用于自动驾驶软件在环仿真测试的车道级导航方法和系统与流程
本发明涉及自动驾驶仿真测试的,更具体地,涉及一种用于自动驾驶软件在环仿真测试的车道级导航方法和系统。
背景技术:
1、在现实生活中,高精度导航系统一定是根据高精度地图匹配高精度定位来使用的,如果车辆定位本身精度不高,那边推荐导航的有效性和可靠性得不到保证。在仿真测试的环境中,如果将现实环境中所用的高精度导航运用起来,那么研究所花费的时间和成本往往都很高,并且实现的方法也十分复杂。在仿真环境中,不需要如现实环境要求的高精度定位系统,那么,发明一套简单有效、使用方便、适用于仿真测试精度的导航系统是十分有必要的。
2、现有技术公开了一种生成推荐导航路径的方法以及装置,包括:获取车辆当前位置信息和车辆目的地信息,根据车辆当前位置信息和目的地信息得到车辆从当前位置到达目的地的多条备选导航路径;获取每条备选导航路径的电子地图数据和车辆参数,根据每条备选导航路径的电子地图数据和车辆参数,依次判断是否存在能够通过车辆的导航路径;若判断结果为存在能够通过车辆的导航路径,将能够通过车辆的导航路径作为推荐导航路径提供给导航客户端,以使导航客户端展示相应的推荐导航路径。该申请为针对现实环境的车辆导航方法,根据车辆和道路的实际情况精确地获得最佳的导航路径;虽然一定程度上能够获得最佳的导航路径,但需要依靠高精度地图和高精度定位,计算花费的时间和成本很高,不适用于仿真环境,无法在仿真测试时高效获得最佳的导航路径。
技术实现思路
1、本发明为克服上述现有运用于仿真测试的车道级导航方法无法兼顾效率和准确性的缺陷,提供一种用于自动驾驶软件在环仿真测试的车道级导航方法和系统,能够在仿真场景高效获得最佳的导航路径,提升自动驾驶仿真测试的效率和准确性。
2、为解决上述技术问题,本发明的技术方案如下:
3、本发明提供了一种用于自动驾驶软件在环仿真测试的车道级导航方法,包括:
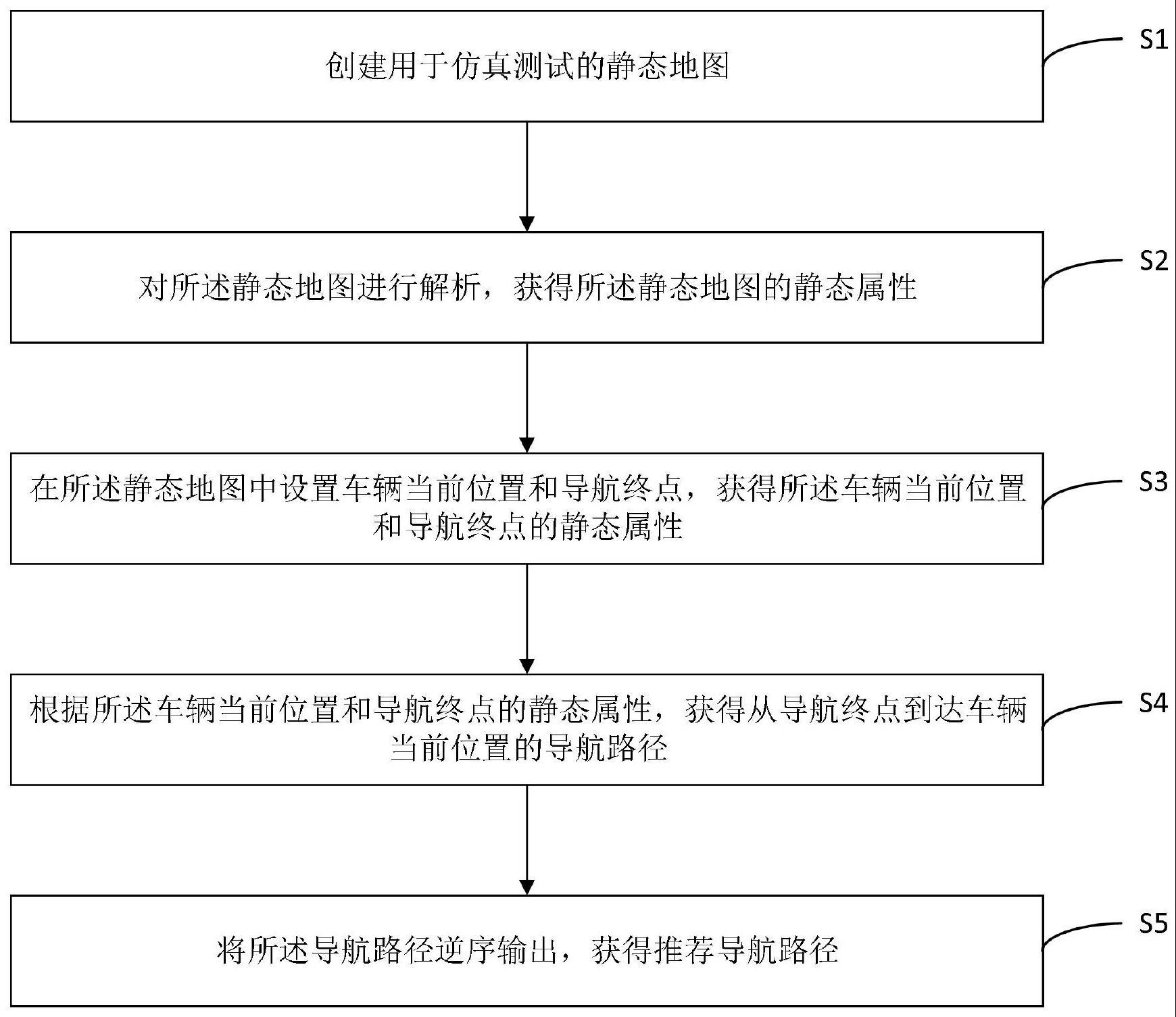
4、s1:创建用于仿真测试的静态地图;
5、s2:对所述静态地图进行解析,获得所述静态地图的静态属性;
6、s3:在所述静态地图中设置车辆当前位置和导航终点,获得所述车辆当前位置和导航终点的静态属性;
7、s4:根据所述车辆当前位置和导航终点的静态属性,获得从导航终点到达车辆当前位置的导航路径;
8、s5:将所述导航路径逆序输出,获得推荐导航路径。
9、优选地,所述静态地图包括车道及其连接关系、道路及其连接关系、目标物;所述车道的连接关系包括当前车道的前继车道、后驱车道和旁边车道;所述道路的连接关系包括当前道路的前继道路和后驱道路;每个所述道路包括至少一个车道。
10、优选地,所述静态地图的静态属性包括道路编号、道路数量、车道编号和车道数量。
11、优选地,所述车辆当前位置的静态属性为车辆当前位置在静态地图中的道路编号和车道编号,所述导航终点的静态属性为导航终点在静态地图中的道路编号和车道编号。
12、优选地,所述根据所述车辆当前位置和导航终点的静态属性,获得从导航终点到达车辆当前位置的导航路径的具体方法为:
13、s4.1:将导航终点的车道编号设置为推荐车道编号;
14、s4.2:基于车道的连接关系,搜索推荐车道编号对应的车道是否存在前继车道;若不存在,执行步骤s4.3;若存在,执行步骤s4.4;
15、s4.3:搜索推荐车道编号对应的车道的旁边车道是否存在前继车道;若不存在,对推荐车道编号对应的车道的剩余旁边车道执行步骤s4.3,直到搜索到前继车道;否则,执行步骤s4.4;
16、s4.4:判断前继车道的道路编号与车辆当前位置的道路编号是否相同;若不相同,执行步骤s4.5;否则,执行步骤s4.6;
17、s4.5:将前继车道的车道编号设置为新的推荐车道编号,重复步骤s4.2-s4.4,直到前继车道的道路编号与车辆当前位置的道路编号相同;
18、s4.6:按搜索的顺序保存推荐车道编号,作为从导航终点到达车辆当前位置的导航路径。
19、本发明还提供了一种用于自动驾驶软件在环仿真测试的车道级导航系统,用于实现上述的导航方法,包括:
20、地图文件模块,用于创建用于仿真测试的静态地图;
21、地图解析模块,用于对所述静态地图进行解析,获得所述静态地图的静态属性;
22、位置获取模块,用于在所述静态地图中设置车辆当前位置和导航终点,获得所述车辆当前位置和导航终点的静态属性;
23、寻路模块,用于根据所述车辆当前位置和导航终点的静态属性,获得从导航终点到达车辆当前位置的导航路径;
24、导航模块,用于将所述导航路径逆序输出,获得推荐导航路径。
25、优选地,所述地图文件模块中,静态地图包括车道及其连接关系、道路及其连接关系、目标物;所述车道的连接关系包括当前车道的前继车道、后驱车道和旁边车道;所述道路的连接关系包括当前道路的前继道路和后驱道路;每个所述道路包括至少一个车道。
26、优选地,所述地图解析模块中,所述静态地图的静态属性包括道路编号、道路数量、车道编号和车道数量。
27、优选地,所述位置获取模块中,车辆当前位置的静态属性为车辆当前位置在静态地图中的道路编号和车道编号,所述导航终点的静态属性为导航终点在静态地图中的道路编号和车道编号。
28、优选地,所述寻路模块中,根据所述车辆当前位置和导航终点的静态属性,获得从导航终点到达车辆当前位置的导航路径具体包括:
29、推荐车道设置单元,用于将导航终点的车道编号设置为推荐车道编号;
30、第一搜索单元,用于基于车道的连接关系,搜索推荐车道编号对应的车道是否存在前继车道;若不存在,转至第二搜索单元;若存在,转至判别单元;
31、第二搜索单元,用于搜索推荐车道编号对应的车道的旁边车道是否存在前继车道;若不存在,对推荐车道编号对应的车道的剩余旁边车道搜索前继车道,直到搜索到前继车道;否则,转至判别单元;
32、判别单元,用于判断前继车道的道路编号与车辆当前位置的道路编号是否相同;若不相同,转至推荐车道更新单元;否则,转至存储单元;
33、推荐车道更新单元,用于将前继车道的车道编号设置为新的推荐车道编号,返回第一搜索单元,直到前继车道的道路编号与车辆当前位置的道路编号相同;
34、存储单元,用于按搜索的顺序保存推荐车道编号,作为从导航终点到达车辆当前位置的导航路径。
35、与现有技术相比,本发明技术方案的有益效果是:
36、本发明首先创建用于仿真测试的静态地图,解析获得静态地图的静态属性;在静态地图中设置车辆当前位置和导航终点,根据车辆当前位置和导航终点的静态属性,获得从导航终点到达车辆当前位置的导航路径;将导航路径逆序输出,即获得从车辆当前位置到达导航终点的导航路径,作为推荐导航路径。本发明能够在高逼真的仿真测试场景中,高效获得最佳的导航路径,提升了自动驾驶仿真测试的效率和准确性。
- 还没有人留言评论。精彩留言会获得点赞!