雷达扫描控制方法及装置、激光雷达系统和可读存储介质与流程
本技术涉及激光雷达,具体而言,涉及一种雷达扫描控制方法及装置、激光雷达系统和可读存储介质。
背景技术:
1、随着科学技术的不断发展,激光雷达技术因其具有分辨率高、方向性好、抗干扰能力强、测距精度高、响应速度快、不受地面杂波影响等优势,被广泛应用于自动驾驶汽车、机器人巡航、安防监控等领域,其中基于mems(micro-electro-mechanical-system,微机电系统)振镜的激光雷达系统便是当今激光雷达技术的一项重要研究方向。
2、目前,基于mems振镜的激光雷达系统的雷达扫描控制方案是通过控制mems振镜在快轴方向和慢轴方向做简谐振动,并在mems振镜在快轴方向振动到指定角度时,按照特定频率(即等时间间隔)控制激光器经mems振镜对外发射激光,使发射的激光对应投射到被扫描对象上,从而实现对被扫描对象的激光打点扫描效果。
3、但值得注意的是,这种雷达扫描控制方案会因mems振镜转动到快轴视场角中心位置时的转动速度较快,而mems振镜转动到快轴视场角两侧位置时的转动速度较慢的特性,导致按照特定频率发射出的激光在快轴视场角范围内的中心位置附近的打点密度远远高于快轴视场角范围内的两侧位置附近的打点密度,无法实现快轴视场角范围内的激光均匀打点扫描效果,同时也往往会因mems振镜的实时谐振动作与激光器的激光发射时机没有实现同步控制,导致快轴视场角范围内的激光均匀打点扫描效果难以实现,无法有效确保对应激光雷达系统达到期望雷达分辨率和期望扫描点云分布效果。
技术实现思路
1、有鉴于此,本技术的目的在于提供一种雷达扫描控制方法及装置、激光雷达系统和可读存储介质,能够在单个慢轴运动周期中的涉及有效行扫描阶段的每个快轴振动周期内,按照特定快轴角度间隔地发射激光,以实现振镜快轴振动控制操作和激光发射动作之间的精准同步控制效果,并实现快轴视场角范围内的激光均匀打点扫描效果,确保对应激光雷达系统能够实现期望雷达分辨率和期望扫描点云效果。
2、为了实现上述目的,本技术实施例采用的技术方案如下:
3、第一方面,本技术提供一种雷达扫描控制方法,应用于激光雷达系统所包括的主控芯片,所述激光雷达系统还包括mems振镜和激光器,其中所述主控芯片与所述mems振镜电性连接,用于驱动所述mems振镜在快轴方向按照正弦波驱动信号做简谐振动,并驱动所述mems振镜在慢轴方向按照锯齿波驱动信号做线性往复运动;所述主控芯片与所述激光器电性连接,用于驱动所述激光器经所述mems振镜发射激光;所述方法包括:
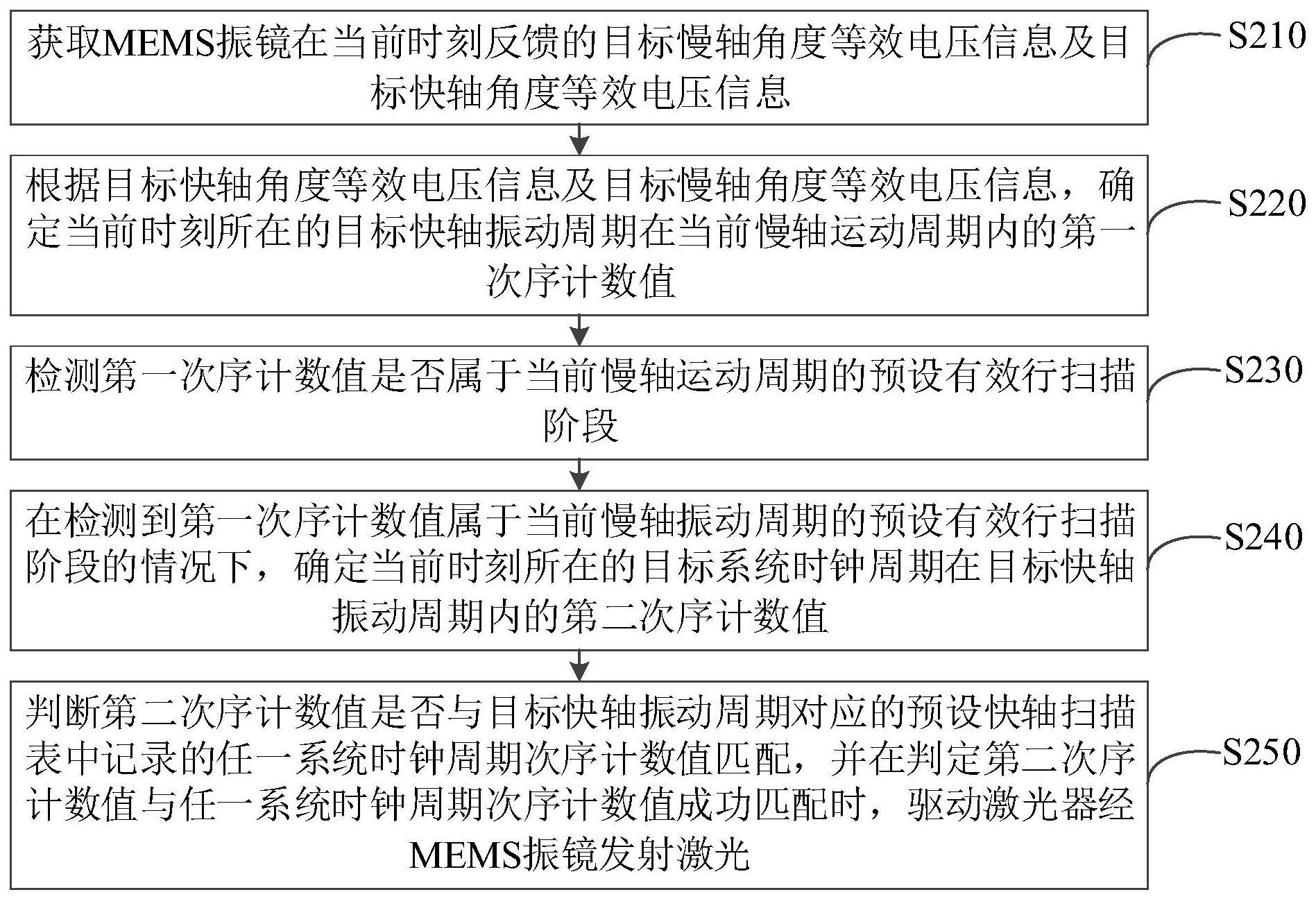
4、获取所述mems振镜在当前时刻反馈的目标慢轴角度等效电压信息及目标快轴角度等效电压信息;
5、根据所述目标快轴角度等效电压信息及所述目标慢轴角度等效电压信息,确定当前时刻所在的目标快轴振动周期在当前慢轴运动周期内的第一次序计数值;
6、检测所述第一次序计数值是否属于当前慢轴运动周期的预设有效行扫描阶段;
7、在检测到所述第一次序计数值属于当前慢轴振动周期的预设有效行扫描阶段的情况下,确定当前时刻所在的目标系统时钟周期在所述目标快轴振动周期内的第二次序计数值;
8、判断所述第二次序计数值是否与所述目标快轴振动周期对应的预设快轴扫描表中记录的任一系统时钟周期次序计数值匹配,并在判定所述第二次序计数值与任一系统时钟周期次序计数值成功匹配时,驱动所述激光器经所述mems振镜发射激光,其中所述预设快轴扫描表记录有对应快轴振动周期内的多个等角度间隔分布的快轴角度值各自对应的系统时钟周期次序计数值。
9、第二方面,本技术提供一种雷达扫描控制装置,应用于激光雷达系统所包括的主控芯片,所述激光雷达系统还包括mems振镜和激光器,其中所述主控芯片与所述mems振镜电性连接,用于驱动所述mems振镜在快轴方向按照正弦波驱动信号做简谐振动,并驱动所述mems振镜在慢轴方向按照锯齿波驱动信号做线性往复运动;所述主控芯片与所述激光器电性连接,用于驱动所述激光器经所述mems振镜发射激光;所述装置包括:
10、振镜电压获取模块,用于获取所述mems振镜在当前时刻反馈的目标慢轴角度等效电压信息及目标快轴角度等效电压信息;
11、快轴计数确定模块,用于根据所述目标快轴角度等效电压信息及所述目标慢轴角度等效电压信息,确定当前时刻所在的目标快轴振动周期在当前慢轴运动周期内的第一次序计数值;
12、有效扫描检测模块,用于检测所述第一次序计数值是否属于当前慢轴运动周期的预设有效行扫描阶段;
13、时钟计数确定模块,用于在检测到所述第一次序计数值属于当前慢轴振动周期的预设有效行扫描阶段的情况下,确定当前时刻所在的目标系统时钟周期在所述目标快轴振动周期内的第二次序计数值;
14、激光发射控制模块,用于判断所述第二次序计数值是否与所述目标快轴振动周期对应的预设快轴扫描表中记录的任一系统时钟周期次序计数值匹配,并在判定所述第二次序计数值与任一系统时钟周期次序计数值成功匹配时,驱动所述激光器经所述mems振镜发射激光,其中所述预设快轴扫描表记录有对应快轴振动周期内的多个等角度间隔分布的快轴角度值各自对应的系统时钟周期次序计数值。
15、第三方面,本技术提供一种激光雷达系统,所述系统包括主控芯片、mems振镜和激光器;
16、所述主控芯片与所述mems振镜电性连接,用于驱动所述mems振镜在快轴方向按照正弦波驱动信号做简谐振动,并驱动所述mems振镜在慢轴方向按照锯齿波驱动信号做线性往复运动;
17、所述主控芯片与所述激光器电性连接,用于驱动所述激光器经所述mems振镜发射激光;
18、所述主控芯片存储有计算机程序,并可通过执行所述计算机程序,以实现前述实施方式中任意一项所述的雷达扫描控制方法。
19、在可选的实施方式中,所述系统还包括模数转换芯片及数模转换芯片;
20、所述数模转换芯片设置在所述主控芯片与所述mems振镜之间,用于将所述主控芯片向所述mems振镜输出的正弦波驱动信号及锯齿波驱动信号进行数模转换处理,并将经数模转换处理后的正弦波驱动信号及锯齿波驱动信号传输给所述mems振镜;
21、所述模数转换芯片设置在所述主控芯片与所述mems振镜之间,用于将所述mems振镜反馈的慢轴角度等效电压信息和快轴角度等效电压信息进行模数转换处理,并将经模数转换处理后的慢轴角度等效电压信息和快轴角度等效电压信息传输给所述主控芯片。
22、第四方面,本技术提供一种可读存储介质,其上存储有计算机程序,所述计算机程序被激光雷达系统所包括的主控芯片执行时,实现前述实施方式中任意一项所述的雷达扫描控制方法,其中所述激光雷达系统还包括mems振镜和激光器;
23、所述主控芯片与所述mems振镜电性连接,用于驱动所述mems振镜在快轴方向按照正弦波驱动信号做简谐振动,并驱动所述mems振镜在慢轴方向按照锯齿波驱动信号做线性往复运动;
24、所述主控芯片与所述激光器电性连接,用于驱动所述激光器经所述mems振镜发射激光。
25、在此情况下,本技术实施例的有益效果可以包括以下内容:
26、本技术基于mems振镜在当前时刻的目标快轴角度等效电压信息和目标慢轴角度等效电压信息,确定当前时刻所在的目标快轴振动周期在当前慢轴运动周期内的第一次序计数值,并在第一次序计数值属于当前慢轴振动周期的预设有效行扫描阶段时,确定当前时刻所在的目标系统时钟周期在目标快轴振动周期内的第二次序计数值,而后在第二次序计数值对应匹配目标快轴振动周期的预设快轴扫描表所记录的多个等角度间隔的分布快轴角度值各自对应的系统时钟周期次序计数值中的任一系统时钟周期次序计数值时,驱动激光器经mems振镜发射激光,从而在单个慢轴运动周期中的涉及有效行扫描阶段的每个快轴振动周期内,按照特定快轴角度间隔地发射激光,以实现振镜快轴振动控制操作和激光发射动作之间的精准同步控制效果,并实现快轴视场角范围内的激光均匀打点扫描效果,确保对应激光雷达系统能够实现期望雷达分辨率和期望扫描点云效果。
27、为使本技术的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
- 还没有人留言评论。精彩留言会获得点赞!