一种目标物的轮廓信息确定方法、装置、设备及介质与流程
本技术实施例涉及自动驾驶领域,尤其涉及一种目标物的轮廓信息确定方法、装置、设备及介质。
背景技术:
1、事件相机(event-based camera,ec)是一种新型传感器,包括动态视觉传感器(dynamic vision sensor,dvs)以及动态和有源像素视觉传感器(dynamic and active-pixel vision sensor,davis)等。不同于传统相机拍摄一幅完整的图像,事件相机输出的是像素亮度的变化情况,即事件。
2、目前,在使用差分型事件相机获取目标物图像过程中,当目标物与事件相机处于相对静止的状态时,事件相机存在无法获得目标物轮廓信息的问题。比如在自动驾驶场景下,由于目标物(车辆)可能存在与事件相机相对静止的情况,导致事件相机无法确定目标物的轮廓信息,进而可导致事件相机所属车辆在行驶中存在安全隐患。
技术实现思路
1、本技术实施例提供一种目标物的轮廓信息确定方法、装置、设备及介质,用以在目标物与事件相机处于相对静止的情况下,使事件相机更准确地确定目标物的轮廓信息。
2、第一方面,本技术实施例提供一种目标物的轮廓信息确定方法,包括:
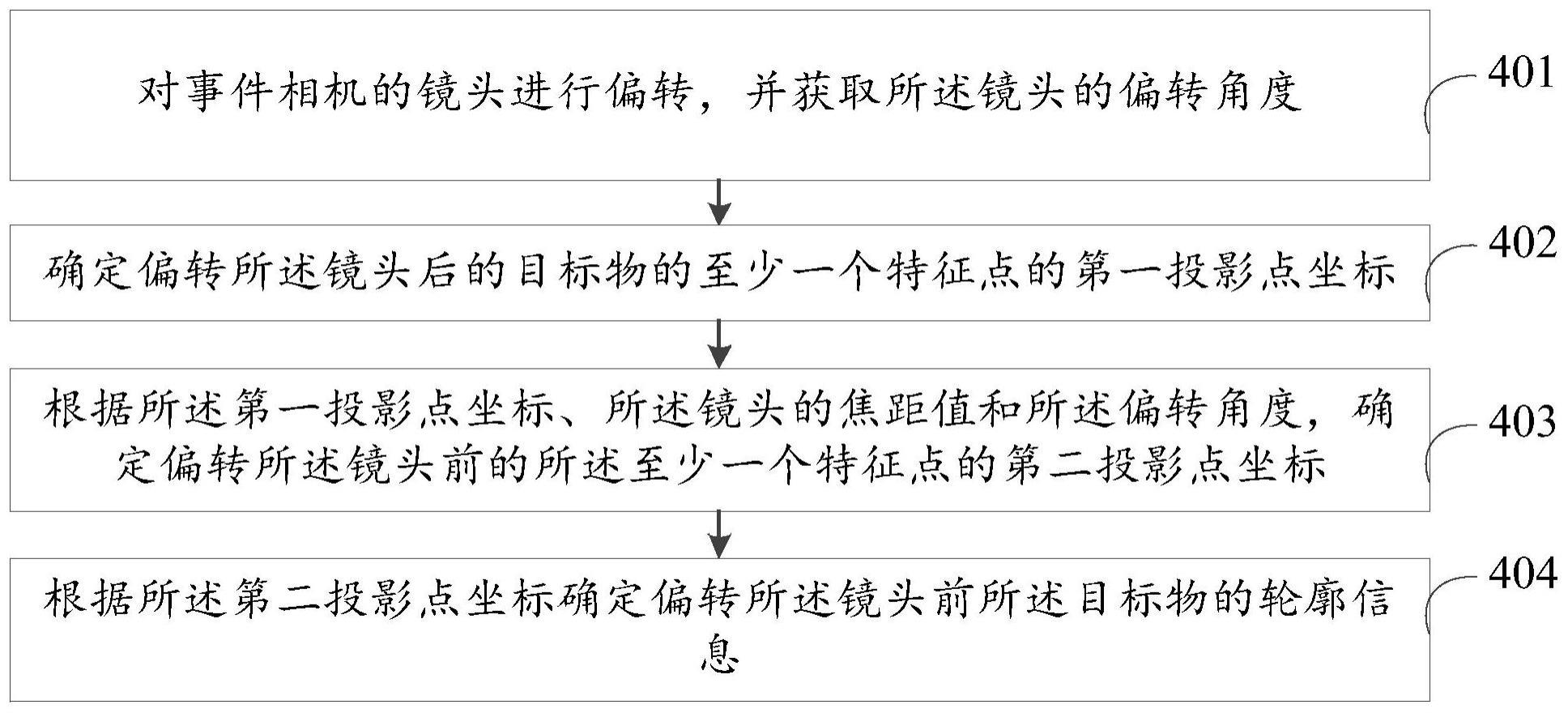
3、对事件相机的镜头进行偏转,并获取所述镜头的偏转角度;
4、确定偏转所述镜头后的目标物的至少一个特征点的第一投影点坐标;
5、根据所述第一投影点坐标、所述镜头的焦距值和所述偏转角度,确定偏转所述镜头前的所述至少一个特征点的第二投影点坐标;
6、根据所述第二投影点坐标确定偏转所述镜头前所述目标物的轮廓信息。
7、本技术实施例中,在事件相机与目标物处于相对静止状态时,通过对事件相机的镜头进行偏转,改变目标物与事件相机之间的相对静止状态,使得事件相机可检测到偏转镜头后的目标物的至少一个特征点的第一投影点坐标。并且,本技术基于第一投影点坐标、镜头的焦距值和镜头的偏转角度,确定偏转所述镜头前的所述至少一个特征点的第二投影点坐标,根据所述第二投影点坐标确定偏转所述镜头前所述目标物的轮廓信息,从而使事件相机更准确地确定目标物的轮廓信息。
8、在一种可能的设计中,所述对事件相机的镜头进行偏转,包括:
9、按照设定角度对所述事件相机的镜头进行偏转;或者,
10、按照设定的时长对所述事件相机的镜头进行偏转;
11、以检测到所述事件相机与所述目标物处于非相对静止状态为结束条件,对所述事件相机的镜头进行偏转。
12、本技术实施例中,能够在事件相机与目标物处于相对静止状态时,按照设定角度或者设定的时长,以检测到事件相机与目标物处于非相对静止状态为结束条件,对事件相机的镜头进行偏转,从而改变目标物与事件相机之间的相对静止状态,使得事件相机能够确定目标物的轮廓信息,从而使事件相机更准确地确定目标物的轮廓信息。
13、在一种可能的设计中,所述确定偏转所述镜头后的目标物的至少一个特征点的第一投影点坐标,包括:
14、获取偏转所述镜头后的事件相机对所述目标物进行拍摄得到的事件;
15、基于所述事件,确定所述目标物的至少一个特征点的第一投影点坐标。
16、本技术实施例中,通过获取偏转所述镜头后的事件相机对所述目标物进行拍摄得到的事件,并基于所述事件,确定所述目标物的至少一个特征点的第一投影点坐标,从而提高确定的目标物的特征点的第一投影点坐标的准确度。
17、在一种可能的设计中,所述根据第二投影点坐标确定偏转所述镜头前所述目标物的轮廓信息,包括:
18、根据所述目标物的多个特征点对应的第二投影点坐标,确定所述目标物的轮廓信息。
19、本技术实施例中,根据目标物的多个特征点对应的第二投影点坐标确定目标物的轮廓信息,可提高确定的目标物的轮廓信息的准确度。
20、在一种可能的设计中,所述偏转角度包括俯仰角度,所述根据所述第一投影点坐标、所述镜头的焦距值和所述偏转角度的变化值,确定偏转所述镜头前的所述特征点的第二投影点坐标,包括:
21、将所述第一投影点坐标中的横坐标作为所述第二投影点坐标中的横坐标;
22、基于所述第一投影点坐标中的纵坐标、所述镜头的焦距值和所述俯仰角度,确定所述第二投影点坐标中的纵坐标。
23、本技术实施例中,当偏转角度包括俯仰角度时,基于目标物的特征点的第一投影点坐标、镜头的焦距值和俯仰角度,确定偏转镜头前的目标物的特征点的第二投影点坐标,从而使确定的特征点的第二投影点坐标更准确,进而使事件相机更准确地确定目标物的轮廓信息。
24、在一种可能的设计中,所述偏转角度包括偏航角度,所述根据所述第一投影点坐标、所述镜头的焦距值和所述偏转角度的变化值,确定偏转所述镜头前的所述特征点的第二投影点坐标,包括:
25、基于所述第一投影点坐标中的横坐标、所述镜头的焦距值和所述偏航角度,确定所述第二投影点坐标中的横坐标;
26、将所述第一投影点坐标中的纵坐标作为所述第二投影点坐标中的纵坐标。
27、本技术实施例中,当偏转角度包括偏航角度时,基于目标物的特征点的第一投影点坐标、镜头的焦距值和偏航角度,确定偏转镜头前的目标物的特征点的第二投影点坐标,从而使确定的特征点的第二投影点坐标更准确,进而使事件相机更准确地确定目标物的轮廓信息。
28、在一种可能的设计中,所述偏转角度包括俯仰角度和偏航角度,所述根据所述第一投影点坐标、所述镜头的焦距值和所述偏转角度的变化值,确定偏转所述镜头前的所述特征点的第二投影点坐标,包括:
29、基于所述第一投影点坐标中的横坐标、所述镜头的焦距值和所述偏航角度,确定所述第二投影点坐标中的横坐标;
30、基于所述第一投影点坐标中的纵坐标、所述镜头的焦距值和所述俯仰角度,确定所述第二投影点坐标中的纵坐标。
31、本技术实施例中,当偏转角度包括俯仰角度和偏航角度时,基于目标物的特征点的第一投影点坐标、镜头的焦距值、俯仰角度和偏航角度,确定偏转镜头前的目标物的特征点的第二投影点坐标,从而使确定的特征点的第二投影点坐标更准确,进而使事件相机更准确地确定目标物的轮廓信息。
32、第二方面,本技术实施例提供一种目标物的轮廓信息确定装置,包括:。
33、偏转模块,用于对事件相机的镜头进行偏转,并获取所述镜头的偏转角度;
34、第一确定模块,用于确定偏转所述镜头后的目标物的至少一个特征点的第一投影点坐标;
35、第二确定模块,用于根据所述第一投影点坐标、所述镜头的焦距值和所述偏转角度,确定偏转所述镜头前的所述至少一个特征点的第二投影点坐标;
36、第三确定模块,用于根据所述第二投影点坐标确定偏转所述镜头前所述目标物的轮廓信息。
37、在一种可能的设计中,所述偏转模块用于:
38、按照设定角度对所述事件相机的镜头进行偏转;或者,
39、按照设定的时长对所述事件相机的镜头进行偏转;
40、以检测到所述事件相机与所述目标物处于非相对静止状态为结束条件,对所述事件相机的镜头进行偏转。
41、在一种可能的设计中,所述第一确定模块还用于:
42、获取偏转所述镜头后的事件相机对所述目标物进行拍摄得到的事件;
43、基于所述事件,确定所述目标物的至少一个特征点的第一投影点坐标。
44、在一种可能的设计中,所述第三确定模块用于:
45、根据所述目标物的多个特征点对应的第二投影点坐标,确定所述目标物的轮廓信息。
46、在一种可能的设计中,所述偏转角度包括俯仰角度,所述第二确定模块用于:
47、将所述第一投影点坐标中的横坐标作为所述第二投影点坐标中的横坐标;
48、基于所述第一投影点坐标中的纵坐标、所述镜头的焦距值和所述俯仰角度,确定所述第二投影点坐标中的纵坐标。
49、在一种可能的设计中,所述偏转角度包括偏航角度,所述第二确定模块用于:
50、基于所述第一投影点坐标中的横坐标、所述镜头的焦距值和所述偏航角度,确定所述第二投影点坐标中的横坐标;
51、将所述第一投影点坐标中的纵坐标作为所述第二投影点坐标中的纵坐标。
52、在一种可能的设计中,所述偏转角度包括俯仰角度和偏航角度,所述第二确定模块用于:
53、基于所述第一投影点坐标中的横坐标、所述镜头的焦距值和所述偏航角度,确定所述第二投影点坐标中的横坐标;
54、基于所述第一投影点坐标中的纵坐标、所述镜头的焦距值和所述俯仰角度,确定所述第二投影点坐标中的纵坐标。
55、第三方面,本技术实施例提供一种电子设备,包括:
56、存储器,用于存储程序指令;
57、处理器,用于调用所述存储器中存储的程序指令,按照获得的程序指令执行第一方面及其任意一种设计的方法包括的步骤。
58、第四方面,本技术实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序包括程序指令,所述程序指令当被计算机执行时,使所述计算机执行第一方面及其任意一种设计的方法。
59、第二方面至第四方面及其任意一种设计所带来的技术效果可参见第一方面中对应的设计所带来的技术效果,此处不再赘述。
- 还没有人留言评论。精彩留言会获得点赞!