一种巡检机器人定位方法、系统和设备与流程
本发明涉及机器人定位,尤其涉及一种巡检机器人定位方法、系统和设备。
背景技术:
1、对于巡检机器人,导航定位是实现机器人准确巡检的关键技术。机器人在开始部署任务之前需要对巡检场地进行建图,并确定巡检点位、路径和区域,巡检机器人按照地图、点位、路径和区域,配合激光雷达、gps、imu(inertialmeasurementunit,惯性测量单元)和里程计等末端传感器进行机器人的实时定位与控制,从而完成对既定任务的巡检。对于gps数据而言,机器人在厂站生产区域范围内行走,gps会出现大幅度的跳变,无法完成可靠、稳定的精确定位,不能满足巡检要求。imu及里程计在运行一段时间后,存在雷击误差,无法实现在厂站的精确定位。因此,在巡检机器人定位中,通常以激光雷达为主,gps、imu和里程计仅作为辅助传感数据。激光雷达在实时定位与控制时通过获取激光测距信息,利用物体的几何及纹理特征完成定位。因此,在环境高度一致且狭小的空间或空旷无明显特征的场景,激光雷达环境检测末端实时控制与定位的准确性将受到影响,无法准确识别并完成实时可靠定位。同时,在狭小空间范围内,gps信号将失效,激光雷达也难以实现可靠的定位,机器人将无法完成定位,随着时间的推移,整个定位系统将发生混乱。因此,如何解决巡检机器人的定位准确性受限于厂站区域环境的问题,以保证在厂站区域内巡检的机器人定位的准确性,是本领域技术人员亟待解决的技术问题。
技术实现思路
1、本发明提供了一种巡检机器人定位方法、系统和设备,用于解决现有的巡检机器人定位准确性受限于厂站区域环境,可靠性低的技术问题。
2、有鉴于此,本发明第一方面提供了一种巡检机器人定位方法,包括:
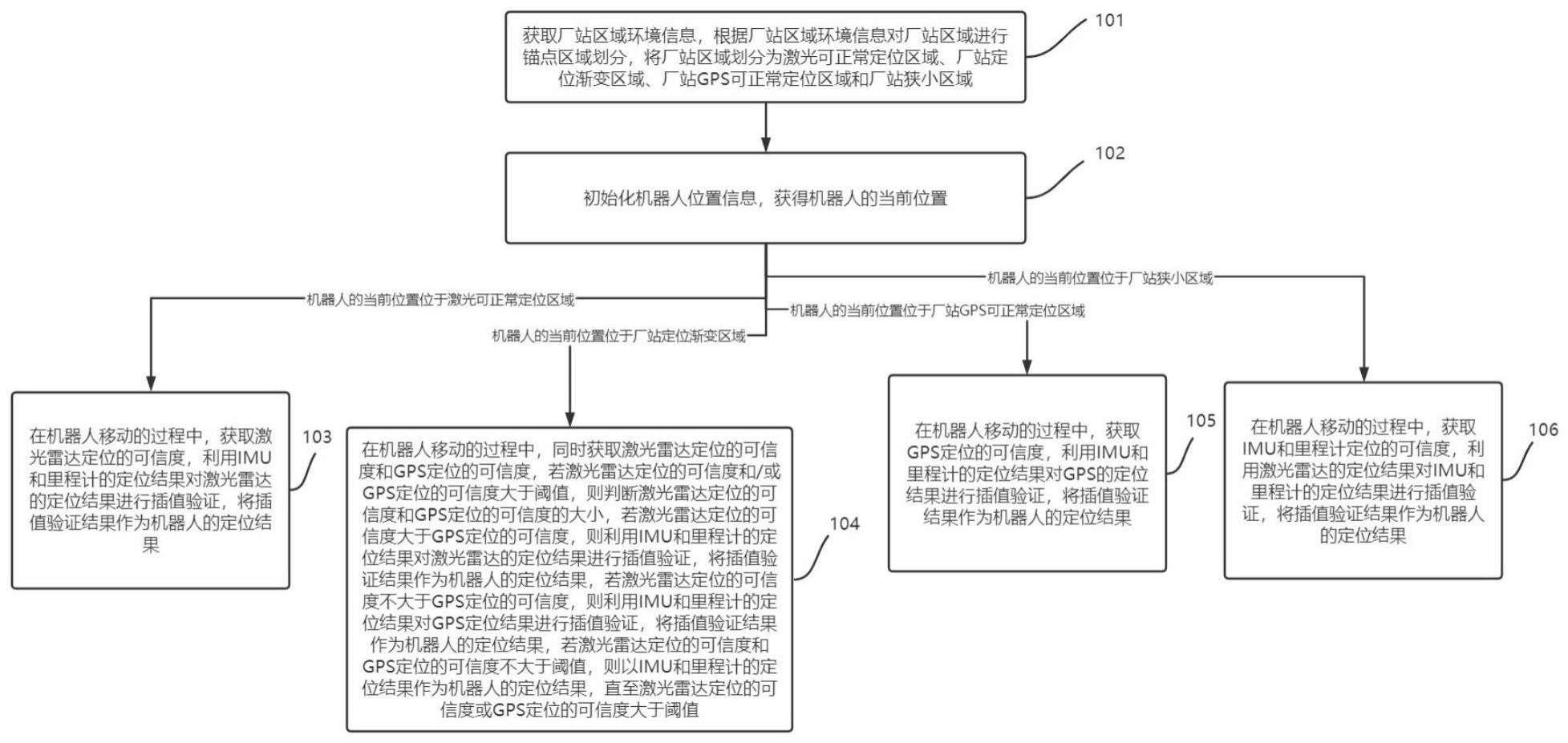
3、s1、获取厂站区域环境信息,根据厂站区域环境信息对厂站区域进行锚点区域划分,将厂站区域划分为激光可正常定位区域、厂站定位渐变区域、厂站gps可正常定位区域和厂站狭小区域;
4、s2、初始化机器人位置信息,获得机器人的当前位置,若机器人的当前位置位于激光可正常定位区域,则执行步骤s3,若机器人的当前位置位于厂站定位渐变区域,则执行步骤s4,若机器人的当前位置位于厂站gps可正常定位区域,则执行步骤s5,若机器人的当前位置位于厂站狭小区域,则执行步骤s6;
5、s3、若机器人的当前位置位于激光可正常定位区域,则在机器人移动的过程中,获取激光雷达定位的可信度,利用imu和里程计的定位结果对激光雷达的定位结果进行插值验证,将插值验证结果作为机器人的定位结果;
6、s4、若机器人的当前位置位于厂站定位渐变区域,则在机器人移动的过程中,同时获取激光雷达定位的可信度和gps定位的可信度,若激光雷达定位的可信度和/或gps定位的可信度大于阈值,则判断激光雷达定位的可信度和gps定位的可信度的大小,若激光雷达定位的可信度大于gps定位的可信度,则利用imu和里程计的定位结果对激光雷达的定位结果进行插值验证,将插值验证结果作为机器人的定位结果,若激光雷达定位的可信度不大于gps定位的可信度,则利用imu和里程计的定位结果对gps定位结果进行插值验证,将插值验证结果作为机器人的定位结果,若激光雷达定位的可信度和gps定位的可信度不大于阈值,则以imu和里程计的定位结果作为机器人的定位结果,直至激光雷达定位的可信度或gps定位的可信度大于阈值;
7、s5、若机器人的当前位置位于厂站gps可正常定位区域,则在机器人移动的过程中,获取gps定位的可信度,利用imu和里程计的定位结果对gps的定位结果进行插值验证,将插值验证结果作为机器人的定位结果;
8、s6、若机器人的当前位置位于厂站狭小区域,则在机器人移动的过程中,获取imu和里程计定位的可信度,利用激光雷达的定位结果对imu和里程计的定位结果进行插值验证,将插值验证结果作为机器人的定位结果。
9、可选地,步骤与s2之后还包括:
10、s7、机器人移动的过程中,判断机器人是否位于区域边界,若是,则获取imu和里程计定位的可信度,在机器人进入目标区域之前,采用源区域的定位可信度对imu和里程计定位结果进行插值验证,将插值验证结果作为机器人的定位结果,在机器人进入目标区域时,采用目标区域的定位可信度对imu和里程计定位结果进行插值验证,将插值验证结果作为机器人的定位结果,直至机器人完全进入目标区域。
11、可选地,步骤s1具体包括:
12、在机器人开机后,获取机器人的gps定位结果,若gps定位结果可信度满足要求,则将gps定位结果作为机器人的当前位置,若gps定位结果可信度不满足要求,则获取机器人关机前的位置坐标,利用激光雷达定位结果对机器人关机前的位置坐标进行校验,若校验通过,则以激光雷达定位结果作为机器人的当前位置,若校验不通过,则人工获取机器人的当前位置。
13、可选地,步骤s3具体包括:
14、s31、若机器人的当前位置位于激光可正常定位区域,则在机器人移动的过程中,获取激光雷达定位的可信度,利用imu和里程计的定位结果对激光雷达的定位结果进行插值验证;
15、s32、若激光雷达定位的可信度大于imu和里程计定位的可信度,则将激光雷达定位结果作为机器人的定位结果;
16、s33、若激光雷达定位的可信度不大于imu和里程计定位的可信度,则将imu和里程计定位结果作为机器人的定位结果,并将机器人的移动速度降为最小行进速度,控制机器人行进预置距离范围,若在机器人行进预置距离范围内,激光雷达定位的可信度大于imu和里程计定位的可信度,则恢复机器人的移动速度并返回步骤s32,若在机器人行进预置距离范围内,激光雷达定位的可信度不大于imu和里程计定位的可信度,则控制机器人停止移动,进入定位报警状态。
17、步骤s4具体包括:
18、s41、若机器人的当前位置位于厂站定位渐变区域,则在机器人移动的过程中,同时获取激光雷达定位的可信度和gps定位的可信度;
19、s42、若激光雷达定位的可信度和/或gps定位的可信度大于阈值,则判断激光雷达定位的可信度和gps定位的可信度的大小,若激光雷达定位的可信度大于gps定位的可信度,则利用imu和里程计的定位结果对激光雷达的定位结果进行插值验证,将插值验证结果作为机器人的定位结果,若激光雷达定位的可信度不大于gps定位的可信度,则利用imu和里程计的定位结果对gps定位结果进行插值验证,将插值验证结果作为机器人的定位结果;
20、s43、若激光雷达定位的可信度和gps定位的可信度不大于阈值,则以imu和里程计的定位结果作为机器人的定位结果,并将机器人的移动速度降为最小行进速度,控制机器人行进预置距离范围,若在机器人行进预置距离范围内,激光雷达定位的可信度和/或gps定位的可信度大于阈值,则恢复机器人的移动速度并返回步骤s42,若在机器人行进预置距离范围内,激光雷达定位的可信度和gps定位的可信度不大于阈值,则控制机器人停止移动,进入定位报警状态。
21、可选地,步骤s5具体包括:
22、s51、若机器人的当前位置位于厂站gps可正常定位区域,则在机器人移动的过程中,获取gps定位的可信度,利用imu和里程计的定位结果对激光雷达的定位结果进行插值验证;
23、s52、若gps定位的可信度大于imu和里程计定位的可信度,则将gps定位结果作为机器人的定位结果;
24、s53、若gps定位的可信度不大于imu和里程计定位的可信度,则将imu和里程计定位结果作为机器人的定位结果,并将机器人的移动速度降为最小行进速度,控制机器人行进预置距离范围,若在机器人行进预置距离范围内,gps定位的可信度大于imu和里程计定位的可信度,则恢复机器人的移动速度并返回步骤s52,若在机器人行进预置距离范围内,gps定位的可信度不大于imu和里程计定位的可信度,则控制机器人停止移动,进入定位报警状态。
25、本发明第二方面提供了一种巡检机器人定位系统,包括:
26、锚点区域划分模块,用于获取厂站区域环境信息,根据厂站区域环境信息对厂站区域进行锚点区域划分,将厂站区域划分为激光可正常定位区域、厂站定位渐变区域、厂站gps可正常定位区域和厂站狭小区域;
27、初始位置获取模块,用于初始化机器人位置信息,获得机器人的当前位置,若机器人的当前位置位于激光可正常定位区域,则执行第一处理模块,若机器人的当前位置位于厂站定位渐变区域,则执行第二处理模块,若机器人的当前位置位于厂站gps可正常定位区域,则执行第三处理模块,若机器人的当前位置位于厂站狭小区域,则执行第四处理模块;
28、第一处理模块,用于若机器人的当前位置位于激光可正常定位区域,则在机器人移动的过程中,获取激光雷达定位的可信度,利用imu和里程计的定位结果对激光雷达的定位结果进行插值验证,将插值验证结果作为机器人的定位结果;
29、第二处理模块,用于若机器人的当前位置位于厂站定位渐变区域,则在机器人移动的过程中,同时获取激光雷达定位的可信度和gps定位的可信度,若激光雷达定位的可信度和/或gps定位的可信度大于阈值,则判断激光雷达定位的可信度和gps定位的可信度的大小,若激光雷达定位的可信度大于gps定位的可信度,则利用imu和里程计的定位结果对激光雷达的定位结果进行插值验证,将插值验证结果作为机器人的定位结果,若激光雷达定位的可信度不大于gps定位的可信度,则利用imu和里程计的定位结果对gps定位结果进行插值验证,将插值验证结果作为机器人的定位结果,若激光雷达定位的可信度和gps定位的可信度不大于阈值,则以imu和里程计的定位结果作为机器人的定位结果,直至激光雷达定位的可信度或gps定位的可信度大于阈值;
30、第三处理模块,用于若机器人的当前位置位于厂站gps可正常定位区域,则在机器人移动的过程中,获取gps定位的可信度,利用imu和里程计的定位结果对gps的定位结果进行插值验证,将插值验证结果作为机器人的定位结果;
31、第四处理模块,用于若机器人的当前位置位于厂站狭小区域,则在机器人移动的过程中,获取imu和里程计定位的可信度,利用激光雷达的定位结果对imu和里程计的定位结果进行插值验证,将插值验证结果作为机器人的定位结果。
32、可选地,还包括:
33、边界判断模块,用于机器人移动的过程中,判断机器人是否位于区域边界,若是,则获取imu和里程计定位的可信度,在机器人进入目标区域之前,采用源区域的定位可信度对imu和里程计定位结果进行插值验证,将插值验证结果作为机器人的定位结果,在机器人进入目标区域时,采用目标区域的定位可信度对imu和里程计定位结果进行插值验证,将插值验证结果作为机器人的定位结果,直至机器人完全进入目标区域。
34、可选地,锚点区域划分模块具体用于:
35、在机器人开机后,获取机器人的gps定位结果,若gps定位结果可信度满足要求,则将gps定位结果作为机器人的当前位置,若gps定位结果可信度不满足要求,则获取机器人关机前的位置坐标,利用激光雷达定位结果对机器人关机前的位置坐标进行校验,若校验通过,则以激光雷达定位结果作为机器人的当前位置,若校验不通过,则人工获取机器人的当前位置。
36、本发明第三方面提供了一种巡检机器人定位设备,所述设备包括处理器以及存储器:
37、所述存储器用于存储程序代码,并将所述程序代码传输给所述处理器;
38、所述处理器用于根据所述程序代码中的指令执行第一方面任一种所述的巡检机器人定位方法。
39、从以上技术方案可以看出,本发明提供的巡检机器人定位方法具有以下优点:
40、本发明提供的巡检机器人定位方法,根据厂站区域的环境特征将厂站区域锚点划分为四种区域,分别为激光可正常定位区域、厂站定位渐变区域、厂站gps可正常定位区域和厂站狭小区域,在机器人开机后,获取机器人的当前位置信息,从而定位到机器人当前所处的锚点区域,根据所处锚点区域采用对应的定位策略进行定位,实现了在不同厂站区域环境下分别采用可信度高的激光雷达定位、gps定位、imu和里程计定位的方式来对机器人进行准确定位,解决了现有的巡检机器人定位准确性受限于厂站区域环境,可靠性低的技术问题。
41、同时,本发明提供的巡检机器人定位方法,还提供了针对机器人处于区域边界时的定位策略,实现了机器人定位的平滑切换,进一步保证了整个厂站的可靠定位。
42、本发明提供的巡检机器人定位装置和设备,用于执行本发明提供的巡检机器人定位方法,其原理和所取得的技术效果与本发明提供的巡检机器人定位方法相同,在此不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!