一种基于北斗的机车定位方法及系统与流程
本发明涉及定位,更具体的,涉及一种基于北斗的机车定位方法及系统。
背景技术:
1、北斗rtk高精度定位技术依托于北斗卫星导航系统,通过多个接收机对卫星信号进行接收和处理,以达到厘米级别的高精度定位。北斗rtk高精度定位技术相较于以往的gps定位拥有更高的精度,且受天气、地形等自然条件的限制小,且稳定可靠、建设成本和运维成本都更低。目前已逐步应用于工业生产、土地测量、矿业勘探、城市规划等各领域的实时精准定位。
2、焦化厂的炼焦生产过程涉及到推焦车、装煤车、拦焦车和熄焦车等多台机车的行走到位、工艺操作和相互协调。如推焦车根据生产计划开到指定的炉孔,对位准确后进行推焦操作,在推焦操作前需与拦焦车、熄焦车等协调是否准备就绪才可执行操作。为提高自动化程度、减轻操作人员劳动强度、改善工作环境、提高生产安全,焦化机车的自动化、无人化升级改造极为迫切。而机车的实时、稳定精准定位则是实现焦化机车的自动操作的基础,因为各车辆动作的对位精度要求非常高,如果机车根据计划不断的前往不同炉号过程中的对位存在偏差,在后续操作中会造成焦炉和机车损坏,将无法进行后续如推焦等工艺操作。
3、目前,传统的焦炉机车位置检测采用基于在机车上和焦炉炉体近距离安装检测设备的技术进行检测,由于距离焦炉炉体较近存在高温损坏的风险,且检测手段单一、出现故障时可能造成系统故障和生产事故。
技术实现思路
1、鉴于上述问题,本发明的目的是提供一种基于北斗的机车定位方法及系统,能够提供准确的机车位置。
2、本发明第一方面提供了一种基于北斗的机车定位方法,包括:
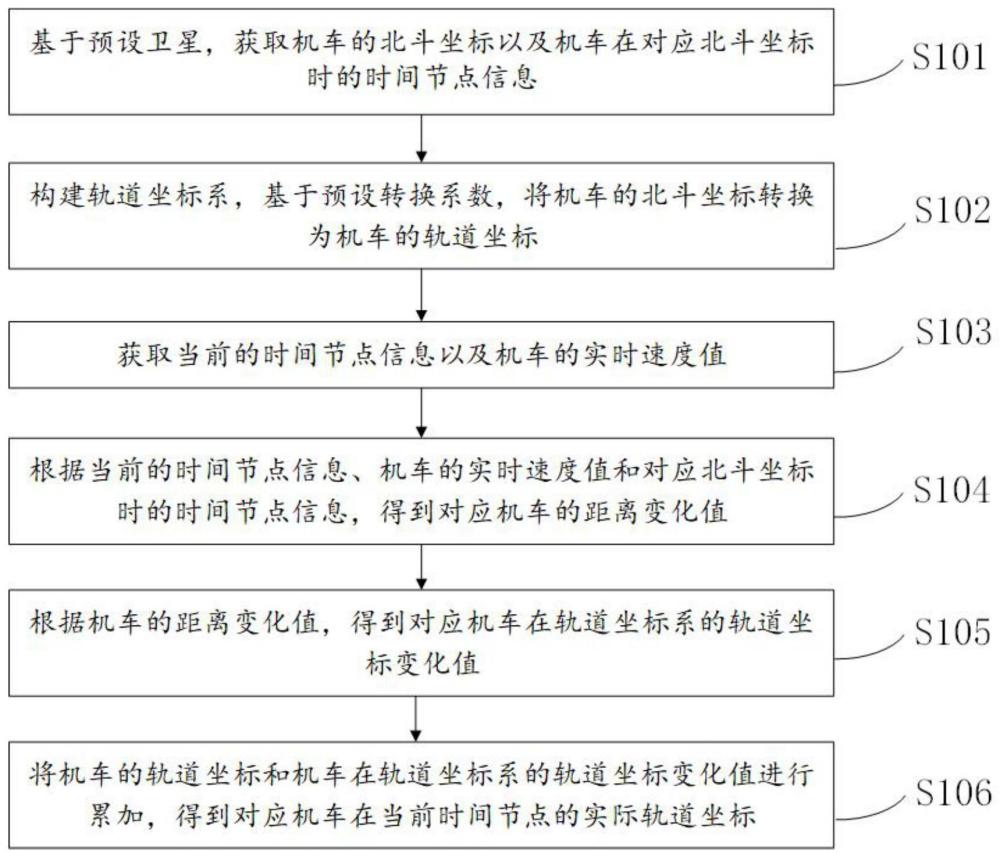
3、基于预设卫星,获取机车的北斗坐标以及机车在对应北斗坐标时的时间节点信息;
4、构建轨道坐标系,基于预设转换系数,将机车的北斗坐标转换为机车的轨道坐标;
5、获取当前的时间节点信息以及机车的实时速度值;
6、根据当前的时间节点信息、机车的实时速度值和对应北斗坐标时的时间节点信息,得到对应机车的距离变化值;
7、根据机车的距离变化值,得到对应机车在轨道坐标系的轨道坐标变化值;
8、将机车的轨道坐标和机车在轨道坐标系的轨道坐标变化值进行累加,得到对应机车在当前时间节点的实际轨道坐标。
9、本方案中,所述构建轨道坐标系的步骤,具体包括:
10、获取机车的行车轨道和机车的初始位置信息;
11、将所述机车的行车轨道设为轨道坐标系中的方向轴,将所述机车的初始位置设为对应轨道坐标系中的坐标原点;
12、基于预设距离间隔,在机车的行车轨道之上设置参考点,并依次设置对应参考点的编号;
13、将相邻编号的参考点进行连接,得到参考线,并提取相邻参考线的角度值;
14、判断所述相邻参考线的角度值是否大于预设角度阈值,若是,将相邻参考线中的后面参考线的中间位置增加一个参考点;若否,则不需增加参考点。
15、本方案中,所述若否,将相邻参考线后面的参考线的中间位置增加一个参考点之后,还包括:
16、将参考点进行重新编号,并将增加的参考点和对应的相邻参考点进行连接,得到第二参考线,并提取对应相邻第二参考线的角度值;
17、若相邻第二参考线的角度值大于预设角度阈值,则获取增加的参考点至相邻参考点之间的距离值;
18、当增加的参考点至相邻参考点之间的距离值小于或等于预设距离阈值时,停止增加参考点;
19、当增加的参考点至相邻参考点之间的距离值大于预设距离阈值时,继续增加参考点;
20、若第二参考线的角度值小于或等于预设角度阈值,则停止增加参考点。
21、本方案中,所述预设转换系数的获取步骤,具体包括:
22、基于预设标准环境,获取参考点在轨道坐标系中的坐标点;
23、基于多个北斗卫星,获取对应参考点在北斗坐标系中的多个坐标点;
24、将参考点在轨道坐标系中的坐标点和对应参考点在北斗坐标系中的坐标点分别构建三元一次方程,并组成不同的三元一次方程组,得到对应参考点的不同求解集合;
25、将所述参考点的不同求解集合中的数据进行均值计算,得到对应参考点位置至下一个参考点位置之间的预设转换系数。
26、本方案中,还包括:
27、当机车行驶至参考点时,获取对应机车在参考点位置的北斗坐标信息;
28、获取对应参考点位置的轨道坐标信息;
29、根据对应机车在参考点位置的北斗坐标和对应参考点位置的轨道坐标,得到对应机车在当前参考点位置的实际转换系数;
30、将对应机车在当前参考点位置的实际转换系数减去对应参考点位置的预设转换系数,得到转换系数差值;
31、将所述转换系数差值除以对应参考点位置的预设准换系数,得到对应参考点位置的预设转换系数偏差率;
32、判断所述参考点位置的预设转换系数偏差率是否大于预设第一阈值,若是,触发警示信息;若否,按照当前参考点位置的预设转换系数对北斗坐标进行转换处理。
33、本方案中,所述若是,触发警示信息之后,还包括:
34、根据机车在当前参考点位置的实际转换系数对参考点位置的预设转换系数进行替换调整,并获取当前机车所在的环境信息;
35、提取预设标准环境信息中的第一特征值,当前机车所在的环境信息中的第二特征值;
36、将相同特征的第一特征值和第二特征值进行差值计算,得到特征差值;
37、判断所述特征差值是否大于对应特征的特征差阈值,若是,生成对应特征值调整信息;
38、根据对应特征值调整信息对当前机车所在的环境进行调整。
39、本方案中,所述根据当前的时间节点信息、机车的实时速度值和对应北斗坐标时的时间节点信息,得到对应机车的距离变化值的步骤,具体包括:
40、将当前的时间节点减去对应北斗坐标时的时间节点,得到反应时间差;
41、提取反应时间差所在的时间节点;
42、将所述反应时间差所在的时间节点乘以对应机车的实时速度值,得到对应反应时间差所在的时间节点的距离值;
43、将所有反应时间差所在的时间节点的距离值进行累加,得到对应机车的距离变化值。
44、本发明第二方面提供了一种基于北斗的机车定位系统,包括存储器和处理器,所述存储器中存储有一种基于北斗的机车定位方法程序,所述一种基于北斗的机车定位方法程序被所述处理器执行时实现如下步骤:
45、基于预设卫星,获取机车的北斗坐标以及机车在对应北斗坐标时的时间节点信息;
46、构建轨道坐标系,基于预设转换系数,将机车的北斗坐标转换为机车的轨道坐标;
47、获取当前的时间节点信息以及机车的实时速度值;
48、根据当前的时间节点信息、机车的实时速度值和对应北斗坐标时的时间节点信息,得到对应机车的距离变化值;
49、根据机车的距离变化值,得到对应机车在轨道坐标系的轨道坐标变化值;
50、将机车的轨道坐标和机车在轨道坐标系的轨道坐标变化值进行累加,得到对应机车在当前时间节点的实际轨道坐标。
51、本方案中,所述构建轨道坐标系的步骤,具体包括:
52、获取机车的行车轨道和机车的初始位置信息;
53、将所述机车的行车轨道设为轨道坐标系中的方向轴,将所述机车的初始位置设为对应轨道坐标系中的坐标原点;
54、基于预设距离间隔,在机车的行车轨道之上设置参考点,并依次设置对应参考点的编号;
55、将相邻编号的参考点进行连接,得到参考线,并提取相邻参考线的角度值;
56、判断所述相邻参考线的角度值是否大于预设角度阈值,若是,将相邻参考线中的后面参考线的中间位置增加一个参考点;若否,则不需增加参考点。
57、本方案中,所述若否,将相邻参考线后面的参考线的中间位置增加一个参考点之后,还包括:
58、将参考点进行重新编号,并将增加的参考点和对应的相邻参考点进行连接,得到第二参考线,并提取对应相邻第二参考线的角度值;
59、若相邻第二参考线的角度值大于预设角度阈值,则获取增加的参考点至相邻参考点之间的距离值;
60、当增加的参考点至相邻参考点之间的距离值小于或等于预设距离阈值时,停止增加参考点;
61、当增加的参考点至相邻参考点之间的距离值大于预设距离阈值时,继续增加参考点;
62、若第二参考线的角度值小于或等于预设角度阈值,则停止增加参考点。
63、本方案中,所述预设转换系数的获取步骤,具体包括:
64、基于预设标准环境,获取参考点在轨道坐标系中的坐标点;
65、基于多个北斗卫星,获取对应参考点在北斗坐标系中的多个坐标点;
66、将参考点在轨道坐标系中的坐标点和对应参考点在北斗坐标系中的坐标点分别构建三元一次方程,并组成不同的三元一次方程组,得到对应参考点的不同求解集合;
67、将所述参考点的不同求解集合中的数据进行均值计算,得到对应参考点位置至下一个参考点位置之间的预设转换系数。
68、本方案中,还包括:
69、当机车行驶至参考点时,获取对应机车在参考点位置的北斗坐标信息;
70、获取对应参考点位置的轨道坐标信息;
71、根据对应机车在参考点位置的北斗坐标和对应参考点位置的轨道坐标,得到对应机车在当前参考点位置的实际转换系数;
72、将对应机车在当前参考点位置的实际转换系数减去对应参考点位置的预设转换系数,得到转换系数差值;
73、将所述转换系数差值除以对应参考点位置的预设准换系数,得到对应参考点位置的预设转换系数偏差率;
74、判断所述参考点位置的预设转换系数偏差率是否大于预设第一阈值,若是,触发警示信息;若否,按照当前参考点位置的预设转换系数对北斗坐标进行转换处理。
75、本方案中,所述若是,触发警示信息之后,还包括:
76、根据机车在当前参考点位置的实际转换系数对参考点位置的预设转换系数进行替换调整,并获取当前机车所在的环境信息;
77、提取预设标准环境信息中的第一特征值,当前机车所在的环境信息中的第二特征值;
78、将相同特征的第一特征值和第二特征值进行差值计算,得到特征差值;
79、判断所述特征差值是否大于对应特征的特征差阈值,若是,生成对应特征值调整信息;
80、根据对应特征值调整信息对当前机车所在的环境进行调整。
81、本方案中,所述根据当前的时间节点信息、机车的实时速度值和对应北斗坐标时的时间节点信息,得到对应机车的距离变化值的步骤,具体包括:
82、将当前的时间节点减去对应北斗坐标时的时间节点,得到反应时间差;
83、提取反应时间差所在的时间节点;
84、将所述反应时间差所在的时间节点乘以对应机车的实时速度值,得到对应反应时间差所在的时间节点的距离值;
85、将所有反应时间差所在的时间节点的距离值进行累加,得到对应机车的距离变化值。
86、本发明公开的一种基于北斗的机车定位方法及系统,通过北斗定位系统和参考点的双冗余检测方式,以互相校验、融合判断的方式提供准确的机车位置,具有稳定性高、检测精度高、位置连续和实时性高的特点。
- 还没有人留言评论。精彩留言会获得点赞!