透明产品的缺陷位置检测方法及装置与流程
本公开涉及透明产品检测领域,尤其涉及一种透明产品的缺陷位置检测方法、装置、计算机设备及计算机可读存储介质。
背景技术:
1、显示面板、广告灯牌等领域会用到大量透明产品,这些透明产品包括玻璃等透明材质的成品或半成品。在具体工艺流程中,加工之前的缺陷检测不仅有助于提高良品率,还可以筛掉无法使用的废品,提高加工效率。例如,显示面板制作过程中需要使用光电玻璃作为玻璃基板进行电路蚀刻,受原材料和加工工艺影响,有些玻璃表面会存在数量不一的缺陷,这些缺陷在玻璃中的位置会严重影响镀膜蚀刻的成功率,因此需要在加工前筛选出因缺陷位置导致无法蚀刻的玻璃。
2、目前,对透明产品进行检测主要是通过相机多次拍摄分层,或者同时部署多台相机在不同角度进行拍摄,利用算法对拍摄得到的图像进行综合识别,以确定玻璃等透明产品表面的缺陷是否会严重影响后续加工过程的成功率。然而,这些检测方式需要布置复杂的检测机构,成本较高,占用空间大,且检测时间比较长,对产品流水线而言,整体效率低下。
技术实现思路
1、基于此,针对上述技术问题,提供一种透明产品的缺陷位置检测方法、装置、计算机设备、计算机可读存储介质。本公开的技术方案如下:
2、根据本公开实施例的一个方面,提供一种透明产品的缺陷位置检测方法,包括:
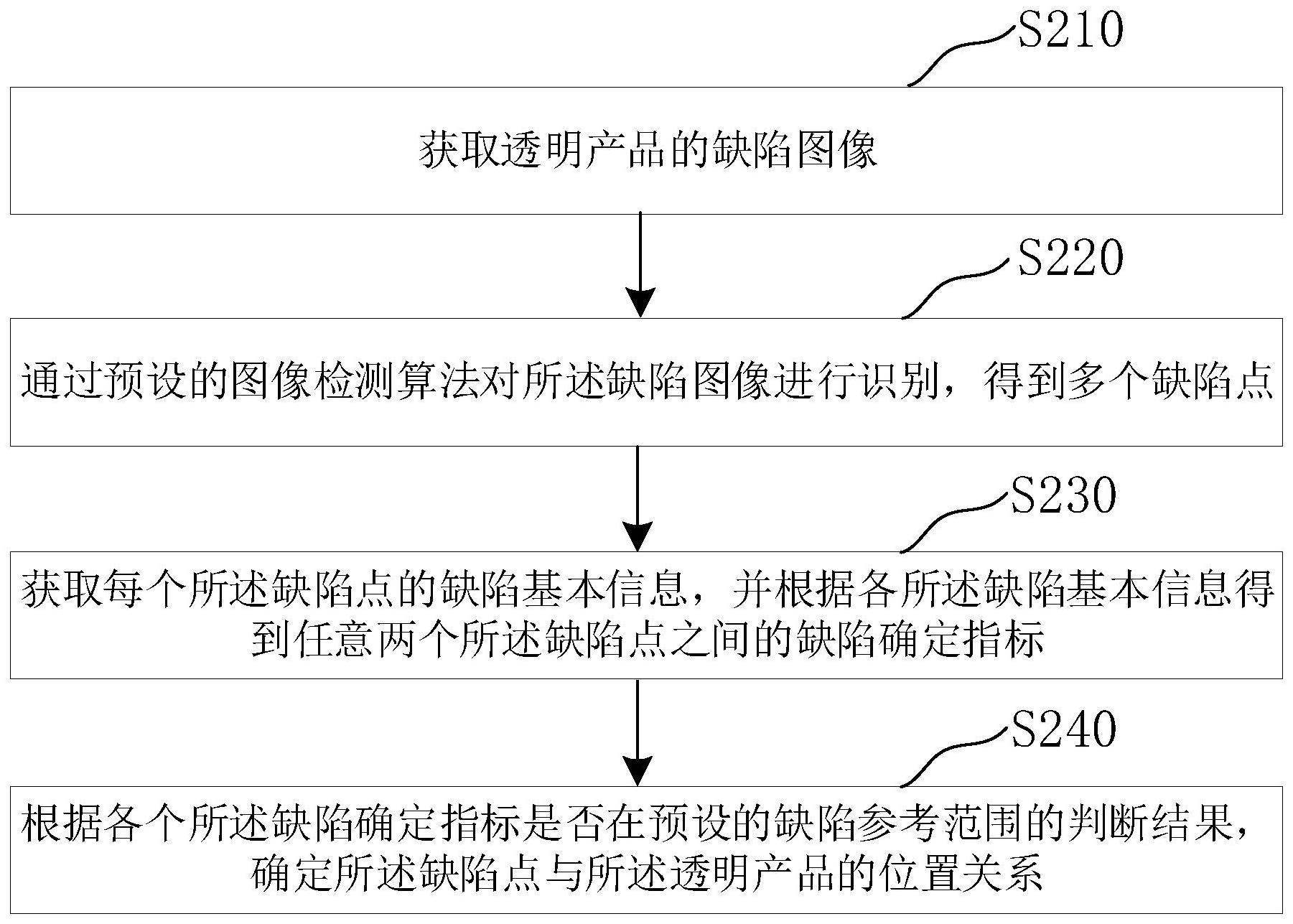
3、获取透明产品的缺陷图像;
4、通过预设的图像检测算法对所述缺陷图像进行识别,得到多个缺陷点;
5、获取每个所述缺陷点的缺陷基本信息,并根据各所述缺陷基本信息得到任意两个所述缺陷点之间的缺陷确定指标;所述缺陷确定指标用于确定两个缺陷点与所述透明产品的位置关系;
6、根据各个所述缺陷确定指标是否在预设的缺陷参考范围的判断结果,确定所述缺陷点与所述透明产品的位置关系。
7、在其中一个实施例中,所述获取透明产品的缺陷图像包括:
8、将透明产品置于预设的打光环境中;所述透明产品的一侧设置有不透明材料;
9、在所述透明产品未设置所述不透明材料的一侧,通过图像采集设备对所述透明产品进行拍摄,得到缺陷图像。
10、在其中一个实施例中,所述缺陷基本信息包括所述缺陷点的半径和质心坐标,所述缺陷确定指标的获取方法包括:
11、选取任意两个缺陷点分别作为第一缺陷点和第二缺陷点;
12、计算所述第一缺陷点与所述第二缺陷点的半径之比,将得到的比值作为尺寸对比系数;
13、根据所述第一缺陷点与所述第二缺陷点的质心坐标,计算所述第一缺陷点与所述第二缺陷点的相对距离;
14、根据所述第一缺陷点与所述第二缺陷点的质心坐标,计算所述第一缺陷点与所述第二缺陷点的相对角度;
15、根据所述尺寸对比系数、所述相对距离、所述相对角度,得到所述第一缺陷点与所述第二缺陷点对应的缺陷确定指标。
16、在其中一个实施例中,所述缺陷基本信息还包括所述缺陷点的平均灰度值,在根据所述尺寸对比系数、所述相对距离、所述相对角度,得到所述第一缺陷点与所述第二缺陷点对应的缺陷确定指标之后,还包括:
17、计算所述第一缺陷点与所述第二缺陷点的平均灰度值之比,将得到的比值作为灰度对比系数;
18、将所述灰度对比系数添加到所述缺陷确定指标中。
19、在其中一个实施例中,在根据所述尺寸对比系数、所述相对距离、所述相对角度,得到所述第一缺陷点与所述第二缺陷点对应的缺陷确定指标之后,还包括:
20、对所述缺陷图像进行边缘检测,得到所述第一缺陷点和第二缺陷点的纹理清晰度;
21、计算所述第一缺陷点与所述第二缺陷点的纹理清晰度之比,将得到的比值作为纹理清晰度对比系数;
22、将所述纹理清晰度对比系数添加到所述缺陷确定指标中。
23、在其中一个实施例中,在将所述纹理清晰度对比系数添加到所述缺陷确定指标中之后,还包括:
24、根据预设的权重比例,将所述尺寸对比系数、所述相对距离、所述相对角度、所述纹理清晰度对比系数分别与对应的比例系数相乘并对乘积进行累加,得到缺陷确定综合指标;
25、将所述缺陷确定指标替换为所述缺陷确定综合指标。
26、在其中一个实施例中,所述根据各个所述缺陷确定指标是否在预设的缺陷参考范围的判断结果,确定所述缺陷点与所述透明产品的位置关系包括:
27、任意选取一个缺陷确定指标与所述缺陷参考范围进行比较;
28、若所述缺陷确定指标在所述缺陷参考范围内,确定所述缺陷确定指标对应的两个缺陷点为同一缺陷在所述透明产品两面形成的实像和虚像;
29、继续选取其他缺陷确定指标与所述缺陷参考范围进行比较。
30、根据本公开实施例的另一方面,提供一种透明产品的缺陷位置检测装置,包括:
31、图像获取模块,用于获取透明产品的缺陷图像;
32、缺陷识别模块,用于通过预设的图像检测算法对所述缺陷图像进行识别,得到多个缺陷点;
33、指标生成模块,用于获取每个所述缺陷点的缺陷基本信息,并根据各所述缺陷基本信息得到任意两个所述缺陷点之间的缺陷确定指标;所述缺陷确定指标用于确定两个缺陷点与所述透明产品的位置关系;
34、缺陷确定模块,用于根据各个所述缺陷确定指标是否在预设的缺陷参考范围的判断结果,确定所述缺陷点与所述透明产品的位置关系。
35、根据本公开实施例的另一方面,还提供一种透明产品的缺陷图像采集方法,应用于图像采集设备,所述图像采集设备置于透明产品一侧,所述图像采集设备一侧还设有光源,所述采集方法包括:
36、在所述光源照射形成的预设打光环境下,对所述透明产品靠近所述图像采集设备的一侧表面进行图像采集,得到缺陷图像;
37、位于所述透明产品上远离所述图像采集设备一侧的缺陷会在所述透明产品远离所述图像采集设备的一侧表面形成一个实像,所述图像采集设备采集到一个实像缺陷点;
38、位于所述透明产品上靠近所述图像采集设备一侧的缺陷,除会在所述透明产品靠近所述图像采集设备的一侧表面形成一个实像外,还会在所述透明产品远离所述图像采集设备的一侧表面形成一个虚像,所述图像采集设备采集到一实像一虚像共两个缺陷点。
39、根据本公开实施例的另一方面,还提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述方法的步骤。
40、根据本公开实施例的另一方面,还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述方法的步骤。
41、根据本公开实施例的另一方面,还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现上述方法的步骤。
42、本公开实施例提供的技术方案中,可以获取透明产品的图像,并通过算法识别出图像中的缺陷点,再根据每个缺陷点的基本信息,可以得到这两个缺陷点对应的缺陷确定指标,将任一缺陷确定指标与预设参考范围进行比较,可以确定该缺陷确定指标对应的两个缺陷点是否为透明产品表面的同一缺陷。本方案透明产品的图像可以由面阵相机等设备一次拍摄得到,无需其他设备,不占用额外空间,缺陷位置检测过程可以通过算法自动得到结果,整个过程更易于实现,成本更低,检测时间更短,效率更高。
43、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
- 还没有人留言评论。精彩留言会获得点赞!