基于交替线小域匹配提高水下导航效率和域外可靠性方法与流程
本发明属于水下导航学、人工智能学等交叉领域,涉及基于交替线小域匹配提高水下导航效率和域外可靠性方法。
背景技术:
1、水下重力辅助导航(underwater gravity aided navigation,ugan)作为惯导系统的一种替代技术,是水下潜器实现长航时远距离高精度潜航任务的重要保障。惯导系统因惯性传感器(如加速度计、陀螺仪)误差的时间累积性发散而无法独立满足水下潜航任务的高要求。因此,催生了基于地球固有信息(如重力、地磁、地形)的水下辅助导航技术。得益于地球重力(梯度)场不易受海浪、潮汐等复杂海洋环境影响的长时间相对稳定性,重力辅助导航技术已成为水下无源导航与定位领域的热点研究课题。
2、重力辅助导航的关键模块之一是重力匹配算法,其性能表现影响着水下导航的定位可靠性、效率和精度。目前重力匹配算法可以分为单点匹配和序列匹配两类。相较而言,序列匹配通过一定量采样点(非单点)的相关性最优原则确定潜器的最佳校准位置,具有较强的匹配可靠性,但其定位高耗时问题有待解决。序列匹配算法的典型代表包括地形轮廓匹配算法(tercom)和迭代最近等值线点算法(iccp)。tercom算法具有较好的匹配鲁棒性,且相较于iccp算法表现出对初始位置误差不敏感的特性,故基于tercom算法的重力辅助导航技术已成为水下导航与定位的重要组成成分。但tercom算法却存在着两个潜在问题:1)其匹配格网域内所有点的遍历搜索所导致定位的低效性或时延问题;2)其匹配域内的较少特征或平滑性等则导致其最佳匹配格点与潜器真实位置间较大定位误差的(域内)误匹配并限制了其匹配可靠性。因此,如何改善tercom算法的定位效率和匹配可靠性已成为其研究的两个重要议题。
3、误匹配的发生是影响tercom水下重力辅助导航匹配可靠性的主要因素,因此,许多学者对误匹配的发生原因及其诊断分析等展开了系列研究。wang s.等指出tercom算法在相似特征分布区域的匹配可靠性较差,认为惯导初始误差过大和背景特征较少是导致其误匹配的两大原因,并提出一种tercom误匹配诊断的相似度极值探测法,以提高tercom匹配性能。yan l.等指出重力基准图分辨率低也会导致tercom的较大位置误差。wang k.等以水下地形匹配为例,系统地分析了地形精度、地图分辨率、惯导初始误差等对tercom匹配误差的影响并给出了tercom误匹配的验证性结论。wang j.等指出cor(cross correlation)指标一定程度上会导致tercom的误匹配,而msd(mean squared difference)则是一种确定最相关位置的有效匹配指标且其准确性也略高于mad(mean absolute difference)和cor指标。wu l.等根据航迹ins指示的点间相对位置构造重力模式并在匹配过程中施以约束来消除ins的累积位置误差而提出一种新的水下重力辅助导航方法,仿真结果表明其在定位精度和匹配成功率上均有较大提升。han y.等指出基准图的大分辨率和重力异常分布的不确定性会导致tercom误匹配发生,将空间秩序约束与决策准则约束相结合而提出一种基于图像配准的误匹配诊断方法(受限空间秩序约束算法),以实现tercom误匹配筛选和匹配精度的提高。dai t.等指出匹配区域的特征光滑时tercom、iccp等匹配算法的误匹配概率较高,通过潜器导航特性的拟合模型选择、航迹间仿射变换的误匹配检测和航迹距离比约束而提出一种实时误匹配检测方法,以实现误匹配点的有效检测并改善匹配算法的可靠性。wang r.等提到tercom在低配区易受测量误差影响并产生伪峰或误匹配,同时提出一种基于非线性多地形辅助融合定位的粒子滤波初始化方法,以提高定位稳定性和精度。
4、然而,这些研究主要关注于域内误匹配,即水下潜器真实位置位于tercom有效匹配域内部的一种误匹配。其误匹配原因有平坦(光滑)匹配区域的特征较少或适配区域内评估指标值的邻近差异较小。另一方面,对于域外误匹配的研究则相对较少,即水下潜器真实位置位于tercom有效匹配域外侧的一种误匹配。导致域外误匹配的原因主要包括tercom匹配格网域边界的有限性或域内指标值的近邻相似性(该情形诱因类似于域内误匹配)。
5、本研究团队通过3σ软圆域的边界性判定及其单次域外半圆域再搜索机制而提出一种水下重力辅助导航的软间隔局部半圆域再搜索法,以改善水下潜器域外真实位置的定位可靠性;构造横纵向预匹配线上的域心自适应迁移和以线最佳位置的指标值自适应域生成机制而提出域心自适应迁移匹配法(damm),以提高水下潜器域外真实位置的定位可靠性和匹配效率。测试结果表明:所提算法在3条模拟航迹上10000次测试的匹配效率平均相对提高比约70%,但针对域外误匹配的测试效率平均提高比却仅约30%。究其原因是由于横纵向预匹配线上的最佳位置离潜器真实位置相对较远并自适应生成较大匹配格网域以期覆盖其真实位置,而限制了匹配效率的提升;同时damm算法为调控匹配效率而限定了自适应域格网的最大半边长(2.5σ),由于惯导指示域外真实位置的漂移随机性,故仍会导致一定量的域外误匹配发生。因此,急需要提出提升水下重力辅助导航的定位效率和匹配可靠性的新方法。
技术实现思路
1、本发明的技术解决问题是:克服现有技术的不足,提供基于交替线小域匹配提高水下导航效率和域外可靠性方法,。
2、本发明的技术解决方案是:
3、本发明公开了基于交替线小域匹配提高水下导航效率和域外可靠性方法,包括:
4、步骤1、确定重力基准图上惯导指示终点位置的最近邻格点坐标;
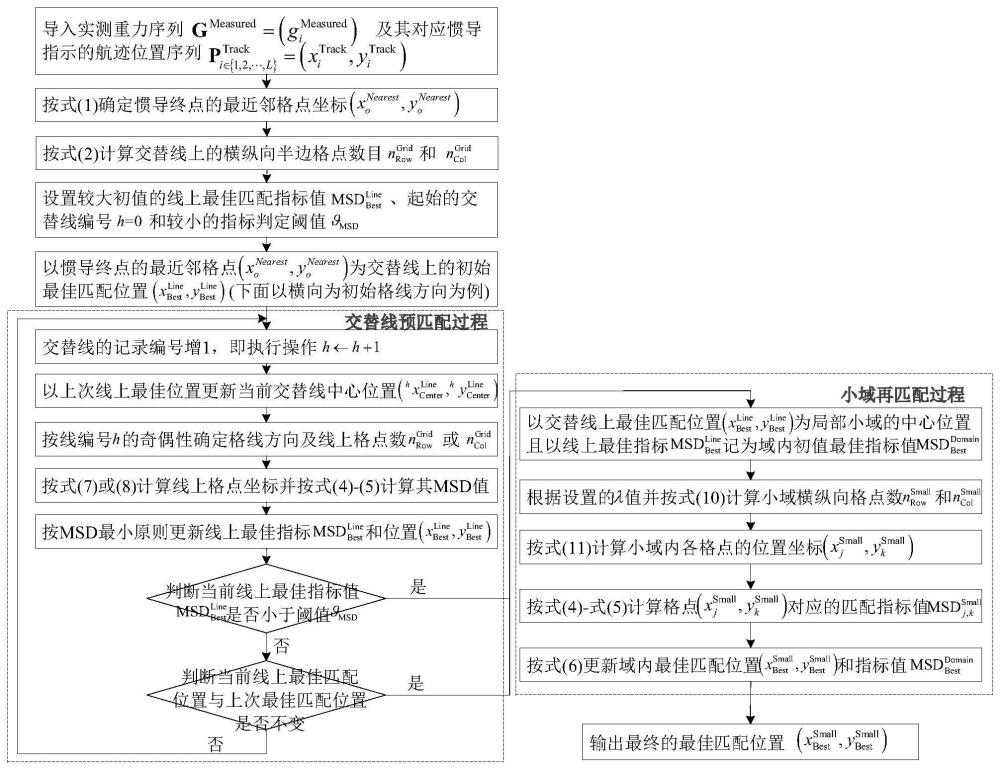
5、步骤2、以所述最近邻格点坐标为中心起点,采用格点线的横纵向交替生成模式,计算满足交替线预匹配终止条件的线上最佳位置
6、步骤3、以所述线上最佳位置为中心,生成局部小域;
7、步骤4、计算所述局部小域的横纵向半边格网数目和
8、步骤5、根据所述局部小域的横纵向半边格网数目,计算所述局部小域内的域内格点位置坐标
9、步骤6、计算所述局部小域内各格点的匹配指标值
10、步骤7、选择局部小域内各格点的匹配指标值为最小的格点位置为局部小域内的最佳匹配位置
11、进一步地,在上述可靠性方法中,所述采用格点线的横纵向交替生成模式,计算满足交替线预匹配终止条件的线上最佳位置具体为:
12、s11、计算第h个横向格点线的匹配指标值和线上最佳匹配位置其中,h为正整数;
13、s12、判断第h横向格点线的匹配指标值是否小于匹配指标阈值θmsd;若是,则第h横向格点线的线上最佳匹配位置为线上最佳位置,退出计算;若否,则进入步骤s13。
14、s13、以所述第h条横向格点线的线上最佳匹配位置为第h+1条纵向格点线的中心坐标,计算第h+1条纵向格点线的匹配指标值和线上最佳匹配位置
15、s14、判断第h+1条纵向格点线线上最佳匹配位置与第h条横向格点线的线上最佳匹配位置是否相等;若是,则第h+1条纵向格点线线上最佳匹配位置为线上最佳位置,退出计算;若否,则重复步骤s11~s13。
16、进一步地,在上述可靠性方法中,所述以所述最近邻格点坐标为中心起点,具体为:中心起点为横向格点线或纵向格点线。
17、进一步地,在上述可靠性方法中,所述计算所述局部小域的横纵向半边格网数目和具体为:
18、
19、其中,为小域的半边长调控因子;和分别表示惯导系统航行累积的横向和纵向漂移误差,表示向上取整;r为重力基准图的格网分辨率。
20、进一步地,在上述可靠性方法中,所述域内格点位置坐标具体为:
21、
22、
23、
24、其中,为满足交替线预匹配终止条件的线上最佳位置,和为局部小域的横纵向半边格网数目,r为重力基准图的格网分辨率。
25、进一步地,在上述可靠性方法中,所述计算所述局部小域内各格点的匹配指标值具体为:
26、
27、其中,为以局部小域内各格点为航迹终点的图上重力提取序列,为水下潜器航迹采样点处重力传感器实测重力序列gmeasured的倒序向量,l为待匹配航迹s上水下潜器航迹采样点数。
28、进一步地,在上述可靠性方法中,所述确定重力基准图上惯导指示终点位置的最近邻格点坐标,具体为:
29、
30、其中,r表示重力基准图的格网分辨率,[·]表示四舍五入取整,为惯导指示终点位置。
31、进一步地,在上述可靠性方法中,所述以局部小域内各格点为航迹终点的图上重力提取序列,具体为:
32、确定局部小域内各格点所对应的逆序航迹s上l个推算位置的坐标;
33、根据所述推算位置的坐标,按照最近邻原则,确定局部小域内各格点逆推航迹s的各位置点在重力图上的最近邻格点;
34、提取所述最近邻格点的重力值,得到以局部小域内格点为航迹终点的图上重力提取序列。
35、进一步地,在上述可靠性方法中,所述确定局部小域内各格点所对应的逆序航迹s上l个推算位置的坐标,具体为:
36、
37、其中,i=1,2,…,l,εv和εβ分别表示水下潜器航速v和航向β的扰动偏差;为局部小域内横纵线上取值分别为j和k的格点位置坐标。
38、进一步地,在上述可靠性方法中,中心起点同时在横向格点线和纵向格点线上时,采用格点线的横纵向交替生成模式,并行计算满足交替线预匹配终止条件的线上最佳位置以并行计算中最先满足交替线预匹配终止条件的线上最佳位置为最后的最佳位置。
39、本发明与现有技术相比的优点在于:
40、(1)本发明打破传统tercom域内所有格点遍历匹配模式,构建基于交替线格点预匹配方式以快速逼近水下潜器真实位置,甚至是3σ域外的真实位置。
41、(2)本发明摒弃大域内大量无效格点匹配,以交替线上最佳匹配位置为中心并辅以小域格点的再匹配机制以有效覆盖并高精度定位水下潜器的真实位置。
42、(3)本发明提出一种融合交替线预匹配和小域再匹配的新型交替线小域匹配法,以提高水下重力辅助导航的定位效率和域外匹配可靠性等综合性能。
43、(4)本发明三条不同重力区航迹的模拟测试结果表明所提算法相对tercom算法的定位效率提升了93%且域外误匹配发生次数的相对降幅高达94%等。
- 还没有人留言评论。精彩留言会获得点赞!