一种用于光伏晶片检测的高速定位检测平台
本发明属于机电自动化领域,具体的提出一种用于光伏晶片检测的高速定位检测平台。
背景技术:
0、技术背景
1、
2、太阳能资源取之不尽,用之不竭,而且太阳能在地球上分布广泛,只要有光照的地方就可以使用光伏发电系统,不受地域、海拔等因素的限制,所以光伏被认为是最清洁的能源,光伏晶片的生产制造过程是光伏行业能否飞速发展和早日实现“双碳”目标的关键。在光伏晶片的生产制造中需要进行频繁的搬运工作,必须要在高速、高精度、防破等制约因素下完成一道道工序。在这些搬运过程中难免会有磕磕碰碰,光伏晶片难免会出现破损、晶片崩边、微裂纹层等缺陷等状况,会影响到光伏晶片的性能,因此在出厂前进行检测并划分等级十分重要。而且光伏晶片超薄易碎,既要追求检测的效率,又要追求检测的过程中减少造成光伏晶片损伤的可能性。传统的检测传送装置速度慢,且晶片与检测装置之间的角度会随传送带的传送速度造成一定的变化,不能保证每个晶片传送到检测装置时候都保持与检测设备相同的角度,,传送带也只能有比较小的初速度,这就会造成检测分类的不精准,检测的效率低下。
3、综上所述,为了提高光伏晶片生产过程中传送缓慢,检测效率低等问题提出了一种光伏晶片检测的高速定位检测平台。
技术实现思路
1、本发明发目的是针对现有技术的不足,提供一种用于光伏晶片检测的高速定位检测平台。
2、本发明解决器件书问题所采用的技术方案如下:
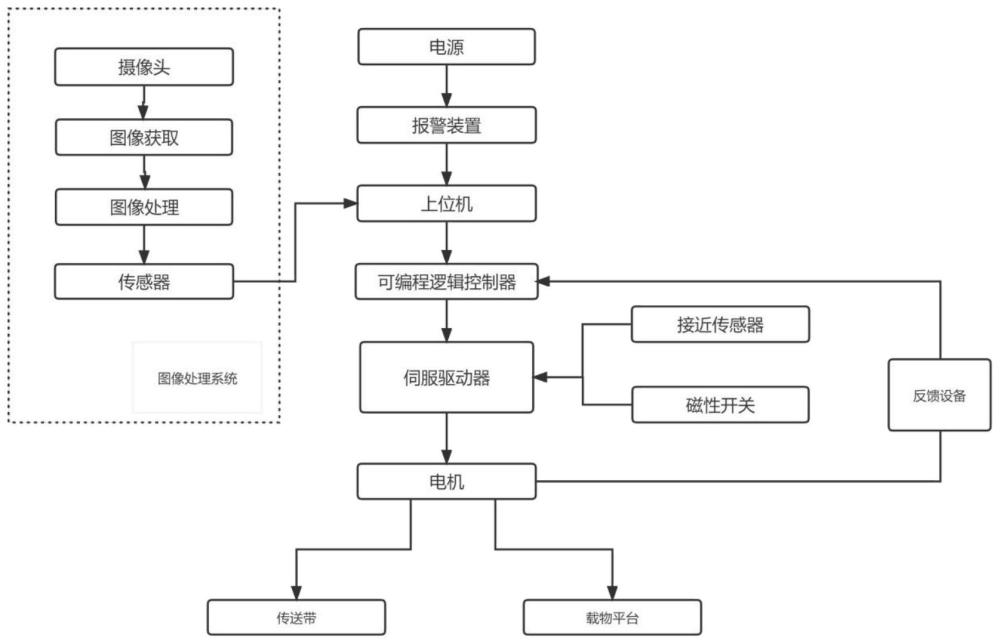
3、一种用于光伏晶片检测的高速定位检测平台,包括控制模块和机械结构两部分,控制模块包括电源模块、报警安全装置、工控机、控制卡、可编程逻辑控制器;电源模块用于电力供给;工控机与可编程逻辑控制器、安全报警装置连接,工控机上运行有工控机软件,工控机软件能够反映报警安全装置、电源模块运行状态和参数,同时显示可编程逻辑控制器的各个接口状态;报警安全装置接收到工控机发出的异常指令时会及时切断电源,并通过其内置的指示灯、蜂鸣器设备进行预警;可编程逻辑控制器与机械结构中的传感器组和电机驱动器相连,可编程逻辑控制器能够获取各类传感器的信号;所述的控制卡插入工控机主机的pci插槽中运行工作;机械结构包括多个电机、电机驱动器、载物平台、多组传感器组以及上下两个检测平台,u轴电机(1)、v轴电机(3)、电机驱动轴(17)、v轴电机驱动轴(18)安装在载物平台(6)的一个侧面,上下两个检测平台安装在载物平台(6)的另一个侧面;第一z向电机(10)和第二z向电机(11)与电机驱动器相连接,分别通过滑轨驱动第一检测平台(15)和第二检测平台(16)的移动和调整,当第二检测平台(16)和第一检测平台(15)均完成对待检测光伏晶片的贴合以后,第一检测平台(15)下降完成对待检测光伏晶片的贴合。
4、进一步的,u轴电机(1)为对位平台的左右横向移动提供动力,v轴电机(3)为对位平台的前后横向移动提供动力,u轴电机(1)和v轴电机(3)相互配合能够完成对位平台的角度旋转,当u轴电机(1)受到电机驱动器驱动时,会驱动与u轴电机(1)相连接的u轴电机驱动轴(17),配合交叉滚子轴承(2),从而带动平台进行旋转以及平移;当v轴电机(3)受到电机驱动器驱动时,会驱动与v轴电机(3)相连接的v轴电机驱动轴(18),配合交叉滚子轴承(2),从而带动平台进行旋转以及平移。
5、进一步的,第一z向电机(10)和第二z向电机(11)与电机驱动器相连接,分别通过滑轨19驱动第一检测平台(15)和第二检测平台(16)的上下移动;第一检测平台(15)和第二检测平台(16)上对称设置有探针(12);第二检测平台(16)中设置有第四传感器组(16-1)和光栅尺检测电机(16-2),传感器组第四传感器组(16-1)用于检测第二检测平台上的探针(12)与待检测光伏晶片的距离信号,并将距离信号反馈给工控机,光栅尺检测电机(16-2)定位探针(12)与待检测光伏晶片的直线误差信号,并将定位的直线误差信号反馈给工控机;第一检测平台(15)中设置有第三传感器组(15-1)、图像采集卡(15-2)和相机(15-3),第三传感器组(15-1)用于检测第一检测平台上的探针(12)与待检测光伏晶片的距离信号,并将距离信号反馈给工控机,相机(15-3)用于获取待检测光伏晶片与探针的相对位置图片,图像采集卡采集相对位置图片反馈给工控机。
6、进一步的,本发明具体实现流程如下:图像检测与获取装置的传送带上放置待检测光伏晶片,由摄像头俯视拍照,获取图像检测与传送带的相对角度图像;将控制卡插入工控机主机的pci插槽中,通过工控机软件发送定位指令,由控制卡中的图像算法对图像检测与获取装置获取的相对角度图像进行处理,将图像算法处理得到的结果反馈给工控机,工控机根据接收到的结果发出定位信号,经过电机驱动器接收并将定位信号放大后发送给u轴电机(1)和v轴电机(3),u轴电机(1)和v轴电机(3)分别通过u轴电机驱动轴(17)和v轴电机驱动轴(18),配合交叉滚子轴承(2),从而带动平台进行旋转以及平移来调整平台角度,保证第二检测平台(16)上的探针(12)与待检测光伏晶片完全贴合,第二检测平台(16)中设置有第四传感器组(16-1)和光栅尺检测电机(16-2),第四传感器组(16-1)用于检测第二检测平台上的探针(12)与待检测光伏晶片的距离信号,并将距离信号反馈给工控机,光栅尺检测电机(16-2)定位探针(12)与待检测光伏晶片的直线误差信号,并将定位的直线误差信号反馈给工控机,工控机根据接收到的距离信号和直线误差信号的具体数值对第二检测平台(16)进行调整,当距离信号和直线误差信号的具体数值为0时,第二检测平台(16)不进行调整;当第二检测平台(16)完成对待检测光伏晶片的贴合以后对第一检测平台(15)进行调整,第一检测平台(15)中设置有第三传感器组(15-1)、图像采集卡(15-2)和相机(15-3),第三传感器组(15-1)用于检测第一检测平台(15)上的探针(12)与待检测光伏晶片的距离信号,并将距离信号反馈给工控机,相机(15-3)用于获取的待检测光伏晶片与探针的相对位置图片,图像采集卡采集相对位置图片反馈给工控机,控制卡中的图像算法对相对位置图片进行处理后获得相对位置信息,控制卡中的位移反解算法基于相对位置信息反解出对位贴合所需要的运动位移。
7、进一步的,当第二检测平台(16)和第一检测平台(15)均完成对待检测光伏晶片的贴合以后,第一检测平台(15)下降完成对待检测光伏晶片的贴合;第一检测平台(15)上的第三传感器组(15-1)、图像采集卡(15-2)和相机(15-3)再次检测贴合晶片的位置信息并反馈给工控机,同时第二检测平台(16)上的第四传感器组(16-1)和光栅尺检测电机(16-2)也将检测信息反馈给工控机,控制卡中的位移反解算法基于获取的位置信息反解出对位贴合所需要的运动位移;若该运动位移在误差范围内,则直接计算得到最终的晶片贴合度,若该运动位移超出误差范围,则继续调整第一检测平台(15)。
8、本发明的有益效果如下:
9、1、本发明采用了以电机为核心的稳定平台,通过将驱动轴安装在同一个平面内可以实现结构简单,超薄的结构特性。并且平台驱动轴安装在同一平面上,驱动轴之间互不影响,能够消除传统平台因为驱动轴之间相互影响带来的误差。
10、2、本发明设计了工控机为核心的人机交互系统,编程逻辑控制器连接并通过工控机软件实时监控系统各个组件的工作状态和传感器数据,用户可根据需要下达相应指令,提高了人机交互灵活性,方便了用户操作。
11、3、本发明对于检测平台加装了图像捕捉系统,能够实时算出检测平台和光伏晶片的贴合度,并反馈给工控机,工控机通过控制可编程逻辑控制器及时对检测平台做出调整,大幅度提高了光伏晶片与检测平台的贴合度,使得检测结果更加精准。由于平台角度调整速度非常快,这也大幅度的提升了检测的效率。
- 还没有人留言评论。精彩留言会获得点赞!