路径处理方法、装置、设备和存储介质与流程
本技术涉及路径规划领域,尤其涉及路径处理方法、装置、设备及存储介质。
背景技术:
1、随着自动化的兴起,地图导航成为研究的热点。为了实现地图导航,一般是采集外界环境形成环境地图,然后基于图搜索的路径规划算法和/或基于采样的路径规划方法得到多个路径点并连接多个路径点,形成规划路径。
2、目前,基于图搜索的路径规划算法和/或基于采样的路径规划方法得到的多个路径点中,存在一些冗余点,使得规划路径上存在一些不必要的弯折,不必要的弯折使得规划路径的长度变长,规划路径不够合理。为了使规划路径更加合理,亟需确定规划路径上的必要路径点。
技术实现思路
1、本技术提供路径处理方法、装置、设备及存储介质,以确定规划路径上的必要路径点。
2、第一方面,提供一种路径处理方法,包括:
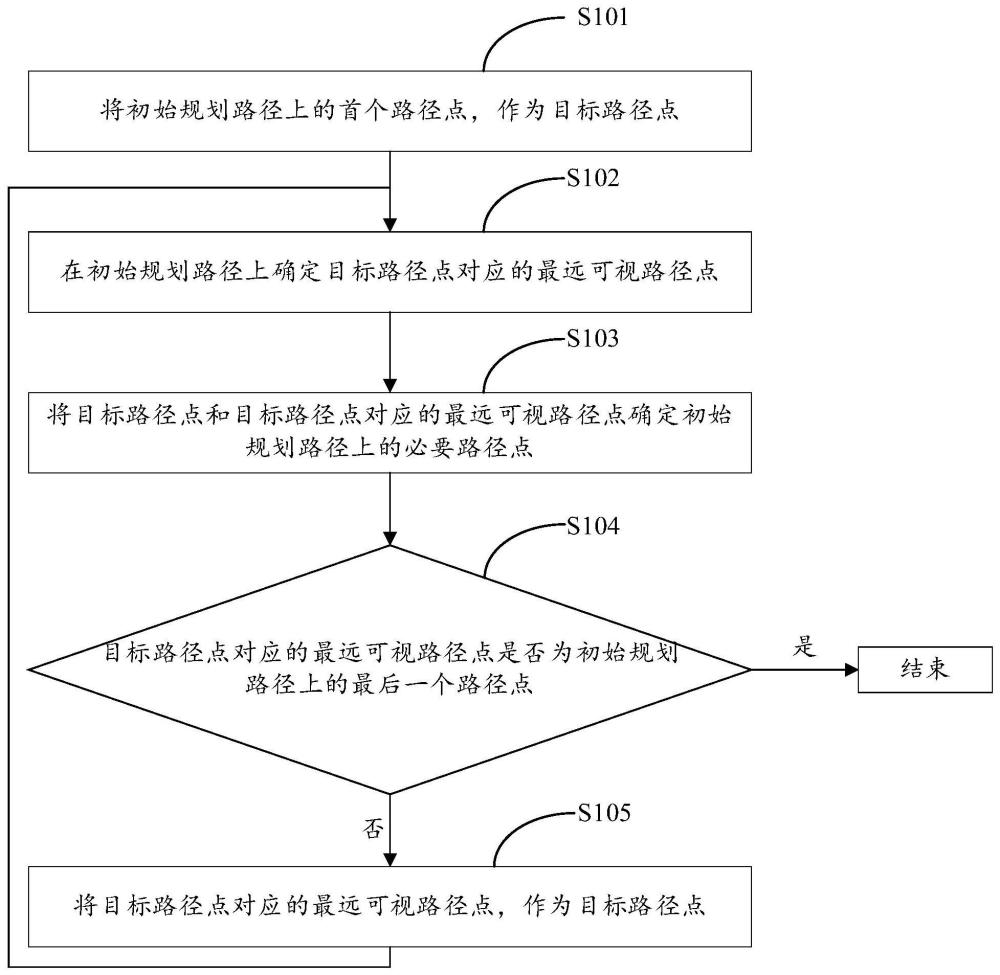
3、在初始规划路径上确定目标路径点对应的最远可视路径点,所述初始规划路径包括多个有序的路径点,所述目标路径点初始为所述初始规划路径上的首个路径点,所述最远可视路径点在所述初始规划路径上位于所述目标路径点之后,所述最远可视路径点与所述目标路径点之间的直接连线上不存在障碍物,并且所述最远可视路径点在所述初始规划路径上距离所述目标路径点最远;
4、将所述目标路径点和所述最远可视路径点,确定为所述初始规划路径上的必要路径点。
5、在该技术方案中,通过在初始规划路径上确定目标路径点对应的最远可视路径点,然后将目标路径点和最远可视路径点确定为初始规划路径上的必要路径点,实现了对规划路径上的必要路径点的检测;由于目标路径点初始为初始规划路径上的首个路径点,最远可视路径点在初始规划路径上位于目标路径点之后,并且最远可视路径点与目标路径点之间的直接连线上不存在障碍物,且在初始规划路径上距离目标路径点最远,将目标路径点与最远可视路径点确定为必要路径点,可以减少目标路径点与最远可视路径点之间的不必要弯折,使得相邻两个必要路径点之间的距离最短,从而缩短规划路径的长度,使得规划路径更为合理。
6、结合第一方面,在一种可能的实现方式中,所述将所述目标路径点和所述最远可视路径点,确定为所述初始规划路径上的必要路径点之后,还包括:将所述最远可视路径点作为所述目标路径点,执行所述在初始规划路径上确定目标路径点对应的最远可视路径点的步骤,直至所述最远可视路径点为所述初始规划路径上的最后一个路径点。当确定出最远可视路径点之后,继续将最远可视路径点确定为目标路径点,继续确定目标路径点对应的最远可视路径点,能够减少整个规划路径上的不必要弯折,使得整个规划路径的长度达到最短。
7、结合第一方面,在一种可能的实现方式中,所述在初始规划路径上确定目标路径点对应的最远可视路径点,包括:将所述目标路径点的下一个路径点作为第一路径点,判断所述第一路径点与所述目标路径点之间的直接连线上是否存在障碍物;若所述第一路径点与所述目标路径点之间的直接连线上存在障碍物,将所述初始规划路径上的所述第一路径点的下一个路径点作为所述第一路径点,执行所述判断所述第一路径点与所述目标路径点之间的直接连线上是否存在障碍物的步骤,直至所述第一路径点为所述初始规划路径上的最后一个路径点;若所述第一路径点与所述目标路径点之间的直接连线上不存在障碍物,将所述第一路径点添加到可视路径点集合,将所述初始规划路径上的所述第一路径点的下一个路径点作为所述第一路径点,执行所述判断所述第一路径点与所述目标路径点之间的直接连线上是否存在障碍物的步骤,直至所述第一路径点为所述初始规划路径上的最后一个路径点;将最后添加到所述可视路径点集合的路径点确定为所述最远可视路径点。
8、结合第一方面,在一种可能的实现方式中,所述在初始规划路径上确定目标路径点对应的最远可视路径点,包括:将所述初始规划路径上的最后一个路径点作为第二路径点,判断所述第二路径点与所述目标路径点之间的直接连线上是否存在障碍物;若所述第二路径点与所述目标路径点之间的直接连线上存在障碍物,将所述初始规划路径上的所述第二路径点的上一个路径点作为所述第二路径点,执行所述判断所述第二路径点与所述目标路径点之间的直接连线上是否存在障碍物的步骤,直至所述第二路径点为所述初始规划路径上的所述目标路径点的下一个路径点;若所述第二路径点与所述目标路径点之间的直接连线上不存在障碍物,将所述第二路径点确定为所述最远可视路径点。从规划路径上的最后一个路径点开始,确定最远可视路径点,能够快速确定最远可视路径点。
9、结合第一方面,在一种可能的实现方式中,所述在初始规划路径上确定目标路径点对应的最远可视路径点,还包括:若所述初始规划路径上位于所述目标路径点之后的每个路径点与所述目标路径点之间的直接连线上均存在障碍物,将所述初始规划路径上的所述目标路径点的下一个路径点,确定为所述目标路径点对应的最远可视路径点。
10、结合第一方面,在一种可能的实现方式中,所述将所述目标路径点和所述最远可视路径点,确定为初始规划路径上的必要路径点之后,包括:在所述初始规划路径上删除位于所述目标路径点和所述最远可视路径点之间的冗余路径点;对删除冗余路径点后的初始规划路径进行平滑处理,得到所述初始规划路径对应的目标规划路径。通过删除规划路径上的冗余路径点,并对删除冗余后的初始规划路径进行平滑处理,能够使得规划路径更为合理。
11、结合第一方面,在一种可能的实现方式中,所述将所述目标路径点和所述最远可视路径点,确定为初始规划路径上的必要路径点之后还包括:依次连接所述初始规划路径上的必要路径点,得到所述初始规划路径对应的结果路径;对所述结果路径进行平滑处理,得到所述初始规划路径对应的目标规划路径。通过连接初始规划路径上的必要路径点并进行平滑处理,能够使得规划路径更为合理。
12、第二方面,提供一种路径处理装置,包括:
13、第一确定模块,用于在初始规划路径上确定目标路径点对应的最远可视路径点,所述初始规划路径包括多个有序的路径点,所述目标路径点初始为所述初始规划路径上的首个路径点,所述最远可视路径点在所述初始规划路径上位于所述目标路径点之后,所述最远可视路径点与所述目标路径点的直接连线上不存在障碍物,并且所述最远可视路径点在所述初始规划路径上距离所述目标路径点最远;
14、第二确定模块,用于将所述目标路径点和所述最远可视路径点,确定为初始规划路径上的必要路径点。
15、第三方面,提供一种计算机设备,包括存储器以及一个或多个处理器,所述存储器连接至所述一个或多个处理器,一个或多个处理器用于执行存储在存储器中的一个或多个计算机程序,一个或多个处理器在执行一个或多个计算机程序时,使得该计算机设备实现上述第一方面的路径处理方法。
16、第四方面,提供一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,计算机程序包括程序指令,上述程序指令当被处理器执行时使上述处理器执行上述第一方面的路径处理方法。
17、本技术可以实现如下技术效果:实现了对规划路径上的必要路径点的检测;由于目标路径点初始为初始规划路径上的首个路径点,最远可视路径点在初始规划路径上位于目标路径点之后,并且最远可视路径点与目标路径点之间的直接连线上不存在障碍物,且在初始规划路径上距离目标路径点最远,将目标路径点与最远可视路径点确定为必要路径点,可以减少目标路径点与最远可视路径点之间的不必要弯折,使得相邻两个必要路径点之间的距离最短,从而缩短规划路径的长度,使得规划路径更为合理。
- 还没有人留言评论。精彩留言会获得点赞!