一种低成本的室内移动机器人激光靶标定位方法、系统、存储介质及终端与流程
本发明涉及室内机器人定位,尤其涉及一种低成本的室内移动机器人激光靶标定位方法、系统、存储介质及终端。
背景技术:
1、随着智能工业和智能物流的发展,仓库等室内场景的管理越来越趋向于无人化,智能移动机器人、无人叉车等使用也越来越多,其中定位算法在智能移动机器人系统中占据了重要地位。为了在室内自动化生产和仓储管理等中应用移动机器人,要求室内移动机器人必须精确识别当前位置即定位,只有精确识别当前位置,才能精确传输和搬运产品。
2、现有的室内定位方法中,基于参考物的室内定位多采用反光板的形式,激光导航的反光板可能会被遮挡,且在实际应用环境中,反光板的信号强度与真实环境的信号强度有时并没有有效的区分,目前的机器人室内定位方法识别准确率和效率不高,造成定位系统无法使用。
技术实现思路
1、本发明的目的在于克服现有技术中室内机器人定位的不足,提供了一种低成本的室内移动机器人激光靶标定位方法、系统、存储介质及终端。
2、本发明的目的是通过以下技术方案来实现的:
3、在第一方面,提供一种低成本的室内移动机器人激光靶标定位方法,所述方法包括以下步骤:
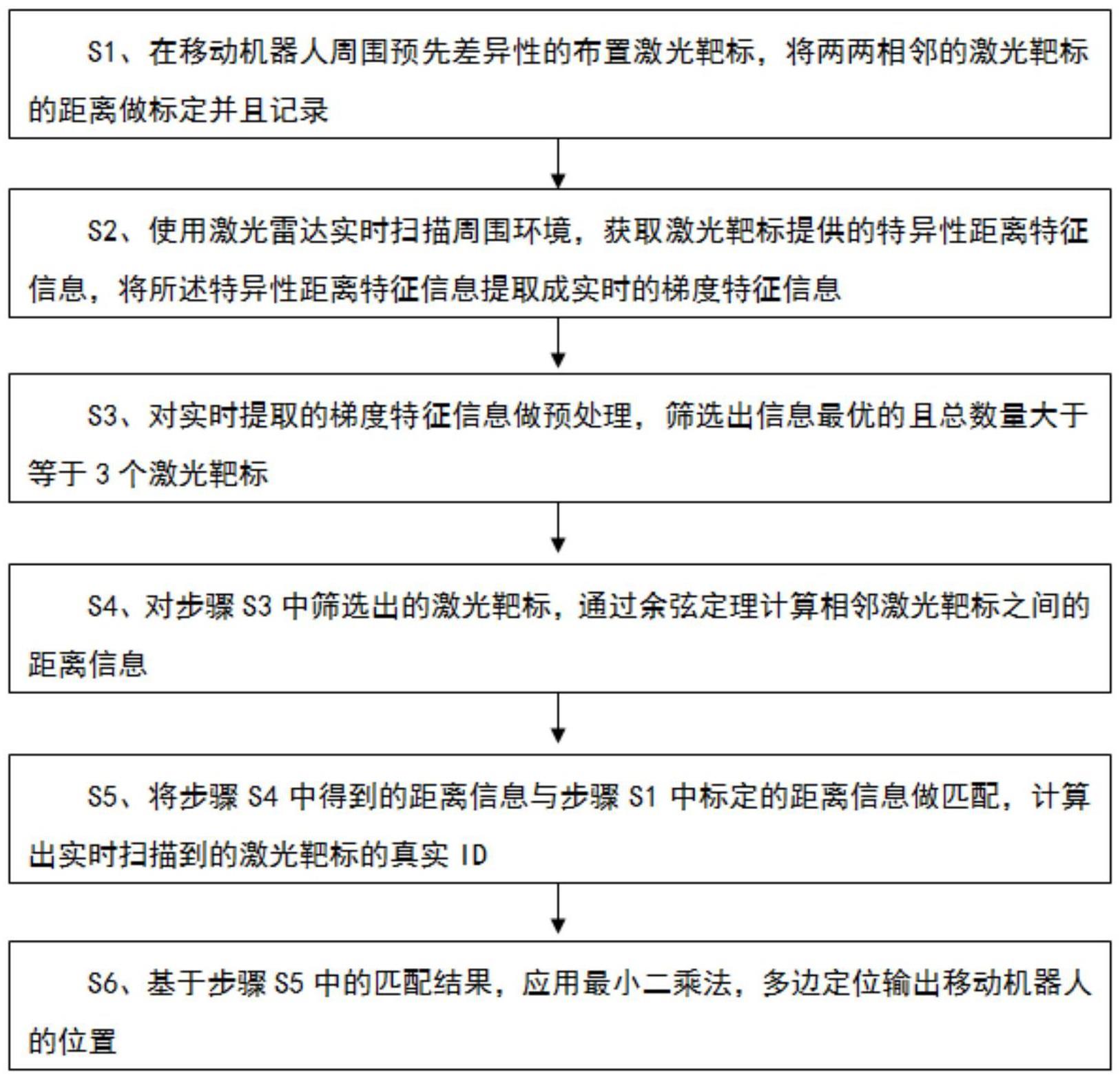
4、s1、在移动机器人周围预先差异性的布置激光靶标,其中,安装在移动机器人上的激光雷达和低成本激光靶标在同一水平线上,将两两相邻的激光靶标的距离做标定并且记录;
5、s2、使用激光雷达实时扫描周围环境,获取激光靶标提供的特异性距离特征信息,将所述特异性距离特征信息提取成实时的梯度特征信息;
6、s3、对实时提取的梯度特征信息做预处理,筛选出信息最优的且总数量大于等于3个激光靶标;
7、s4、对步骤s3中筛选出的激光靶标,通过余弦定理计算相邻激光靶标之间的距离信息;
8、s5、将步骤s4中得到的距离信息与步骤s1中标定的距离信息做匹配,计算出实时扫描到的激光靶标的真实id;
9、s6、基于步骤s5中的匹配结果,应用最小二乘法,多边定位输出移动机器人的位置。
10、作为一优选项,一种低成本的室内移动机器人激光靶标定位方法,所述将两两相邻的激光靶标的距离做标定,包括:
11、采用激光测距仪或卷尺测量两两激光靶标之间的距离。
12、作为一优选项,一种低成本的室内移动机器人激光靶标定位方法,所述激光雷达为单线激光雷达。
13、作为一优选项,一种低成本的室内移动机器人激光靶标定位方法,所述步骤s3具体包括:
14、s31、预先测量激光靶标的宽度或直径,计算得到激光雷达距离激光靶标最近时能扫到激光靶标上面的点数,记录这个点数n;
15、s32、若激光雷达扫描到某处有放置激光靶标或干扰物体则对应梯度特征表现为跃变的负值,记录此处a;
16、s33、从a处开始,继续向后依次查找梯度特征,若在n次内找到梯度跃变的正值,记录此处b,表明b处对应放置有激光靶标;
17、s34、重复步骤s33直至寻找到大于或等于三个激光靶标。
18、作为一优选项,一种低成本的室内移动机器人激光靶标定位方法,所述重复步骤s33直至寻找到大于或等于三个激光靶标,包括:
19、设置一个信号强度阈值i,根据所述信号强度阈值i筛选出信息最优的且总数量大于或等于三个的激光靶标。
20、作为一优选项,一种低成本的室内移动机器人激光靶标定位方法,所述步骤s5具体包括:
21、s51、设置匹配误差阈值e,在匹配之前如果检测到的激光靶标大于预设的激光靶标总个数,则直接判定为匹配失败;
22、s52、建立参考距离矩阵ref_dist以及检测距离矩阵test_dist;
23、s53、遍历匹配参考距离矩阵ref_dist以及检测距离矩阵test_dist,当满足匹配条件|ref_dist[i][j]-test_dist[0][0]|<e时,转至步骤s54,其中,ref_dist[i][j]表示参考距离矩阵中任意元素,test_dist[0][0]表示检测距离矩阵中第一个元素;
24、s54、从步骤s53中匹配成功的地方依次向右遍历匹配检测距离矩阵test_dist第一行剩余元素,若检测距离矩阵test_dist第一行都能匹配成功,则记录检测到的第一块激光靶标对应的实际预设激光靶标真实id,转至步骤s55,否则转至步骤s53;
25、s55、匹配检测距离矩阵test_dist剩余的行,若所有的行都能匹配成功,则返回test_dist各行对应的实际预设激光靶标真实id,若存在匹配失败的情况,则跳转至步骤s53。
26、作为一优选项,一种低成本的室内移动机器人激光靶标定位方法,所述步骤s6具体包括:
27、根据与多个激光靶标相应的测距结果,寻找一个使测距误差对定位精度影响最小的点,并以该点作为移动机器人的位置。
28、在第二方面,提供一种低成本的室内移动机器人激光靶标定位系统,所述系统包括:
29、激光靶标布置及标定模块,配置为在移动机器人周围预先差异性的布置激光靶标,其中,安装在移动机器人上的激光雷达和低成本激光靶标在同一水平线上,将两两相邻的激光靶标的距离做标定并且记录;
30、梯度特征提取模块,配置为使用激光雷达实时扫描周围环境,获取激光靶标提供的特异性距离特征信息,将所述特异性距离特征信息提取成实时的梯度特征信息;
31、梯度特征预处理模块,配置为对实时提取的梯度特征信息做预处理,筛选出信息最优的且总数量大于等于3个激光靶标;
32、距离计算模块,配置为对筛选出的激光靶标,通过余弦定理计算相邻激光靶标之间的距离信息;
33、距离信息匹配模块,配置为将距离计算模块中得到的距离信息与激光靶标布置及标定模块中标定的距离信息做匹配,计算出实时扫描到的激光靶标的真实id;
34、定位模块,配置为基于距离信息匹配模块中的匹配结果,应用最小二乘法,多边定位输出移动机器人的位置。
35、在第三方面,提供一种计算机存储介质,其上存储有计算机指令,所述计算机指令运行时执行任意一项所述一种低成本的室内移动机器人激光靶标定位方法中相关步骤。
36、在第四方面,提供一种终端,包括存储器和处理器,存储器上存储有可在处理器上运行的计算机指令,处理器运行计算机指令时执行任意一项所述一种低成本的室内移动机器人激光靶标定位方法中相关步骤。
37、需要进一步说明的是,上述各选项对应的技术特征在不冲突的情况下可以相互组合或替换构成新的技术方案。
38、与现有技术相比,本发明有益效果是:
39、本发明通过在移动机器人周围预先差异性的布置激光靶标,方面后续算法中匹配单线激光雷达实时扫描到激光靶标的真实id,通过低成本激光靶标提供距离梯度特征信息,基于此实现定位算法,应用低成本激光靶标作为特征参考物,而不是目前普遍使用的反光板,解决了反光板适应性差,有时无法和周围环境实现信号强度区分的问题。同时仅使用单线激光雷达传感器实现超低成本室内移动机器人定位,本发明方案明显适应性更高,成本非常低,易于布置,仅仅依靠可靠有效的算法就能达到相同的定位精度。
- 还没有人留言评论。精彩留言会获得点赞!