一种基于RSM的水下机器人定位方法与流程
本发明属于水电站水工检测,尤其涉及一种基于rsm的水下机器人定位方法。
背景技术:
1、水电站水工隧洞检测目前正在向智能化和无人化发展,目前已有水下机器人进行相关检测。但引水隧洞的长度几乎都超过了1公里,最长可达20多公里,在隧洞处于满水状态时水下机器人的难以进行定位。水、隧洞的洞壁和隧洞上方的山体对电磁波的屏蔽导致卫星定位或常规的浮标定位方法均无法实施。
2、而在开阔水域中,由于水下环境的复杂性和机器人有限的传感能力,在满水状态下的隧洞中实现水下机器人的定位十分具有挑战性的,目前普遍采用的技术包括gps定位、声呐定位、惯性导航定位和技术组合定位,其中,技术组合定位通常为声呐和惯性导航的组合。现有的定位方法受制于电磁波在介质中的衰减,若将开阔水域中的水下机器人定位方法直接应用在长距离隧洞中,gps和无线通讯在满水的隧洞中会完全被屏蔽,且惯性导航系统也会受到陀螺仪漂移和加速度计误差的影响,随着误差的累积,最终的定位精度很难达到米级,其误差往往超过几米,甚至几十米,严重影响机器人在水下的检测结果准确性。
技术实现思路
1、针对现有技术中的上述不足,本发明提供的一种基于rsm的水下机器人定位方法,通过惯性导航参数结合水下机器人脐带线缆缩放长度,随水下机器人入水探测同时对水下机器人进行同步的初步定位,并基于rsm利用电磁粒子波的方式对水下机器人进行二次的精确定位。本发明通过两次定位解决了水工隧洞中水下机器人定位准确度和效率不足的问题。
2、为了达到上述发明目的,本发明采用的技术方案为:
3、本发明提供的一种基于rsm的水下机器人定位方法,包括如下步骤:
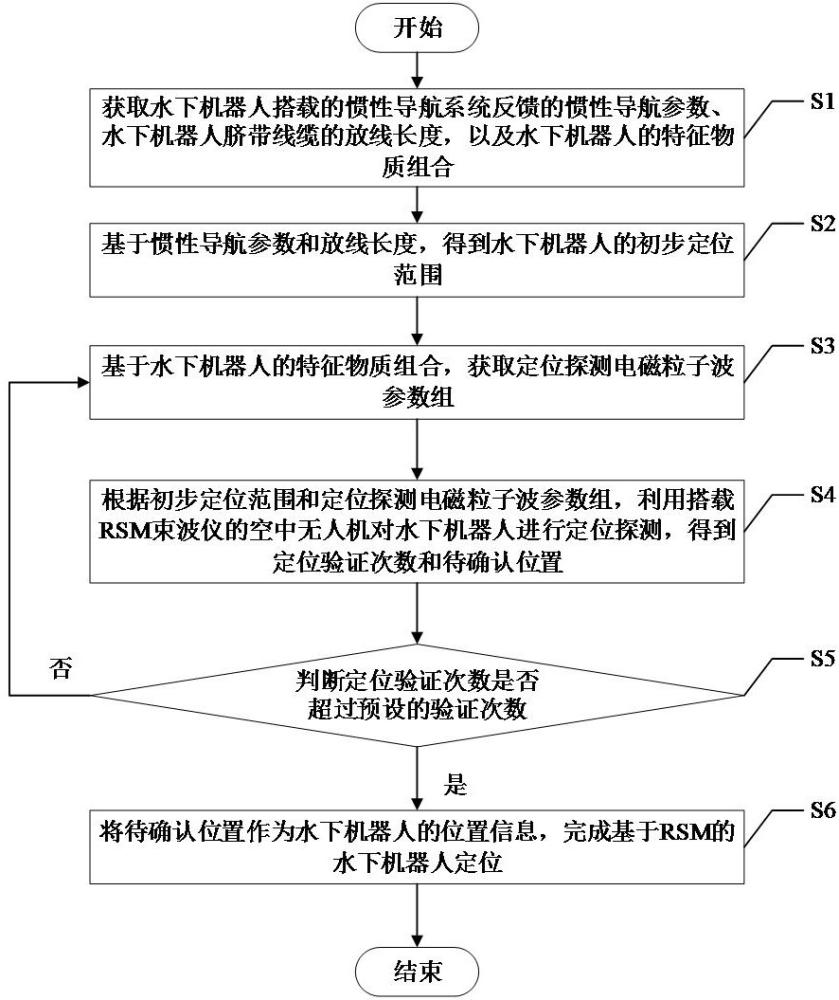
4、s1、获取水下机器人搭载的惯性导航系统反馈的惯性导航参数、水下机器人脐带线缆的放线长度,以及水下机器人的特征物质组合;
5、s2、基于惯性导航参数和放线长度,得到水下机器人的初步定位范围;
6、s3、基于水下机器人的特征物质组合,获取定位探测电磁粒子波参数组;
7、s4、根据初步定位范围和定位探测电磁粒子波参数组,利用搭载rsm束波仪的空中无人机对水下机器人进行定位探测,得到定位验证次数和待确认位置;
8、s5、判断定位验证次数是否超过预设的验证次数,若是则进入s6,否则返回s3;
9、s6、将待确认位置作为水下机器人的位置信息,完成基于rsm的水下机器人定位。
10、本发明的有益效果为:本发明提供的一种基于rsm的水下机器人定位方法,通过水下机器人搭载惯性导航系统,在水下机器人入水探测的同时,开始同步实时持续获取惯性导航参数,并结合水下机器人脐带线缆的放线长度,实现了持续对水下机器人执行水下探测任务期间位置的初步定位,定位精度可达米级,在水下机器人的初步定位范围的基础上,本发明通过获取水下机器人的特征物质组合,利用搭载rsm束波仪的空中无人机采用电磁粒子波进行了二次的精确定位探测,定位精度可达厘米级,本发明通过两次定位的方式,实现了快速准确地探测得到水下机器人的具体位置,提升了探测水下机器人位置信息的效率,保障了水下机器人探测结果的准确性。
11、进一步地,所述s1中惯性导航参数包括水下机器人随水下探测任务执行开始,每个时刻的加速度和角速度。
12、采用上述进一步方案的有益效果为:本发明中从惯性导航参数中获取水下机器人随水下探测任务开始起每个时刻的加速度和角速度,实现了基于加速度确定水下机器人行进速度和行进距离,也实现了基于角速度确定水下机器人的行进方向和位移路径。
13、进一步地,所述s2包括如下步骤:
14、s21、设置水下机器人角速度发生变化时,行进速度为0;
15、s22、根据水下机器人执行水下探测任务时每次角速度的变化时间节点,将水下机器人执行水下探测任务的时间划分为若干探测时间段,并得到水下机器人在各探测时间段的行进方向;
16、s23、将各探测时间段按时间顺序进行排序,得到探测时间段顺序序列;
17、s24、将水下机器人入水行进速度设置为0,并基于探测时间段顺序序列,分别获取水下机器人各探测时间段内每一时刻的加速度,以及开始时刻和结束时刻的行进速度;
18、s25、根据水下机器人的脐带线在每个时刻的放线长度、各探测时间段内的行进方向、每一时刻的加速度,以及开始时刻和结束时刻的加速度和行进速度,得到各探测时间段内水下机器人的水下三维行进轨迹;
19、s26、基于水下机器人的水下三维行进轨迹,得水下机器人的初步定位范围。
20、采用上述进一步方案的有益效果为:本发明提供基于惯性导航参数和放线长度,得到水下机器人的初步定位范围的方法,通过对水下机器人行进方向的变化,将水下机器人水下探测时间划分为了若干探测时间段,并通过水下机器人角速度的变化,得到个探测时间段内水下机器人的行进方向,在明确水下机器人行进方向的基础上,结合水下机器人实时的加速度、行进速度和脐带线缆的放线长度,能够得到水下机器人的行进距离和位移路径,从而得到各探测时间段内水下机器人的水下三维行进轨迹,实现对水下机器人的初步定位,本发明能够随水下机器人入水探测的位置变化,实现持续同步获取水下机器人初步定位范围,为快速执行小范围的二次精确定位节省了探测范围,提升了探测效率。
21、进一步地,所述s1中水下机器人的特征物质组合包括水下机器人的电池样本和机身材料样本。
22、采用上述进一步方案的有益效果为:本发明中通过水下机器人的特征物质组合能够实现获取水下机器人的电磁粒子波参数组,将水下机器人的电池样本和机身材料样本作为特征物质组合,能够有效区别于水中的其他物质,从而实现精确探测到水下机器人。
23、进一步地,所述s3包括如下步骤:
24、s31、获取水下机器人的特征物质组合的电磁粒子波;
25、s32、构建超低温且具有量子阱结构的实验物理场景;
26、s33、在实验物理场景下,对水下机器人的特征物质组合的电磁粒子波所表征的物理量进行测试,形成表征水下机器人的电磁粒子波阈值区间;
27、s34、随机在表征水下机器人的电磁粒子波阈值区间内选择一组电磁粒子波参数值,并将其作为定位探测电磁粒子波参数组。
28、采用上述进一步方案的有益效果为:本发明提供基于水下机器人的特征物质组合,获取定位探测电磁粒子波参数组的方法,在超低温的量子阱实验场景下,对水下机器人的特征物质组合进行电磁粒子波所表征的物理量的测试,得到能够表征水下机器人的电磁粒子波阈值区间,在该电磁粒子波区间中即可获取得到能够对水下机器人进行定位探测的电磁粒子波参数组,基于电磁粒子波的物质探测,能够透过1km以内深度的岩层和数十米深度的水体,精度能够达到厘米级,在初步定位范围的基础上实现两个数量级的精度提升。
29、进一步地,所述s4包括如下步骤:
30、s41、将初步定位范围对应的垂直于地面的空中平面范围作为无人机飞行范围;
31、s42、将将空中无人机驱动到无人机飞行范围内,并保持纵向高度不变;
32、s43、随机选择定位探测电磁粒子波参数组中的一项电磁粒子波参数值,并将每次选中的电磁粒子波参数值作为当前定位探测特征参数值;
33、s44、利用空中无人机搭载的rsm束波仪垂直地面向下发射当前定位探测特征参数值对应的量粒子波,并驱动空中无人机在无人机飞行范围内进行遍历,且持续获取量粒子波对应单位探测区域的回波;
34、s45、判断回波的物理场态是否与量粒子波的物理场态一致,若是则进入s47,否则进入s46;
35、s46、继续空中无人机在无人机飞行范围内进行遍历,直至回波的物理场态与量粒子波的物理场态一致,则进入s47,若遍历结束仍不满足回波的物理场态与量粒子波的物理场态一致,则选择一项电磁粒子波参数组中的其他项电磁粒子波参数值作为当前定位探测特征参数值,并返回s44;
36、s47、将无人机悬空,将回波产生位置作为待确认位置,并依次选择电磁粒子波参数组中的其他项电磁粒子波参数值,将选中的电磁粒子波参数值设置为当前定位探测特征参数值,每设置一次当前定位探测特征参数值,则执行一次s44和s45,统计回波的物理场态与量子波的物理场态一致的次数,作为定位验证次数。
37、采用上述进一步方案的有益效果为:本发明提供利用搭载rsm束波仪的空中无人机在初步定位范围内,基于定位探测电磁粒子波参数组进行二次精确水下无人机定位的方法,通过遍历已缩小探测范围后的初步定位范围,能够极大地提升水下无人机的探测效率,且采用无人机搭载rsm束波仪,只要水深和山体不超过测量范围,则无人机对水下机器人的定位追踪都不受水下机器人姿态和状态的影响,即便水下机器人电池耗尽,无法工作,也能够实现通过两次定位对水下机器人精确定位,从而保障水下机器人探测数据的准确性。
38、进一步地,所述s5中预设的验证次数至少为3次。
39、采用上述进一步方案的有益效果为:本发明中通过将预设的验证次数设置为至少3次,能够有效保证通过rsm束波仪进行电磁粒子波探测的准确性,低于3次的验证符合,可能存在误差,过多次的验证,则会降低定位效率,导致定位资源和成本的浪费。
40、针对于本发明还具有的其他优势将在后续的实施例中进行更细致的分析。
- 还没有人留言评论。精彩留言会获得点赞!