多路径环境中的直接及反射导航卫星信号参数的检测及估计的制作方法
本公开大体上涉及用于使用导航卫星实施地理位置确定的方法、系统及设备,且更具体来说,涉及用于实施多路径环境中的直接及反射导航卫星(例如,全球导航卫星系统(“gnss”)等)信号参数的检测及估计的方法、系统及设备。
背景技术:
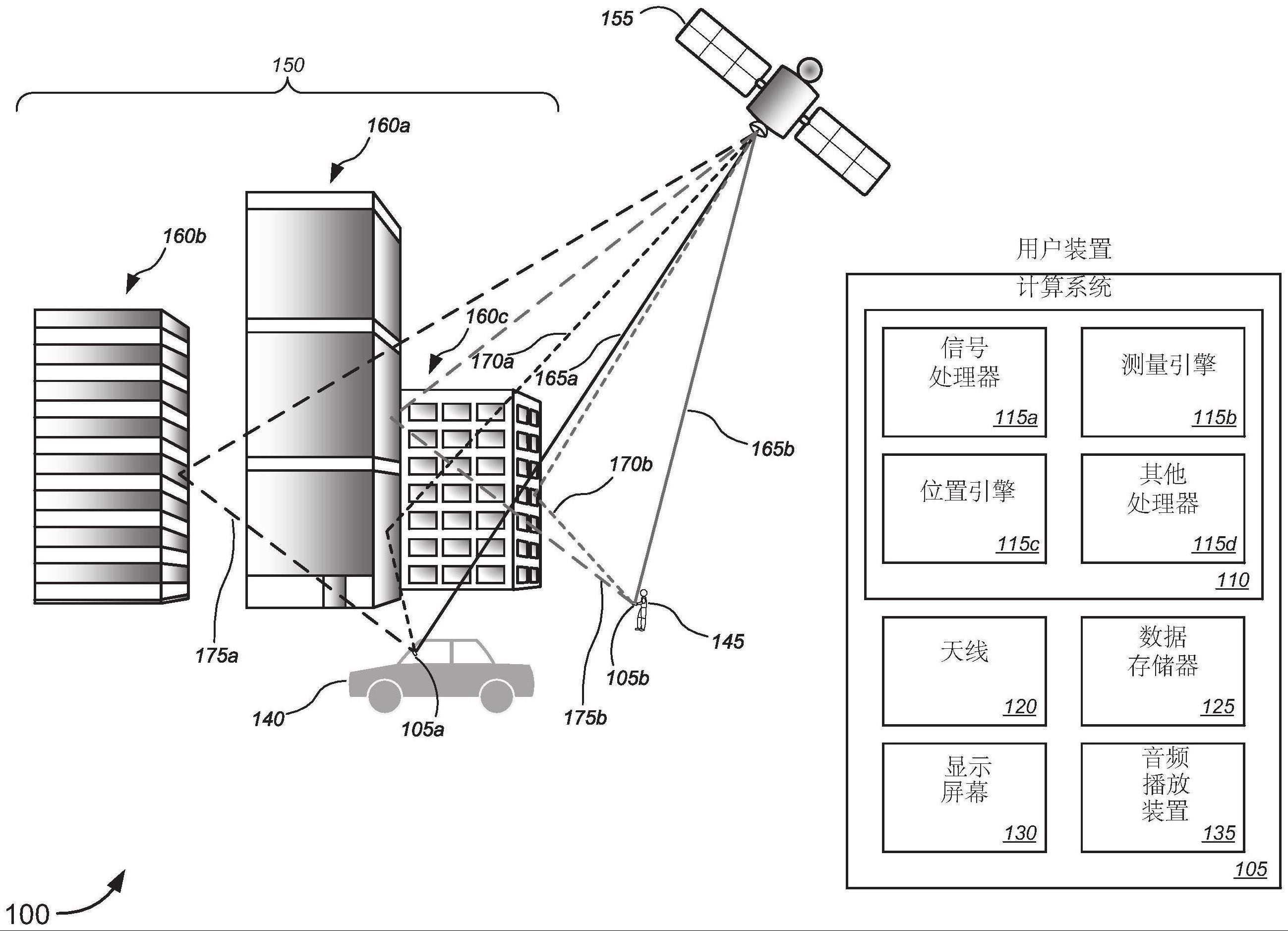
1、多路径(“mp”)信号是gnss接收器的关键误差源。在城市环境中,gnss接收器可观测来自卫星的直接视线(“los”)信号,及/或反射邻近物体(例如,建筑物)的一或多个非视线(“nlos”)信号。gnss导航接收器中的测量引擎(“me”)负责向位置引擎(“pe”)提供无偏los伪距、多普勒及载波相位测量。在多路径环境中,归因于mp信号,me可能产生有偏测量(其随后发送到pe),从而导致导航解决方案的较差准确性。在常规gnss接收器中,每一跟踪通道仅提供单组测量的事实使情况变得更复杂。
2、因此,需要用于使用导航卫星实施地理位置确定的更稳健及可扩展的解决方案,且更具体来说,需要用于实施多路径环境中的直接及反射导航卫星(例如,gnss等)信号参数的检测及估计的方法、系统及设备。
技术实现思路
1、本公开的技术大体上涉及用于使用导航卫星实施地理位置确定的工具及技术,且更具体来说,涉及用于实施多路径环境中的直接及反射导航卫星(例如,gnss等)信号参数的检测及估计的方法、系统及设备。
2、在一个方面中,提供一种安置在用户装置内的半导体封装。所述半导体封装包括逻辑,所述逻辑经配置以:基于对从第一卫星接收的多个信号的分析来识别落在跨越沿着第一维度的第一组码延迟值及沿着第二维度的第一组频率偏移值的跟踪孔径内的两个或更多个信号峰值,所述多个信号中的每一者在多路径(“mp”)环境内沿着所述第一卫星与所述用户装置之间的不同路径行进,所述所识别的两个或更多个信号峰值对应于所述多个信号当中的两个或更多个信号,其相对码延迟及相对频率偏移落在所述跟踪孔径的所述第一组码延迟值及所述第一组频率偏移值内;基于对来自所述所识别的两个或更多个信号峰值当中的至少一个信号峰值的信号参数的测量来确定所述至少一个信号峰值中的每一者的一或多个峰值参数估计;及将对所述至少一个信号峰值中的每一者的所述所确定的一或多个峰值参数估计提供到所述用户装置的位置引擎(“pe”),所述位置引擎经配置以至少部分基于所述所确定的一或多个峰值参数估计来计算所述用户装置的导航解决方案。
3、在一些实施例中,所述逻辑经进一步配置以:将所述多个卫星信号当中的每一卫星信号频移到基带频率;将每一频移卫星信号与相关联于所述第一卫星的伪随机数(“prn”)码序列进行卷积以产生时序化同相及正交(“i/q”)流,其中所述时序化基带i/q流包括多个i/q样本流,其中每一i/q样本流从中心或对准(prompt)相位码相移达抽头间隔的倍数,其中所述抽头间隔对应于基于所述prn码序列的码延迟,其中所述抽头间隔的所述倍数共同对应于由多个prn码偏移定义的多个码抽头,其中每一i/q样本流对应于在预定积分(“pdi”)时间内的码相移i/q信号;及将每一频移信号的所述所产生的时序化基带i/q流作为i/q样本的二维(“2d”)阵列存储在所述卫星导航装置的后相关缓冲器(“pcb”)中,所述i/q样本通过沿着所述2d阵列的第一维度的码抽头及沿着所述2d阵列的第二维度的后相关样本索引来存储。
4、根据一些实施例,所述逻辑经进一步配置以:通过实施包括最外循环、中级循环及最内循环的三级迭代循环来产生网格能量值的2d阵列,所述网格能量值在由所述mtc产生的所有码抽头的可编程持续时间、多个频率格及可编程格间隔内相干地及非相干地积分,其中实施所述三级迭代循环包括针对所述多个码抽头中的每一者的所述多个频率格中的每一者重复以下操作:使用所述最外循环在存储在所述pcb中的所述多个码抽头当中选择一个码抽头以输入到所述gp中;使用所述中级循环选择要应用于所述选定码抽头的格频率;及使用所述最内循环通过所述gp处理对应于所述选定码抽头的i/q样本流以产生所述选定码抽头及所述选定频率格的当前标量网格能量值;及将所述多个码抽头中的每一者的所述多个频率格中的每一者的所述当前标量网格能量值存储或存储且累加在所述卫星导航装置的能量网格缓冲器(“egb”)中,所述当前标量网格能量值通过沿着所述2d阵列的第一维度的码抽头及沿着所述2d阵列的第二维度的频率格来存储。
5、在一些实施例中,所述逻辑经进一步配置以:识别所述egb内出现能量峰值的至少一个位置,其中每一能量峰值对应于超过预定能量阈值的当前标量网格能量值,其中所述egb内的所述至少一个位置当中的每一所识别位置对应于与每一能量峰值相关联的码抽头及频率格;确定对应于每一能量峰值的至少一个信号参数估计,所述至少一个信号参数估计包括峰值粗频率估计、使用峰值拟合的经细化峰值码相位估计或经细化峰值信号强度(“cno”)估计中的至少一者;及将所识别的能量峰值的列表及对应所确定的至少一个信号参数估计存储在多峰值报告(“mpr”)缓冲器中。
6、根据一些实施例,所述逻辑经进一步配置以:基于存储在所述mpr缓冲器中的所识别的能量峰值的所述列表及对应所确定的至少一个信号参数估计来识别所述pcb中对应于每一所识别的能量峰值的最近码抽头;将至少一个算法应用于对应于所述所识别的最近码抽头的所述i/q样本以细化频率估计、相位估计或导航数据位估计中的至少一者,其中所述至少一个算法包括锁相环(“pll”)算法、锁频环(“fll”)算法或开环lag-n复叉积算法中的至少一者;及将所述频率估计、所述相位估计或所述导航数据位估计中的所述经细化至少一者存储在所述mpr缓冲器中,其中所述mpr缓冲器中的所述频率估计、所述相位估计或所述导航数据位估计中的所述经细化至少一者对应于所述一或多个峰值参数估计。在一些情况下,将所述至少一个信号峰值中的每一者的所述所确定的一或多个峰值参数估计提供到所述pe包括将所述频率估计、所述相位估计或所述导航数据位估计中的所述经细化至少一者发送到所述pe。
7、在一些实施例中,基于确定出现两个或更多个能量峰值,所述两个或更多个能量峰值中的一者被确定为直接视线(“los”)信号,且所述两个或更多个能量峰值中的其它能量峰值被确定为一或多个反射非视线(“nlos”)信号,所述逻辑经进一步配置以:分析对应于每一反射nlos信号的能量峰值的所述所确定的至少一个信号参数估计以确定每一反射nlos信号相对于所述直接los信号的相对mp偏差;响应于后续确定所述直接los信号已经丢失,通过基于每一反射nlos信号的所述所确定的相对mp偏差进行偏差校正来调整所述一或多个反射nlos信号中的至少一者以用作对应至少一个伪los信号;及响应于随后确定所述直接los信号已经再次被检测到及重新获取,用所述重新获取的直接los信号替换所述至少一个伪los信号。
8、根据一些实施例,基于确定出现两个或更多个能量峰值,所述两个或更多个能量峰值中的一者被确定为直接视线(“los”)信号,且所述两个或更多个能量峰值中的其它能量峰值被确定为一或多个反射非视线(“nlos”)信号,所述逻辑经进一步配置以:响应于确定所述直接los信号已经丢失,基于所述egb内对应于丢失之前的所述直接los信号的所述所识别的至少一个位置的外推,确定对应于所述所丢失的直接los信号的预测码抽头及预测频率格,且基于所述所确定的预测码抽头及所述所确定的预测频率格产生伪los信号;及响应于随后确定所述直接los信号已被再次检测到及重新获取,用所述重新获取的直接los信号替换所述伪los信号。
9、在一些实施例中,所述多个信号包括全球导航卫星系统(“gnss”)信号,其中来自所述所接收的多个信号的所述信号参数包括信号功率、码延迟、载波相位、载波频率或数据位及/或类似者中的至少一者。
10、根据一些实施例,所述逻辑经进一步配置以:确定所述两个或更多个信号中的一者是否是直接视线(“los”)信号,而不是从所述第一卫星接收的一或多个反射非视线(“nlos”)信号;及至少部分基于与所述直接los信号相关联的所述经测量信号参数来计算所述用户装置与所述第一卫星之间的los伪距、来自所述第一卫星的所述所识别的直接los信号的多普勒频移、或来自所述第一卫星的所述直接los信号的载波信号的相位中的至少一者。在一些情况下,所述至少一个信号峰值中的每一者的所述所确定的一或多个峰值参数估计包括所述los伪距、所述所识别的直接los信号的所述多普勒频移、或所述直接los信号的所述载波信号的所述相位及/或类似者中的所述所计算的至少一者。
11、在一些实施例中,所述逻辑经进一步配置以:确定所述两个或更多个卫星信号中的一者是否是最早检测到的信号或所述最早检测到的信号之后的最强检测到的信号中的至少一者,其中最早检测到的信号或所述最早检测到的信号之后的最强检测到的信号中的所述至少一者对应于所述至少一个信号峰值。
12、根据一些实施例,所述用户装置与两个或更多个卫星通信地耦合,且识别落在所述跟踪孔径内的所述两个或更多个信号峰值包括基于对从所述两个或更多个卫星中的每一者接收的多个卫星信号的分析来识别落在跨越沿着所述第一维度的所述第一组码延迟值及沿着所述第二维度的所述第一组频率偏移值的所述跟踪孔径内的两个或更多个信号峰值,所述多个卫星信号中的每一者在所述mp环境内沿着所述两个或更多卫星当中的每一卫星与所述用户装置之间的不同路径行进,所述所识别的两个或更多个信号峰值针对每一卫星对应于所述多个信号当中的两个或更多个信号,所述所识别的两个或更多个信号峰值针对所述两个或更多个卫星当中的其它卫星与所述多个信号当中的两个或更多个信号相关。
13、在一些实施例中,所述逻辑经进一步配置以:从自所述第一卫星接收的所述多个卫星信号收集来自高码片率频带及低码片率频带两者的测量;分析所述高码片率频带的所述所收集的测量以识别及放大所述低码片率频带的任何不确定性;及响应于识别及放大至少一个低码片率频带的不确定性,基于所述至少一个低码片率频带的所述所识别及放大的不确定性,依据多路径测量偏差的水平标记所述至少一个低码片率频带。
14、根据一些实施例,从所述第一卫星连续接收所述多个信号,且其中识别所述两个或更多个信号峰值,确定所述一或多个峰值参数及将所述至少一个信号峰值中的每一者的所述所确定的一或多个峰值参数估计提供到所述pe随着时间的推移连续执行。
15、在另一方面中,一种方法包括:使用用户装置的计算系统基于对从第一卫星接收的多个信号的分析来识别落在跨越沿着第一维度的第一组码延迟值及沿着第二维度的第一组频率偏移值的跟踪孔径内的两个或更多个信号峰值,所述多个信号中的每一者在多路径(“mp”)环境内沿着所述第一卫星与所述用户装置之间的不同路径行进,所述所识别的两个或更多个信号峰值对应于所述多个信号当中的两个或更多个信号,其相对码延迟及相对频率偏移落在所述跟踪孔径的所述第一组码延迟值及所述第一组频率偏移值内;使用所述计算系统基于对来自所述所识别的两个或更多信号峰值当中的至少一个信号峰值的信号参数的测量来确定所述至少一个信号峰值中的每一者的一或多个峰值参数估计;及使用所述计算系统将所述至少一个信号峰值中的每一者的所述所确定的一或多个峰值参数估计提供到所述用户装置的位置引擎(“pe”),所述位置引擎经配置以至少部分基于所述所确定的一或多个峰值参数估计来计算所述用户装置的导航解决方案。
16、在一些实施例中,所述计算系统包括多抽头相关器(“mtc”)、网格处理器(“gp”)、信号峰值检测器(“pd”)、峰值参数估计器(“ppe”)、测量引擎(“me”)、数字信号处理器(“dsp”)或其它处理器及/或类似者中的至少一者。
17、根据一些实施例,所述方法进一步包括:使用所述计算系统将所述多个信号当中的每一信号频移到基带频率;使用所述计算系统将每一频移信号与相关联于所述第一卫星的伪随机数(“prn”)码序列进行卷积以产生时序化基带同相及正交(“i/q”)流,其中所述时序化基带i/q流包括多个i/q样本流,其中每一i/q样本流从中心或对准相位码相移达抽头间隔的倍数,其中所述抽头间隔对应于基于所述prn码序列的码延迟,其中所述抽头间隔的所述倍数共同对应于由多个prn码偏移定义的多个码抽头,其中每一i/q样本流对应于在预定积分(“pdi”)时间内的码相移i/q信号;及使用所述计算系统将针对每一频移信号产生的所述时序化基带i/q流作为i/q样本的二维(“2d”)阵列存储在所述用户装置的后相关缓冲器(“pcb”)中,所述i/q样本通过沿着所述2d阵列的第一维度的码抽头及沿着所述2d阵列的第二维度的后相关样本索引来存储。
18、在一些实施例中,所述方法进一步包括:使用所述计算系统通过实施包括最外循环、中级循环及最内循环的三级迭代循环来产生网格能量值的2d阵列,所述网格能量值在由所述计算系统产生的所有码抽头的可编程持续时间、多个频率格及可编程格间隔内相干地及非相干地积分,其中实施所述三级迭代循环包括针对所述多个码抽头中的每一者的所述多个频率格中的每一者重复以下操作:使用所述最外循环在存储在所述pcb中的所述多个码抽头当中选择一个码抽头;使用所述中级循环选择要应用于所述选定码抽头的格频率;及使用所述最内循环处理对应于所述选定码抽头的i/q样本流以产生所述选定码抽头及所述选定频率格的当前标量网格能量值;及使用所述计算系统将所述多个码抽头中的每一者的所述多个频率格中的每一者的所述当前标量网格能量值存储或存储且累加在所述用户装置的能量网格缓冲器(“egb”)中,所述当前标量网格能量值通过沿着所述2d阵列的第一维度的码抽头及沿着所述2d阵列的第二维度的频率格来存储。
19、根据一些实施例,所述方法进一步包括:使用所述计算系统识别所述egb内出现能量峰值的至少一个位置,其中每一能量峰值对应于超过预定能量阈值的当前标量网格能量值,其中所述egb内的所述至少一个位置当中的每一所识别位置对应于与每一能量峰值相关联的码抽头及频率格,其中所述能量峰值对应于所述至少一个信号峰值中的每一者,其中与每一能量峰值相关联的所述码抽头及所述频率格分别对应于所述两个或更多个信号当中的信号的所述相对码延迟及所述相对频率偏移,所述信号对应于所述至少一个信号峰值中的每一者;使用所述计算系统确定对应于每一能量峰值的至少一个信号参数估计,所述至少一个信号参数估计包括峰值粗频率估计、使用峰值拟合的经细化峰值码相位估计或经细化峰值信号强度(“c/no”)估计中的至少一者;及使用所述计算系统将所识别的能量峰值的列表及对应所确定的至少一个信号参数估计存储在多峰值报告(“mpr”)缓冲器中。
20、在一些实施例中,所述方法进一步包括:使用所述计算系统基于存储在所述mpr缓冲器中的所识别的能量峰值的所述列表及对应所确定的至少一个信号参数估计来识别所述pcb中对应于每一所识别的能量峰值的最近码抽头;使用所述计算系统将至少一个算法应用于对应于所述所识别的最近码抽头的所述i/q样本以细化频率估计、相位估计或导航数据位估计中的至少一者,其中所述至少一个算法包括锁相环(“pll”)算法、锁频环(“fll”)算法或开环lag-n复叉积算法中的至少一者;及使用所述计算系统将所述频率估计、所述相位估计或所述导航数据位估计中的所述经细化至少一者存储在所述mpr缓冲器中,其中所述mpr缓冲器中的所述频率估计、所述相位估计或所述导航数据位估计中的所述经细化至少一者对应于所述一或多个峰值参数估计。在一些例项中,将所述至少一个信号峰值中的每一者的所述所确定的一或多个峰值参数估计提供到所述pe包括使用所述计算系统将所述频率估计、所述相位估计或所述导航数据位估计中的所述经细化至少一者发送到所述pe。
21、在又一方面中,提供一种卫星导航装置。所述卫星导航装置包括:计算系统,其包括:至少一个第一处理器;及第一非暂时性计算机可读媒体,其通信地耦合到所述至少一个第一处理器,所述第一非暂时性计算机可读媒体具有存储在其上的计算机软件,所述计算机软件包括第一组指令,所述第一组指令当由所述至少一个第一处理器执行时使所述计算系统:基于对从第一卫星接收的多个信号的分析来识别落在跨越沿着第一维度的第一组码延迟值及沿着第二维度的第一组频率偏移值的跟踪孔径内的两个或更多个信号峰值,所述多个信号中的每一者在多路径(“mp”)环境内沿着所述第一卫星与所述卫星导航装置之间的不同路径行进,所述所识别的两个或更多个信号峰值对应于所述多个信号当中的两个或更多个信号,其相对码延迟及相对频率偏移落在所述跟踪孔径的所述第一组码延迟值及所述第一组频率偏移值内;基于对来自所述所识别的两个或更多信号峰值当中的至少一个信号峰值的信号参数的测量来确定所述至少一个信号峰值中的每一者的一或多个峰值参数估计;及将所述至少一个信号峰值中的每一者的所述所确定的一或多个峰值参数估计提供到所述卫星导航装置的位置引擎(“pe”),所述位置引擎经配置以至少部分基于所述所确定的一或多个峰值参数估计来计算所述卫星导航装置的导航解决方案。
22、在不脱离本发明的范围的情况下,可对所讨论的实施例进行各种修改及添加。例如,虽然上文描述的实施例涉及特定特征,但本发明的范围还包含具有不同特征组合的实施例及不包含所有上文描述的特征的实施例。
23、在附图及下文描述中阐述本公开的一或多个方面的细节。将从描述及图式,且从权利要求书明白本公开中描述的其它特征、目标及优点。
- 还没有人留言评论。精彩留言会获得点赞!