智能陀螺仪的动量轮转速调节杆平衡性控制系统及方法
本发明涉及陀螺仪平衡控制,具体地涉及智能陀螺仪的动量轮转速调节杆平衡性控制系统及方法。
背景技术:
1、杆的平衡性源于一个基本的物理问题,即:杆如何保持平衡。平衡需要考虑杆质量、形状和支撑力等一系列的物理因素。具体来说,一个简单的杆保持平衡的条件就是,其重心位于支持力的正上方,且支撑力的大小等于重力的大小,也就是说,在水平方向上各个方向的力相等,这样杆就保持在一个稳定且平衡的状态。
2、传统的系统利用了一种经典的反馈控制算法,它由比例(p)、积分(i)和微分(d)三个组成部分组成,以下简称pid,用于控制系统的稳定性和响应速度。杆的pid控制可以对杆子的平衡进行快速、准确、稳定的控制。通过实时测量杆子的偏离角度与目标角度的差距(误差),根据比例、积分、微分三个控制器的输出来调整杆子的位置,最终使其保持在垂直状态。
3、具体地,比例控制器会根据实时误差大小,产生一个与误差成比例的控制信号;积分控制器则会累计误差,产生一个随时间累积的控制信号;微分控制器则会根据误差变化率,产生一个随时间变化的控制信号。这三个控制器的输出信号经过加权计算后,作为杆子的控制输入量,使得杆子能够快速且稳定地回到垂直状态。
4、例如,当杆子向右侧倾斜时,比例控制器会产生一个向左的控制信号,用于抵消杆子的倾斜角度;积分控制器则会产生一个随时间逐渐增加的控制信号,用于消除杆子的持续误差;微分控制器则会根据杆子倾斜角度的变化率产生一个控制信号,用于更快地调整杆子的位置。
5、而部分传统系统利用了非线性控制,杆的非线性控制是一种针对非线性系统的控制方法,它可以有效地解决杆子平衡控制问题。与传统的线性控制方法不同,非线性控制方法不仅考虑系统的局部特性,还要兼顾整个系统的全局动态特性,从而在更广泛的场景下实现杆的平衡控制。
6、针对杆子的非线性控制,首先需要建立杆子的动态模型,并根据模型的特点选择适当的控制策略。以双摆杆为例,杆的运动状态可以用两个自由度的角度来描述,因此可以利用状态空间法建立杆子的动态方程。根据状态空间模型建立的系统动态方程,可以应用不同的非线性控制算法来实现杆子的平衡控制。
7、一种常见的非线性控制方法是基于反馈线性化技术的控制方法。该方法将非线性系统通过反馈线性化技术转化为一个线性系统,然后应用线性控制方法进行设计和优化。具体地,可以根据杆子的动态特点,选择适当的反馈线性化函数,如反正切函数、双曲正切函数等,将杆子的非线性项进行抵消,使得系统的动态方程近似为一个线性系统,然后应用经典的线性控制方法,在这个线性系统基础上设计控制器。
8、此外,还有一些其他的非线性控制方法,如自适应控制、滑模控制、神经网络控制等,这些方法都可以有效地应对杆的非线性特性,实现杆子的快速稳定控制。但需要注意的是,非线性控制算法的参数调整和优化比较困难,需要针对具体问题进行深入研究和实验验证。
9、综上所述,本发明通过结合传统控制方法和先进的智能算法,提供了一种更高效、精确、稳定的杆平衡动态控制系统。该系统可以广泛应用于工业自动化、机器人技术等领域,具有重要的实际应用价值。
10、现有技术的缺陷在于:
11、1.高度模块化,增加了系统的适用性和可用性,避免了一部分损坏就得整体替换导致的资源浪费,且为后续系统的更新迭代留下了接口,可根据使用者的想法进行模块的选用。
12、2.传统的系统都较为复杂,大部分不具有便携性,本系统小巧、轻便、实用性强,可做到“即拆即走”,不占用较大的占地面积。
13、3.传统的平衡性系统所平衡的杆都是固定的,杆的物理参数是不可改变的,本系统可以根据杆的质量、大小等更换不同型号的配件,以实现对杆的动态平衡调节。
14、4.传统平衡性系统的控制方法一般采用经典的pid控制方法,这种方法对于复杂、非线性系统的动态响应能力有限。而本专利中引入了非线性控制方法,可以更好地应对杆子的非线性特性,提高平衡性的控制精度和稳定性。
15、5.传统系统在面对局部和全局动态特性时,缺乏对不同特性的考虑和适应能力。而本系统可以根据杆子的动态特性建立相应的模型,并选择适当的控制方法,从而实现对局部和全局动态特性的优化。
16、6.传统平衡性调节系统很少采用智能化控制,无法根据环境变化和需求调整自身的控制参数。本系统采用了智能算法,可以根据实时的测量数据和环境条件进行自适应调节,提高了控制的灵活性和适应性。
技术实现思路
1、本发明针对上述问题,提供智能陀螺仪的动量轮转速调节杆平衡性控制系统及方法,其目的在于通过线性反馈来实时并且智能的处理获取数据,使系统自动对不同环境进行参数调节;降低维修成本,提高系统的可携带性和适用性实现快速配置和灵活性的使用;具备更高的适应性和可靠性,能够在各种复杂环境下正常运行;在不同环境中快速适应并提供稳定的性能;大大减轻的操作负担,并提高系统的性能稳定性和可靠性;使得用户能够轻松上手并且便捷地操作系统。
2、为解决上述问题,本发明提供的技术方案为:
3、一种智能惯性测量单元的动量轮转速调节杆平衡性控制系统,其特征在于:包含惯性测量单元、磁编码器、动量轮、主控板,其中:
4、所述惯性测量单元包含x轴、y轴、z轴,用于将自身测得的角度数据传输到所述主控板,并根据预先设定好的条件对3个所述无刷电机进行不同的脉冲脉宽调制分配,实现对所述无刷电机的速度的增加或者抑制作用;
5、所述磁编码器用于对无刷电机进行计数,将数据传输到所述主控板,以实现对所述无刷电机的速度控制;
6、所述动量轮用于通过自身的质量决定本控制系统所能控制的杆的大小,以及质量的最大值,通过调节转速来实现对杆的动态平衡控制;
7、所述主控板用于实时处理来自所述惯性测量单元和所述磁编码器的数据,进行快速响应,并作出调节。
8、优选地,所述主控板采用esp32芯片;所述惯性测量单元采用陀螺仪;所述磁编码器采用as5600磁编码器。
9、优选地,所述陀螺仪采用mpu6050陀螺仪;
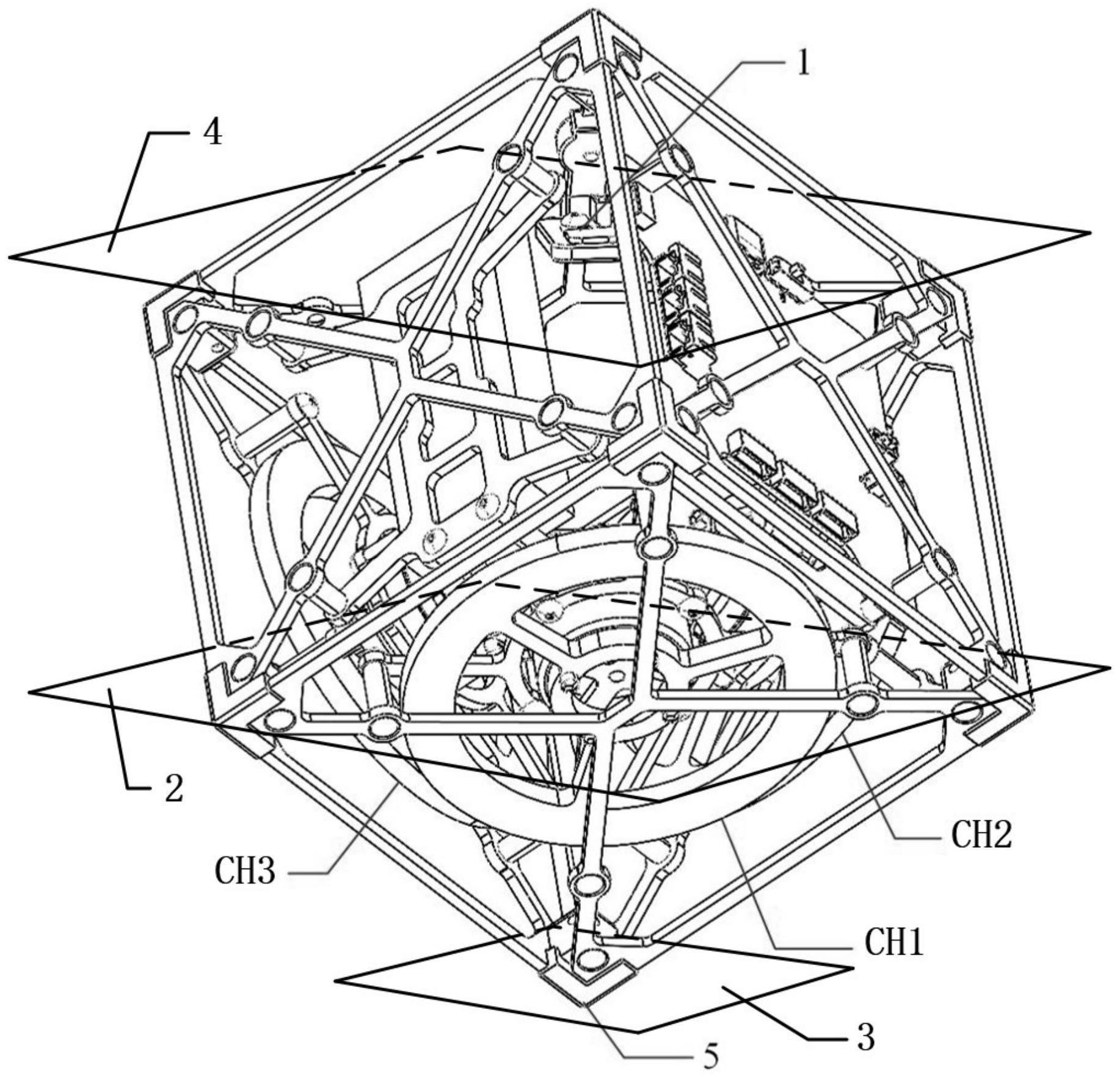
10、所述动量轮有3个,根据立方体的下顶点对称,分别为第一动量轮、第二动量轮、第三动量轮;所述第一动量轮、所述第二动量轮、所述第三动量轮组成的平面i与底面ii平行。
11、优选地,所述陀螺仪的x轴与y轴组成的平面iii与所述底面ii平行;
12、所述陀螺仪的x轴、y轴、z轴的交点投影到所述底面ii上与支点重合;
13、立方体的经过所述支点的边分别与所述底面ii的夹角为35.3°;
14、所述第一动量轮的中点、所述第二动量轮的中点、所述第三动量轮的中点投影到所述底面ii上,并分别与所述支点形成线段,相互之间的夹角都为120°。
15、优选地,所述陀螺仪的y轴投影到所述底面ii上,并经过所述支点;
16、所述第一动量轮的转动速度方向,与所述第一动量轮的中点投影到所述底面ii上并与所述支点形成线段垂直;
17、所述第二动量轮的转动速度方向,与所述第二动量轮的中点投影到所述底面ii上并与所述支点形成线段垂直;
18、所述第三动量轮的转动速度方向,与所述第三动量轮的中点投影到所述底面ii上并与所述支点形成线段垂直。
19、优选地,立方体的角度按下式表达:
20、θ=anglex-anglee
21、其中:θ为所述立方体的角度;anglex为所述陀螺仪沿x轴方向测量得到的角度值;anglee为所述动量轮的旋转轴与平衡边在同一平面上测得的角度值;
22、立方体的角速度按下式表达:
23、θ'=gyrox
24、其中:θ'为所述立方体的角速度;gyrox为通过所述陀螺仪沿x轴方向得到的角速度;
25、优选地,所述动量轮的角速度按下式表达:
26、w'=motorspeedx
27、其中:w'为所述动量轮的角速度;motorspeedx为所述动量轮的转速;
28、所述第一动量轮的转动速度、所述第二动量轮的转动速度、所述第三动量轮的转动速度之间的关系按下式表达:
29、
30、其中:sx、sy、sz都为中间变量;
31、sch1为所述第一动量轮的转动速度,按下式表达:
32、
33、sch2为所述第二动量轮的转动速度,按下式表达:
34、
35、sch3为所述第三动量轮的转动速度,按下式表达:
36、
37、其中:lx、ly、lz都为中间变量,按下式表达:
38、
39、其中:gyroy为通过所述陀螺仪沿y轴方向得到的角速度;gyroz为通过所述陀螺仪沿z轴方向得到的角速度;angley为所述陀螺仪沿y轴方向测量得到的角度值;anglez为所述陀螺仪沿z轴方向测量得到的角度值;anglexe为x轴预设的期望角度值;angleye为y轴预设的期望角度值;angleze为z轴预设的期望角度值;kxp为对lx的角度误差影响修正系数;kxv对lx的角速度影响修正系数;kyp为对ly的角度误差影响修正系数;kyv为对ly的角速度影响修正系数;kzp为对lz的角度误差影响修正系数;kzv为对lz的角速度影响修正系数;kxs、kys、kzs都为自定义参数。
40、一种利用了智能陀螺仪的动量轮转速调节杆平衡性控制系统的智能陀螺仪的动量轮转速调节杆平衡性控制方法,包含以下步骤:
41、s100.系统初始化,系统自检,检查指示灯是否常亮;然后根据自检结果和检查结果,做出如下操作:
42、如果自检成功,且所述指示灯常亮,则执行s200;
43、如果自检不成功,或所述指示灯没有常亮,则返回并再次执行s100;
44、s200.从所述陀螺仪读取角速度、角度;然后根据角速度、角度计算得到本系统的姿态信息和角度信息;然后检查所述陀螺仪是否在人工预设的最大误差之内;然后根据检查结果,做出如下操作:
45、如果所述陀螺仪在所述最大误差之内,则执行s300;
46、如果所述陀螺仪不在所述最大误差之内,则返回并再次执行s100;
47、s300.所述动量轮转动;所述指示灯闪烁;开始执行预定程序,以使整个系统都在不受外界条件影响的情况下保持动态平衡。
48、优选地,s100中的系统初始化包含系统时钟初始化、串口初始化、陀螺仪初始化、定时器初始化。
49、优选地,当s300执行时,还同时执行系统保护流程和系统调试及优化流程;
50、其中:
51、所述系统保护流程包含过流保护、过压保护、过温保护;
52、所述系统调试及优化流程包含参数调整、算法优化、校准调整。
53、本发明与现有技术对比,具有以下优点:
54、1.本发明通过线性反馈来实时并且智能的处理获取数据,使系统自动对不同环境进行参数调节。
55、2.本发明通过将系统划分为多个独立的模块,即使其中一个模块出现损坏或故障,也只需更换该模块而无需整体更换系统。这不仅降低了维修成本,同时也提高了系统的可携带性和适用性。用户可以根据需要轻松添加或删除模块,实现快速配置和灵活性的使用。
56、3.本发明还配备了先进的自适应算法,能够根据不同环境和输入数据的变化实时地优化参数调节。这种智能的反馈系统使得系统具备了更高的适应性和可靠性,能够在各种复杂环境下正常运行。
57、4.本发明还采用了先进的算法,以提高技术效果。通过深度学习和数据挖掘等技术,本发明能够更准确地分析和预测数据,从而实现更精确的参数调节和优化。这种高效的算法使得系统可以在不同环境中快速适应并提供稳定的性能。
58、5.本发明还具有高度智能化的特点。利用人工智能技术,我们能够实现系统的自主学习和自主决策能力。系统可以根据外部环境和输入数据的变化,自动调整和优化自身的参数设置,以达到更好的工作效果。这种智能化的特点大大减轻了的操作负担,并提高了系统的性能稳定性和可靠性。
59、6.本发明还注重用户体验的提升。本发明在设计过程中考虑了用户的需求和使用习惯,使得系统的操作界面友好简洁,功能布局合理,使得用户能够轻松上手并且便捷地操作系统。同时,本发明还提供了详细的使用说明和技术支持,以便用户在使用过程中遇到问题能够及时解决。
- 还没有人留言评论。精彩留言会获得点赞!