一种基于镜像式立体靶标的视觉系统定位方法
本发明属于视觉测量,具体涉及一种基于镜像式立体靶标的视觉系统定位方法。
背景技术:
1、视觉测量技术将摄像机采集到的清晰图像作为信息载体,借助计算机强大的数据处理能力,具有非接触、高精度、自动化测量的能力,在工业检测中获得了广泛的应用。单个光学三维传感器受视场空间限制,测量范围有限,单次测量只能获得被测物表面的局部三维信息。为了获取被测物的完整三维信息,通常需要多次移动光学三维传感器完成多角度测量。光学三维传感器可实现在其测量坐标系的独立测量,但不同位置获取的测量数据不具有统一性。为了统一局部测量坐标系下的数据,需要建立全局坐标系,对光学三维传感器进行定位。
2、目前常见的几种方法有:一、将激光跟踪仪与视觉测量系统结合,将激光跟踪仪自身坐标系作为全局坐标系,通过解算光学三维传感器的位姿,完成多视点测量数据的统一。该方法坐标转换环节较少,测量精度高,但是成本高,操作复杂。二、在被测物表面粘贴一定数量的标记点,将光学三维传感器在首个位置的测量坐标系作为全局坐标系,通过特征点识别及特征点匹配,完成局部测量坐标系下三维数据的拼接。该方法简单易操作,但标志点粘贴位置限制较多,存在累加误差大、数据缺失等问题。三、平面靶标具有制作简单、精度高、易保存的优点。在视觉系统的全局标定中需要拍摄多个不同姿态的靶标,由于平面靶标存在遮挡等问题,往往需要通过组合多个平面靶标构建立体靶标,但是常见的立体靶标存在结构复杂、加工困难、良品率低、不易保存、成本高等问题。因此需要设计一种新型的立体靶标,在实现视觉系统精确定位的前提下,尽可能的降低加工成本。
技术实现思路
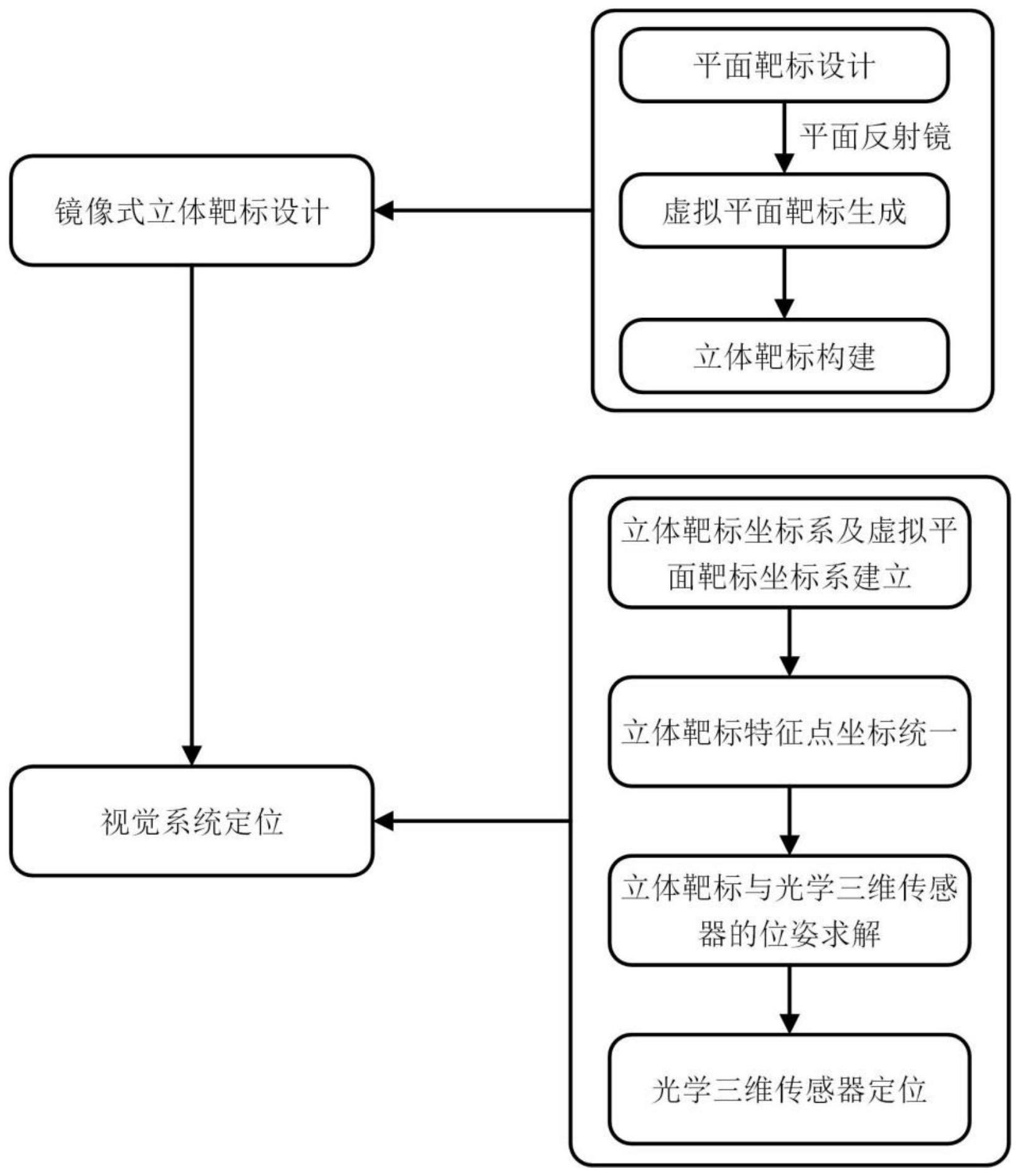
1、针对传统立体靶标结构复杂、加工困难、良品率低、不易保存、成本高等问题,本发明提出一种基于镜像式立体靶标的视觉系统定位方法,其中的镜像式立体靶标由平面靶标与平面反射镜连接构成,无需复杂的机械加工,结合计算机视觉和图像处理技术,将镜像式立体靶标固定在光学三维传感器上,通过立体靶标特征点坐标统一、立体靶标与光学三维传感器的位姿求解、光学三维传感器定位,将光学三维传感器在不同位置获取的三维点云转换至全局坐标系下,实现多视点测量数据的全局统一,可用于物体的完整性测量。
2、为达到上述目的,本发明采用如下技术方案:
3、一种基于镜像式立体靶标的视觉系统定位方法,包括以下步骤:
4、s1:设计镜像式立体靶标,该镜像式立体靶标由一个平面靶标及一个平面反射镜组成,平面靶标上存在四个不同的特征图案;
5、s2:分别建立立体靶标坐标系、虚拟平面靶标坐标系,确定各坐标系原点位置及坐标轴方向;
6、s3:解算虚拟平面靶标与平面靶标的相对位姿,得到镜像式立体靶标上每个特征点在立体靶标坐标系下的坐标;
7、s4:将镜像式立体靶标固定在光学三维传感器上,解算光学三维传感器与镜像式立体靶标的相对位姿;
8、s5:将一个事先标定好的摄像机固定在实验平台的上方,建立全局坐标系,自由移动光学三维传感器,使用摄像机拍摄镜像式立体靶标,摄像机视场中至少存在两个特征图案,利用摄像机采集到的立体靶标图像对光学三维传感器进行定位,将光学三维传感器在不同位置获取的三维数据进行全局统一。
9、进一步的,所述s1中,设计镜像式立体靶标具体为:
10、s101:使得平面靶标由陶瓷材料制成,平面靶标上的四个特征图案为具有编码特征的圆形图案,分别为一个圆、两个同心圆、三个同心圆、四个同心圆,平面靶标上的特征点为四个圆形图案的圆心及相邻圆形图案的公切点;
11、s102:将平面反射镜设置为镀铝前向镜;
12、s103:平面靶标经平面反射镜反射形成虚拟平面靶标,平面靶标与虚拟平面靶标关于平面反射镜对称,两个靶标上对应特征点的连线与平面反射镜垂直,对应特征点到平面反射镜的距离相等。
13、进一步的,所述s2包括:
14、s201:基于平面靶标建立立体靶标坐标系ost-xstystzst,原点ost为平面靶标上三个同心圆图案的圆心,xst轴指向平面靶标上四个同心圆图案的圆心,yst轴指向平面靶标上两个同心圆图案的圆心,zst轴垂直于靶标平面,zst轴的正轴方向是根据右手定则确定的。
15、s202:基于虚拟平面靶标建立虚拟平面靶标坐标系ostv-xstvystvzstv,原点ostv为虚拟平面靶标上三个同心圆图案的圆心,xstv轴指向虚拟平面靶标上四个同心圆图案的圆心,ystv轴指向虚拟平面靶标上两个同心圆图案的圆心,zstv轴垂直于虚拟靶标平面,zstv轴的正轴方向是根据右手定则确定的。
16、进一步的,所述s3包括:
17、s301:将镜像式立体靶标放置于事先标定好的摄像机视场范围内,由摄像机采集一幅清晰的立体靶标图像;
18、s302:建立摄像机坐标系oc-xcyczc,原点oc为摄像机光学中心,xc轴平行于图像水平方向向右,yc轴平行于图像竖直方向向下,zc轴为光轴方向,摄像机坐标系符合右手定则;
19、s303:利用平面靶标上特征点在图像中的坐标以及在立体靶标坐标系中的坐标,解算ost-xstystzst坐标系至oc-xcyczc坐标系的旋转矩阵和平移向量
20、s304:建立虚拟摄像机坐标系ov-xvyvzv,虚拟摄像机坐标系与摄像机坐标系关于平面反射镜对称,虚拟摄像机坐标系符合左手定则;
21、s305:建立符合右手定则的虚拟摄像机坐标系ovr-xvryvrzvr,原点ovr、yvr轴、zvr轴与虚拟摄像机坐标系中的原点ov、yv轴、zv轴一致,xvr轴方向与xv轴方向相反;
22、s306:将图像水平翻转,利用虚拟平面靶标上特征点在翻转后图像中的坐标,解算ost-xstystzst坐标系至ovr-xvryvrzvr坐标系的旋转矩阵和平移向量
23、s307:根据平面靶标与虚拟摄像机的相对位姿和虚拟平面靶标与摄像机的相对位姿相同,ostv-xstvystvzstv坐标系至oc-xcyczc坐标系的旋转矩阵和平移向量与和相同;
24、s308:根据公式(1)解算ostv-xstvystvzstv坐标系至ost-xstystzst坐标系的旋转矩阵和平移向量
25、
26、解算虚拟平面靶标上的特征点在立体靶标坐标系下的坐标。
27、进一步的,所述s4包括:
28、s401:利用一个圆点阵列平面靶标和一个事先标定好的摄像机,通过调整光学三维传感器与圆点阵列平面靶标的位置,使圆点阵列平面靶标位于光学三维传感器及摄像机的视场范围内,使镜像式立体靶标上的至少两个特征图案位于摄像机视场范围内,光学三维传感器与摄像机分别采集一幅清晰图像;
29、s402:建立圆点阵列平面靶标坐标系ot-xtytzt,原点ot为圆点阵列平面靶标上左上角特征点中心,xt轴、yt轴分别指向圆点阵列平面靶标的水平和竖直方向,zt轴垂直于圆点阵列靶标平面,圆点阵列平面靶标坐标系符合右手定则;
30、s403:建立光学三维传感器坐标系os-xsyszs,原点os为光学三维传感器中摄像机的光心,xs轴平行于图像水平方向向右,ys轴平行于图像竖直方向向下,zs轴为光轴方向,光学三维传感器坐标系符合右手定则;
31、s404:利用圆点阵列平面靶标上特征点在光学三维传感器采集图像中的坐标,解算ot-xtytzt坐标系至os-xsyszs坐标系的旋转矩阵和平移向量
32、s405:利用圆点阵列平面靶标上特征点在摄像机采集图像中的坐标,解算ot-xtytzt坐标系至oc-xcyczc坐标系的旋转矩阵和平移向量
33、s406:利用镜像式立体靶标上特征点在摄像机采集图像中的坐标,解算ost-xstystzst坐标系至oc-xcyczc坐标系的旋转矩阵和平移向量
34、s407:由公式(2):
35、
36、解算ost-xstystzst坐标系至os-xsyszs坐标系的旋转矩阵和平移向量
37、进一步的,所述s5包括:
38、s501:建立全局坐标系og-xgygzg,原点og为摄像机光心,xg轴平行于图像水平方向向右,yg轴平行于图像竖直方向向下,zg轴为光轴方向,全局坐标系符合右手定则;
39、s502:利用镜像式立体靶标上特征点在摄像机采集图像中的坐标,解算ost-xstystzst坐标系至og-xgygzg坐标系的旋转矩阵和平移向量
40、s503:根据镜像式立体靶标与光学三维传感器的相对位姿,由公式(3):
41、
42、解算os-xsyszs坐标系至og-xgygzg坐标系的旋转矩阵和平移向量实现视觉系统的定位,并将光学三维传感器在不同位置获取的三维数据进行全局统一。
43、本发明的有益效果是:
44、(1)本发明设计了一种新型立体靶标,由平面靶标与平面反射镜连接构成,利用平面镜反射成像原理,可以将单个平面靶标扩展为立体靶标,很大程度上降低了制作成本。镜像式立体靶标容易拆装,无需复杂的机械加工,解决了传统立体靶标结构复杂、加工困难、良品率低、不易保存、成本高等问题;
45、(2)本发明结合计算机视觉和图像处理技术,提出一种基于镜像式立体靶标的视觉系统定位方法,通过立体靶标特征点坐标统一、立体靶标与光学三维传感器的位姿求解、光学三维传感器定位,能够将光学三维传感器在不同位置获取的三维点云转换至全局坐标系下,实现多视点测量数据的全局统一,该视觉系统定位方法对于任意立体靶标具有通用性,并不局限于某一特定形状,适用于多种测量场景;
46、(3)本发明将镜像式立体靶标固定在光学三维传感器上,结合设计的立体靶标和视觉系统定位算法,可用于物体的完整性测量。
- 还没有人留言评论。精彩留言会获得点赞!