本发明涉及单光子激光雷达探测技术,尤其涉及一种基于主被动融合的单光子激光雷达系统及成像方法。
背景技术:
1、近年来,随着单光子探测器技术和量子成像技术的不断发展,单光子激光雷达技术应运而生,其在科学研究、空间探测、设施巡查等领域具有广泛的需求和应用。单光子激光雷达技术利用单光子探测器(spads)的高灵敏度及皮秒级时间分辨特性,极大地提升了激光雷达系统的探测距离及距离分辨率,已经成为当前的热门研究领域。
2、2003年,美国mit研发了geniii系列apd阵列,阵列规模为32×32,并基于此阵列完成了机载单光子激光雷达三维成像实验,是首次利用单光子回波的激光雷达系统。英国heriot-watt university的研究人员研制了探测距离为10.5km的单光子激光雷达三维成像系统。2021年,中国科技大学的研究人员采用单点扫描的成像方式,实现了200km的单光子激光雷达三维成像。
3、为了解决激光雷达视场小、光谱特性缺失等问题,国内外研究机构也提出了多种主被动融合的技术。如中国发明专利(公开号为cn108564644a)公开了一种机载主被动三维影响实时成像装置及方法,其主要采用fpga与dsp相结合的并行拓扑处理架构,有效地实现了性能与功耗的平衡。
4、中国发明专利(公开号为cn11476705a)公开了一种主被动三维成像实时处理系统及方法,采用软硬结合的soc(system on chip,片上系统)设计技术,提高系统运算能力,实现了低功耗、高速的数据处理,克服了单一处理器架构下因算法复杂度等带来的实时性差等缺点。
5、中国发明专利(公开号为cn110579773a)公开了一种基于多探测器的单光子激光雷达探测系统及方法,其采用多个波段的探测器对同一目标进行单光子探测,有效去除了噪声的影响,降低了虚警率,进而提升了探测性能。
6、综上,现有主被动融合激光雷达技术方案均采用软硬件相结合的方式,或从信号处理端入手,实现主被动信号计算能力的提升,进而降低系统功耗;或增加观测光谱范围提升探测性能。该类技术综合性能良好,但在开展大视场目标搜索、小视场精确跟踪时却因实时性差、目标解算能力不足等受到极大的限制。
技术实现思路
1、本发明的目的在于提供一种基于主被动融合的单光子激光雷达系统及成像方法,用以解决现有技术在开展大视场目标搜索、小视场精确跟踪时因实时性差、目标解算能力不足等受到限制的技术问题。
2、为实现上述目的,本发明的技术解决方案如下:
3、一种基于主被动融合的单光子激光雷达系统,其特殊之处在于:
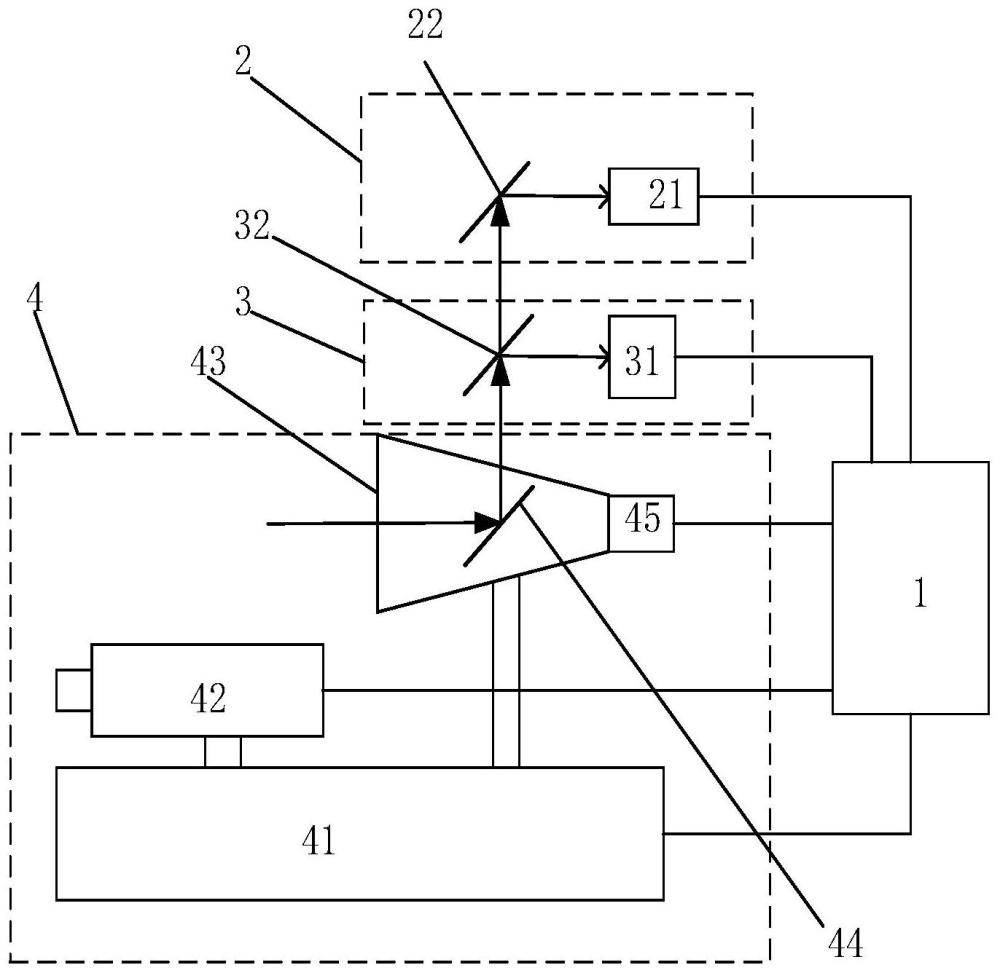
4、包括主控单元、被动监测单元、被动探测单元和主动探测单元;
5、所述被动监测单元包括ccd探测器和反射镜;所述ccd探测器位于反射镜的反射光路上;
6、所述被动探测单元包括光谱探测仪和第二分光镜;所述光谱探测仪位于第二分光镜的反射光路上;所述反射镜位于第二分光镜的透射光路上;
7、所述主动探测单元包括转台,以及分别设置在转台上的激光器和接收模块;激光器的出射光经目标物反射形成反射光并进入接收模块;所述接收模块内部设有第一分光镜,输出端设有单光子探测器;所述单光子探测器位于第一分光镜的透射光路上,所述第二分光镜位于第一分光镜的反射光路上;
8、经目标物反射形成的反射光经第一分光镜后分成两路,一路进入单光子探测器内,另一路经第二分光镜后再次分为两路,其中一路进入光谱探测仪,另外一路经反射镜后进入ccd探测器;
9、所述主控单元分别与ccd探测器、光谱探测仪、转台、激光器及单光子探测器连接,分别用于接收ccd探测器、光谱探测仪及单光子探测器的输出信息,以及对转台、激光器进行控制。
10、进一步地,所述转台为三维转台,用于实现俯仰、偏航、旋转角度的三维移动;
11、所述ccd探测器为可见光ccd探测器;
12、所述激光器为高重频红外激光器,照明功率为10khz-10mhz;
13、所述接收模块为望远镜;
14、所述单光子探测器为面阵式单光子探测器。
15、进一步地,所述第一分光镜为红外分光镜,其对红外波段透射,其他波段反射;
16、所述第二分光镜为半透半反分光镜;
17、所述光谱探测仪为可见光及红外光谱仪。
18、此外,本发明还提供一种基于主被动融合的单光子激光雷达成像方法,采用上述的基于主被动融合的单光子激光雷达系统,其特殊之处在于,包括以下步骤:
19、步骤1】被动监视
20、1.1】采用ccd探测器对待监测区域进行大视场监测,并将监测信息实时反馈至主控单元;
21、1.2】主控单元若从监测信息中获取突入目标物信息,则执行步骤2】,启动光谱探测仪进行被动探测;反之,返回步骤1.1】,ccd探测器持续监测;所述突入目标物信息包括突入目标物的形貌及其相对接收模块主轴方向的角度信息;
22、步骤2】被动探测
23、2.1】通过光谱探测仪对突入目标物进行光谱探测,获取突入目标物的光谱信息,进而获取突入目标物的材质信息,并实时反馈至主控单元;
24、2.2】主控单元基于步骤1.2】的突入目标物形貌及步骤2.1】的材质信息对突入目标物进行分析,若突入目标物属于预先设定的待探测目标,则执行步骤3】,进入主动探测;反之,返回步骤2.1】,光谱探测仪持续探测;
25、步骤3】主动探测
26、3.1】主控单元基于步骤1.2】获取的角度信息,通过控制转台调整接收模块的方向,使得接收模块对准突入目标物并持续跟踪,同时启动激光器和单光子探测器;
27、3.2】激光器的出射光经突入目标物反射形成反射光并进入接收模块,反射光中的单光子信号经第一分光镜透射后进入单光子探测器,由单光子探测器获取突入目标物的小视场三维信息,并实时反馈至主控单元;所述小视场三维信息包括突入目标物的三维结构、距离信息、速度及加速度信息;
28、3.3】主控单元将步骤1.2】获取的突入目标信息、步骤2.1】获取的光谱信息、以及步骤3.2】获取的小视场三维信息进行融合,进而实现对突入目标物基于主被动融合的单光子激光雷达成像。
29、进一步地,步骤1.2】中,主控单元通过差帧比较的方法,将接收到的监测信息中的相邻两帧图像进行比较,并采用图像相减的检测算法,获取待监测区域出现的突入目标物信息。
30、进一步地,步骤2.2】中,主控单元对光谱信息中不同谱段的光强图像进行融合对比,即可获知突入目标物的材质信息,同时结合突入目标物的形貌,通过判断获知突入目标物是否属于预先设定的待探测目标。
31、进一步地,步骤3.2】中,所述激光器为高重频红外激光器,照明功率为10khz-10mhz;所述激光器的调制单元上施加有二进制编码,用于实现对出射光进行编码调制,通过单光子探测器提取该二进制编码,从而提升单光子信号的信噪比及其抗干扰性。
32、进一步地,步骤3.2】中,所述接收模块为望远镜,所述小视场是指以望远镜主轴为中心轴线,周向偏转±(3~6)°的视场。
33、进一步地,步骤3.2】中,所述单光子探测器对接收到的单光子信号进行3d数据处理后,获取突入目标物的小视场三维图像,进一步通过计算可获知该突入目标的三维结构、距离信息、速度及加速度信息。
34、进一步地,步骤3.3】中,采用图像叠加的方法进行融合。
35、与现有技术相比,本发明的有益效果如下:
36、1、本发明提出的基于主被动融合的单光子激光雷达系统,包括主控单元、被动监测单元、被动探测单元和主动探测单元,采用被动式光谱探测仪与主动式单光子探测器相融合的激光雷达设计方案,通过对远距离突入目标物的被动光谱探测,获取其光谱信息,以及通过小视场的主动探测,获取突入目标物的小视场三维信息,进而通过信息融合,提升了对突入目标物进行大视场目标搜索、小视场精确跟踪的高精度探测。
37、2、本发明提出的基于主被动融合的单光子激光雷达系统,通过同平台搭载ccd探测器、光谱探测仪及单光子探测器,从而可满足多场景的应用需求。
38、3、本发明提出的基于主被动融合的单光子激光雷达成像方法,采用可见光ccd探测器和可见光及红外光谱仪,对大视场内出现的目标进行多谱段探测及识别,确定目标的类别以及相对角度信息;再采用三维转台将望远镜的主轴方向对准突入目标物并持续跟踪,最后采用单光子探测器,对突入目标物进行小视场三维成像,以此实现对突入目标物的多维观测及预警。
39、4、本发明提出的基于主被动融合的单光子激光雷达成像方法,采用大视场被动探测与小视场主动探测相结合的方式,对远距离大视场内出现的目标进行多维探测及预警,有效地解决了现有单光子激光雷达面阵规模小、光谱特征缺失等核心问题,提升了现有激光雷达探测系统的适用性。