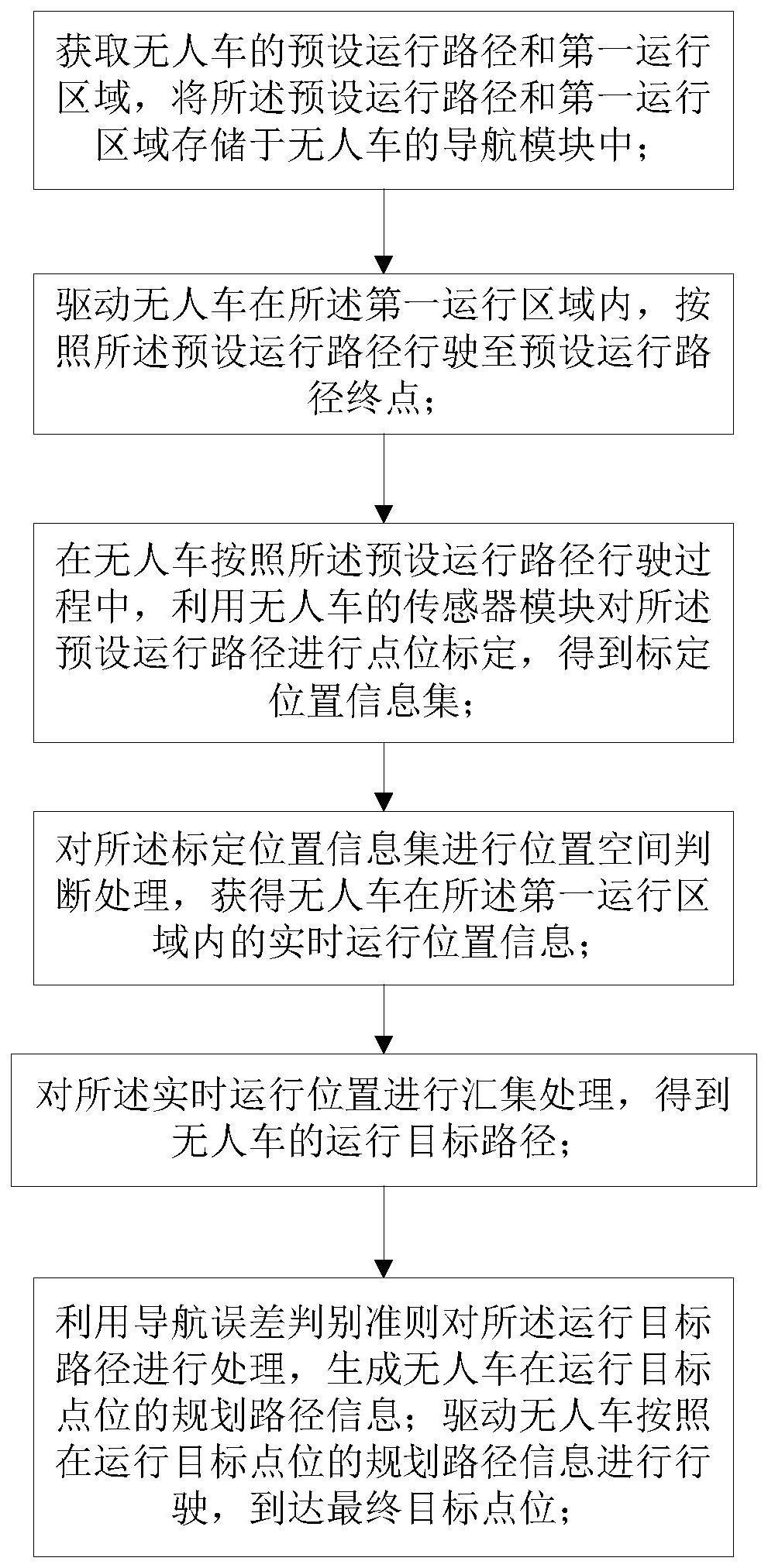
2、s1,获取无人车的预设运行路径和第一运行区域,将所述预设运行路径和第一运行区域存储于无人车的导航模块中;
3、s2,驱动无人车在所述第一运行区域内,按照所述预设运行路径行驶至预设运行路径终点;
4、s3,在无人车按照所述预设运行路径行驶过程中,利用无人车的传感器模块对所述预设运行路径进行点位标定,得到标定位置信息集;所述标定位置信息集,包括所述传感器模块所采集的若干个点位的位置参数信息和点位到达时间信息;所述无人车的传感器模块,包括卫星定位导航传感器、激光传感器和惯性导航传感器;
5、s4,对所述标定位置信息集进行位置空间判断处理,获得无人车在所述第一运行区域内的实时运行位置信息;
6、s5,对所述实时运行位置进行汇集处理,得到无人车的运行目标路径;所述运行目标路径,包括若干个运行目标点位信息;
7、s6,利用导航误差判别模型对所述运行目标路径进行处理,生成无人车在运行目标点位的规划路径信息;驱动无人车按照在运行目标点位的规划路径信息进行行驶,到达最终目标点位;所述导航误差判别模型包括卫星导航误差判别模型和激光导航误差判别模型。
8、作为一种可选的实施方式,在本发明实施例第一方面中,所述在无人车按照所述预设运行路径行驶过程中,利用无人车的传感器模块对预设运行路径进行点位标定,得到标定位置信息集,包括:
9、s31,在无人车按照所述预设运行路径行驶过程中,按照预设时间间隔,分别利用所述卫星定位导航传感器、激光传感器和惯性导航传感器,对无人车所处点位位置信息进行数据采集,得到所处点位的位置参数信息和点位到达时间信息;所述所处点位的位置参数信息,包括卫星定位参数、激光传感器参数和惯性导航参数;
10、s32,对所处点位的位置参数信息和点位到达时间信息进行融合处理,得到标定位置信息集。
11、作为一种可选的实施方式,在本发明实施例第一方面中,所述对所述标定位置信息集进行位置空间判断处理,获得无人车在所述第一运行区域内的实时运行位置信息,包括:
12、s41,对所述标定位置信息集中的所处点位的位置参数信息进行判断,当所述位置参数信息位于所述第一运行区域内时,将所述位置参数信息列为有效传感器位置参数信息,当所述位置参数信息位于所述第一运行区域外时,将所述位置参数信息列为无效传感器位置参数信息;
13、s42,对所述有效传感器位置参数信息,利用传感器置信度进行加权处理,得到点位实时位置信息;所述传感器置信度,根据所述无效传感器位置参数信息的累积出现次数或所述位置参数信息的方差来确定;
14、s43,利用所述点位实时位置信息和点位到达时间信息,构建得到无人车的实时运行位置信息。
15、作为一种可选的实施方式,在本发明实施例第一方面中,所述对所述实时运行位置进行汇集处理,得到无人车的运行目标路径,包括:
16、s51,按照所述点位到达时间信息的先后顺序,对所述点位实时位置信息进行排序处理,得到无人车点位列表信息;
17、s52,利用所述无人车点位列表信息,对所述无人车点位列表中的无人车点位进行路径规划,得到无人车的运行目标路径。
18、作为一种可选的实施方式,在本发明实施例第一方面中,所述利用导航误差判别模型对所述运行目标路径进行处理,生成无人车在运行目标点位的规划路径信息;驱动无人车按照在运行目标点位的规划路径信息进行行驶,到达最终目标点位,包括:
19、s61,利用所述运行目标路径,驱动无人车行驶至所述运行目标点位;
20、s62,利用无人车的当前位置信息和所述运行目标路径,生成无人车的目标点位行驶信息集;
21、s63,利用导航误差判别模型,对所述目标点位行驶信息集进行处理,得到无人车在所述运行目标点位的规划路径信息;
22、s64,驱动无人车,按照所述运行目标点位的规划路径信息行驶,到达下一个运行目标点位;
23、s65,对所述到达的运行目标点位进行判断,当所述运行目标点位为最终目标点位时,完成无人车融合导航过程;当所述运行目标点位不是最终目标点位时,执行步骤s62。
24、作为一种可选的实施方式,在本发明实施例第一方面中,所述利用无人车的当前位置信息和所述运行目标路径,生成无人车的目标点位行驶信息集,包括:
25、s621,利用所述传感器模块,采集得到无人车的当前位置信息;
26、s622,以所述无人车的中心为原点,以无人车车头方向为x轴,以垂直车头方向为y轴,建立二维行驶坐标系;所述无人车车头在所述二维行驶坐标系下的坐标为(x0,y0);
27、s623,根据所述无人车的当前位置信息和所述运行目标路径,确定无人车的下一个运行目标点位在二维行驶坐标系下的坐标为(x1,y1);
28、s624,利用所述卫星定位导航传感器,对所述无人车车头坐标(x0,y0)和所述运行目标点位坐标(x1,y1)进行处理,生成第一行驶向量坐标(x2,y2);
29、s625,利用所述激光传感器,对所述无人车车头坐标(x0,y0)和所述运行目标点位坐标(x1,y1)进行处理,生成第二行驶向量坐标(x3,y3);
30、s626,利用所述惯性导航传感器,对所述无人车车头坐标(x0,y0)和所述运行目标点位坐标(x1,y1)进行处理,生成第三行驶向量坐标(x4,y4);
31、s627,利用所述第一行驶向量、第二行驶向量和第三行驶向量,构建无人车的目标点位行驶信息集。
32、作为一种可选的实施方式,在本发明实施例第一方面中,所述导航误差判别模型包括卫星导航误差判别模型和激光导航误差判别模型,包括:
33、所述卫星导航误差判别模型,其表达式为:
34、∣x4-x2∣≤a,
35、∣y4-y2∣≤a,
36、∣(x2-x1)(y2-y1)∣≤a2,
37、其中,惯性导航误差阈值为a,卫星导航误差面积约束阈值为a2;
38、所述激光导航误差判别模型,其表达式为:
39、∣x4-x3∣≤a,
40、∣y4-y3∣≤a,
41、∣(x3-x1)(y3-y1)∣≤a4,
42、其中,激光导航误差面积约束阈值为a4。
43、作为一种可选的实施方式,在本发明实施例第一方面中,利用导航误差判别模型,对所述目标点位行驶信息集进行处理,得到无人车在所述运行目标点位的规划路径信息,包括:
44、s631,利用导航误差判别模型,对所述目标点位行驶信息集进行判别;若所述目标点位行驶信息集满足卫星导航误差判别模型,判定所述第一行驶向量有效,若不满足所述卫星导航误差判别模型,判定所述第一行驶向量无效;若所述目标点位行驶信息集满足激光导航误差判别模型,判定所述第二行驶向量有效,若不满足所述激光导航误差判别模型,判定所述第二行驶向量无效;
45、s632,当只有所述第三行驶向量有效时,将所述第三行驶向量作为无人车在所述运行目标点位的规划路径信息;当只有所述第一行驶向量和第三行驶向量有效时,将所述第一行驶向量作为无人车在所述运行目标点位的规划路径信息;当只有所述第二行驶向量和第三行驶向量有效时,将所述第二行驶向量作为无人车在所述运行目标点位的规划路径信息;当所述第一行驶向量、第二行驶向量和第三行驶向量同时有效时,利用加权准则对所述三个行驶向量进行处理,得到无人车在所述运行目标点位的规划路径信息。
46、本发明实施例第二方面公开了一种无人车的融合导航装置,所述装置包括:
47、存储有可执行程序代码的存储器;
48、与所述存储器耦合的处理器;
49、所述处理器调用所述存储器中存储的所述可执行程序代码,执行本发明实施例第一方面所述的无人车融合导航方法。
50、本发明实施例第三方面公开了一种计算机存储介质存储,所述计算机存储介质存储有计算机指令,所述计算机指令被调用时,用于执行本发明实施例第一方面所述的无人车融合导航方法。
51、有益效果
52、1、本发明提供一种无人车融合导航方法,在导航过程中同时使用三类传感器,能够使得用于物流搬运的无人车在运行过程中获得精准的驱动逻辑,其具有可受干扰因素少,逻辑简单,运算快捷的特点,适用性较佳。
53、2、本发明中方法在其步骤执行的过程中,对于无人车的运行路径通过标定点位的选择来完成,并且在选择标定点位的过程中,还能够将其他无人车作为标定点位所使用,进而借此,使得无人车在运行的过程中,可完成无人叉搬运货物交接或单次任务多目的地的货物搬运工作,使得无人车的货物搬运功能更加智能。
- 还没有人留言评论。精彩留言会获得点赞!