基于超声波的物体检测系统、方法、装置、介质及设备与流程
本技术实施例属于超声波,尤其涉及一种基于超声波的物体检测系统、方法、装置、介质及设备。
背景技术:
1、超声波是一种波长极短的机械波,在空气中波长一般短于2cm。由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,所以超声波经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
2、在车辆行驶过程中,可以基于超声波的物体检测系统检测车辆前方或者周围是否存在障碍物,以防发生碰撞。如图1所示,该基于超声波的物体检测系统包括cpu(centralprocessing unit,中央处理器)、超声波发送电路、超声波麦克风、滤波放大电路和相关运算电路,cpu可以将生成的某频率的chirp波通过超声波发送电路传输给超声波麦克风,由超声波麦克风将chirp波在空气中传输,当chirp波遇到物体时就会反射回超声波麦克风,并经滤波放大电路放大后进入相关运算电路,由相关运算电路对放大后的反射波和cpu生成的参照波进行相关运算,包括每个时刻的数值进行相乘累加计算,获得相关值波形,最后由cpu通过判断相关值波形中是否存在大于预设相关值阈值的相关值,来确定是否存在障碍物,并且可以根据接收时间确定车辆与障碍物之间的距离。然而,虽然该系统可以输出物体的距离,但不能判定是来自正面物体的反射波还是来自路面物体的反射波,其中,正面物体是指车辆正对面的、相对较高的物体,路面物体是指路面上相对较低的物体,因此,存在将正面物体和路面物体互相误检的问题。
技术实现思路
1、本技术提供了一种基于超声波的物体检测系统、方法、装置、介质及设备,能够解决相关技术中基于超声波的物体检测时存在的将正面物体和路面物体互相误检的问题。
2、具体的技术方案如下:
3、第一方面,本技术实施例提供了一种基于超声波的物体检测系统,所述系统包括中央处理器cpu、超声波发送电路、超声波麦克风、第一滤波放大电路、第二滤波放大电路、第一相关运算电路和第二相关运算电路;
4、所述cpu分别与所述超声波发送电路、所述第一相关运算电路、所述第二相关运算电路连接,所述超声波麦克风分别与所述超声波发送电路、所述第一滤波放大电路、所述第二滤波放大电路连接,所述第一滤波放大电路与所述第一相关运算电路连接,所述第二滤波放大电路与所述第二相关运算电路连接;
5、所述cpu,用于按照预设检测周期交替生成第一发送波和第二发送波,并将所述第一发送波和所述第二发送波通过所述超声波发送电路传输给所述超声波麦克风,所述第一发送波和所述第二发送波为不同频率的超声发送波;
6、所述超声波麦克风,用于接收所述第一发送波对应的第一物体反射波,并将所述第一物体反射波传输给所述第一滤波放大电路,以及接收所述第二发送波对应的第二物体反射波,并将所述第二物体反射波传输给所述第二滤波放大电路;
7、所述第一相关运算电路,用于将所述cpu生成的第一参照波和所述第一滤波放大电路放大后的所述第一物体反射波进行相关运算,获得第一相关值数据列;
8、所述第二相关运算电路,用于将所述cpu生成的第二参照波和所述第二滤波放大电路放大后的所述第二物体反射波进行相关运算,获得第二相关值数据列;
9、所述cpu,还用于分别对所述第一相关值数据列和所述第二相关值数据列中位于同一个排列位置处的相关值峰值进行差分计算,获得针对每个排列位置处的峰值差分结果,将大于或者等于预设差分阈值的所述峰值差分结果所对应的物体,确定为正面物体,将小于所述预设差分阈值的所述峰值差分结果所对应的物体,确定为路面物体。
10、在一种实施方式中,所述cpu包括时间管理模块、超声波生成模块、参照波生成模块、数据列保存模块和判定模块;
11、所述时间管理模块与所述超声波生成模块连接,所述参照波生成模块与所述超声波生成模块连接,所述数据列保存模块分别与所述第一相关运算电路、所述第二相关运算电路和所述判定模块连接;
12、所述时间管理模块,用于按照所述预设检测周期向所述超声波生成模块发送时间控制信号;
13、所述超声波生成模块,用于根据所述时间控制信号交替生成所述第一发送波和所述第二发送波;
14、所述参照波生成模块,用于生成所述第一参照波和所述第二参照波;
15、所述数据列保存模块,用于保存所述第一相关值数据列和所述第二相关数据列;
16、所述判定模块,用于分别对所述第一相关值数据列和所述第二相关值数据列中位于同一个排列位置处的相关值峰值进行差分计算,获得针对每个排列位置处的峰值差分结果,将大于或者等于预设差分阈值的所述峰值差分结果所对应的物体,确定为正面物体,将小于所述预设差分阈值的所述峰值差分结果所对应的物体,确定为路面物体。
17、在一种实施方式中,所述判定模块,用于在车辆驶向物体时,对所述第一相关值数据列进行时间补偿,获得时间补偿后的所述第一相关值数据列,分别对所述时间补偿后的所述第一相关值数据列和所述第二相关值数据列中位于同一个排列位置处的相关值峰值进行差分计算,获得针对每个排列位置处的峰值差分结果;和/或,
18、在所述车辆驶离所述物体时,对所述第二相关值数据列进行时间补偿,获得时间补偿后的所述第二相关值数据列,分别对所述生成的第一相关值数据列和所述时间补偿后的所述第二相关值数据列中位于同一个排列位置处的相关值峰值进行差分计算,获得针对每个排列位置处的峰值差分结果。
19、在一种实施方式中,所述判定模块,用于在所述车辆驶向所述物体时,将所述第一相关值数据列中的每个相关值对应的生成时刻减去目标时间差,获得所述时间补偿后的所述第一相关值数据列;在所述车辆驶离所述物体时,将所述第二相关值数据列中的每个相关值对应的生成时刻减去所述目标时间差,获得所述时间补偿后的所述第二相关值数据列;
20、其中,所述目标时间差rev time=δl*(331.5+0.6*t)*1000;
21、其中,δl=v*1000/3600*cycle time/1000,所述t表示车外温度,所述v表示车速,所述cycle time表示所述预设检测周期。
22、第二方面,本技术实施例提供了一种基于超声波的物体检测方法,所述方法包括:
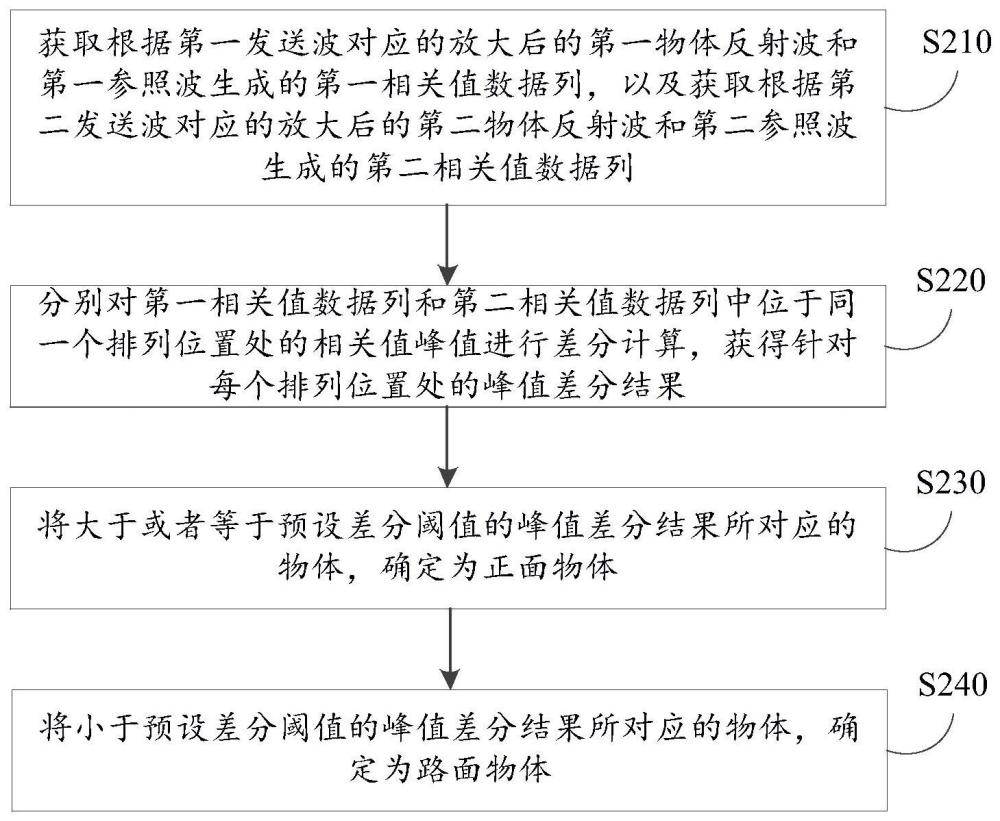
23、获取根据第一发送波对应的放大后的第一物体反射波和第一参照波生成的第一相关值数据列,以及获取根据第二发送波对应的放大后的第二物体反射波和第二参照波生成的第二相关值数据列,其中,所述第一发送波和所述第二发送波为不同频率的超声发送波,所述第一发送波与所述第二发送波按照预设检测周期交替发送,且所述第一发送波先于所述第二发送波发送;
24、分别对所述第一相关值数据列和所述第二相关值数据列中位于同一个排列位置处的相关值峰值进行差分计算,获得针对每个排列位置处的峰值差分结果;
25、将大于或者等于预设差分阈值的所述峰值差分结果所对应的物体,确定为正面物体;
26、将小于所述预设差分阈值的所述峰值差分结果所对应的物体,确定为路面物体。
27、在一种实施方式中,分别对所述第一相关值数据列和所述第二相关值数据列中位于同一个排列位置处的相关值峰值进行差分计算,获得针对每个排列位置处的峰值差分结果,包括:
28、在车辆驶向物体时,对所述第一相关值数据列进行时间补偿,获得时间补偿后的所述第一相关值数据列,分别对所述时间补偿后的所述第一相关值数据列和所述第二相关值数据列中位于同一个排列位置处的相关值峰值进行差分计算,获得针对每个排列位置处的峰值差分结果;和/或,
29、在所述车辆驶离所述物体时,对所述第二相关值数据列进行时间补偿,获得时间补偿后的所述第二相关值数据列,分别对所述生成的第一相关值数据列和所述时间补偿后的所述第二相关值数据列中位于同一个排列位置处的相关值峰值进行差分计算,获得针对每个排列位置处的峰值差分结果。
30、在一种实施方式中,在车辆驶向物体时,对所述第一相关值数据列进行时间补偿,获得时间补偿后的所述第一相关值数据列,包括:在所述车辆驶向所述物体时,将所述第一相关值数据列中的每个相关值对应的生成时刻减去目标时间差,获得所述时间补偿后的所述第一相关值数据列;
31、在所述车辆驶离所述物体时,对所述第二相关值数据列进行时间补偿,获得时间补偿后的所述第二相关值数据列,包括:在所述车辆驶离所述物体时,将所述第二相关值数据列中的每个相关值对应的生成时刻减去所述目标时间差,获得所述时间补偿后的所述第二相关值数据列;
32、其中,所述目标时间差rev time=δl*(331.5+0.6*t)*1000;
33、其中,δl=v*1000/3600*cycle time/1000,所述t表示车外温度,所述v表示车速,所述cycle time表示所述预设检测周期。
34、第三方面,本技术实施例提供了一种基于超声波的物体检测装置,所述装置包括:
35、获取单元,用于获取根据第一发送波对应的放大后的第一物体反射波和第一参照波生成的第一相关值数据列,以及获取根据第二发送波对应的放大后的第二物体反射波和第二参照波生成的第二相关值数据列,其中,所述第一发送波和所述第二发送波为不同频率的超声发送波,所述第一发送波与所述第二发送波按照预设检测周期交替发送,且所述第一发送波先于所述第二发送波发送;
36、计算单元,用于分别对所述第一相关值数据列和所述第二相关值数据列中位于同一个排列位置处的相关值峰值进行差分计算,获得针对每个排列位置处的峰值差分结果;
37、确定单元,用于将大于或者等于预设差分阈值的所述峰值差分结果所对应的物体,确定为正面物体,将小于所述预设差分阈值的所述峰值差分结果所对应的物体,确定为路面物体。
38、在一种实施方式中,所述计算单元,包括第一计算模块和/或第二计算模块;
39、所述第一计算模块,用于在车辆驶向物体时,对所述第一相关值数据列进行时间补偿,获得时间补偿后的所述第一相关值数据列,分别对所述时间补偿后的所述第一相关值数据列和所述第二相关值数据列中位于同一个排列位置处的相关值峰值进行差分计算,获得针对每个排列位置处的峰值差分结果;
40、所述第二计算模块,用于在所述车辆驶离所述物体时,对所述第二相关值数据列进行时间补偿,获得时间补偿后的所述第二相关值数据列,分别对所述生成的第一相关值数据列和所述时间补偿后的所述第二相关值数据列中位于同一个排列位置处的相关值峰值进行差分计算,获得针对每个排列位置处的峰值差分结果。
41、在一种实施方式中,所述第一计算模块,用于在所述车辆驶向所述物体时,将所述第一相关值数据列中的每个相关值对应的生成时刻减去目标时间差,获得所述时间补偿后的所述第一相关值数据列;
42、所述第二计算模块,用于在所述车辆驶离所述物体时,将所述第二相关值数据列中的每个相关值对应的生成时刻减去所述目标时间差,获得所述时间补偿后的所述第二相关值数据列;
43、其中,所述目标时间差rev time=δl*(331.5+0.6*t)*1000;
44、其中,δl=v*1000/3600*cycle time/1000,所述t表示车外温度,所述v表示车速,所述cycle time表示所述预设检测周期。
45、第四方面,本技术实施例提供了一种存储介质,其上存储有可执行指令,该指令被处理器执行时使处理器实现第二方面任一实施方式所述的方法。
46、第五方面,本技术实施例提供了一种电子设备,包括:
47、一个或多个处理器;
48、存储装置,用于存储一个或多个程序,
49、其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现第二方面任一实施方式所述的方法。
50、由上述内容可知,本技术实施例提供的基于超声波的物体检测系统、方法、装置、介质及设备,能够按照预设检测周期交替发送不同频率的第一发送波和第二发送波,并在根据第一发送波对应的放大后的第一物体反射波和第一参照波获得的第一相关值数据列,以及根据第二发送波对应的放大后的第二物体反射波和第二参照波获得的第二相关值数据列之后,可以分别对第一相关值数据列和第二相关值数据列中位于同一个排列位置处的相关值峰值进行差分计算,获得针对每个排列位置处的峰值差分结果,并将大于或者等于预设差分阈值的峰值差分结果所对应的物体,确定为正面物体,将小于预设差分阈值的峰值差分结果所对应的物体,确定为路面物体。因此,与只能够确定车辆与物体之间距离,而不能准确该物体是正面物体还是路面物体的相关技术相比,本技术实施例能够通过对不同频率的发送波对应的相关值数据列进行差分计算,准确确定出对应物体是正面物体还是路面物体,从而解决了将正面物体和路面物体互相误检的问题。当然,实施本技术的任一产品或方法并不一定需要同时达到以上所述的所有优点。
51、本技术实施例的创新点包括但不限于以下几点:
52、1、通过对不同频率的发送波对应的相关值数据列进行差分计算,准确确定出对应物体是正面物体还是路面物体,或者确定出对应物体是高物体还是低物体,从而解决了将正面物体和路面物体互相误检的问题。具体可以通过在原有基于超声波的物体检测系统中增加滤波放大电路和相关运算电路来分别获得第一相关值数据列和第二相关值数据列。
53、2、在车辆驶向物体时,可以在对第一相关值数据列进行时间补偿之后,再将两个相关值数据列进行差分计算,在车辆驶离物体时,可以在对第二相关值数据列进行时间补偿之后,再将两个相关值数据列进行差分计算,从而可以避免因车辆移动而使得第一相关值数据列和第二相关值数据列存在时差,从而可以提高物体判定的准确性。
54、3、通过将cpu划分成时间管理模块、超声波生成模块、参照波生成模块数据列保存模块和判定模块等多个功能模块进行处理,可以实现各个功能模块的并行开发与维护。
- 还没有人留言评论。精彩留言会获得点赞!