一种基于栅格距离值的场景地图构建方法、装置及智能移动设备与流程
本技术涉及人工智能,特别是涉及一种基于栅格距离值的场景地图构建方法、装置及智能移动设备。
背景技术:
1、智能移动设备是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统,而随着智能移动设备的不断进化,智能移动设备在各个行业的应用越来越普遍,例如,扫地机器人等家居智能移动设备、巡检机器人等工业智能移动设备等。而对于智能移动设备而言,其利用所携带的传感器,对其所在场景进行环境感知,并完成自主定位的能力显得十分重要,而为了实现智能移动设备的自主定位,则需要依靠智能移动设备所在场景的场景地图。
2、基于此,提供一种场景地图生成方式,以生成智能移动设备所在场景的场景地图,显得尤为重要。
技术实现思路
1、本技术实施例的目的在于提供一种基于栅格距离值的场景地图构建方法、装置及智能移动设备,以构建智能移动设备所在场景的场景地图。具体技术方案如下:
2、第一方面,本技术实施例提供了一种基于栅格距离值的场景地图构建方法,所述方法包括:
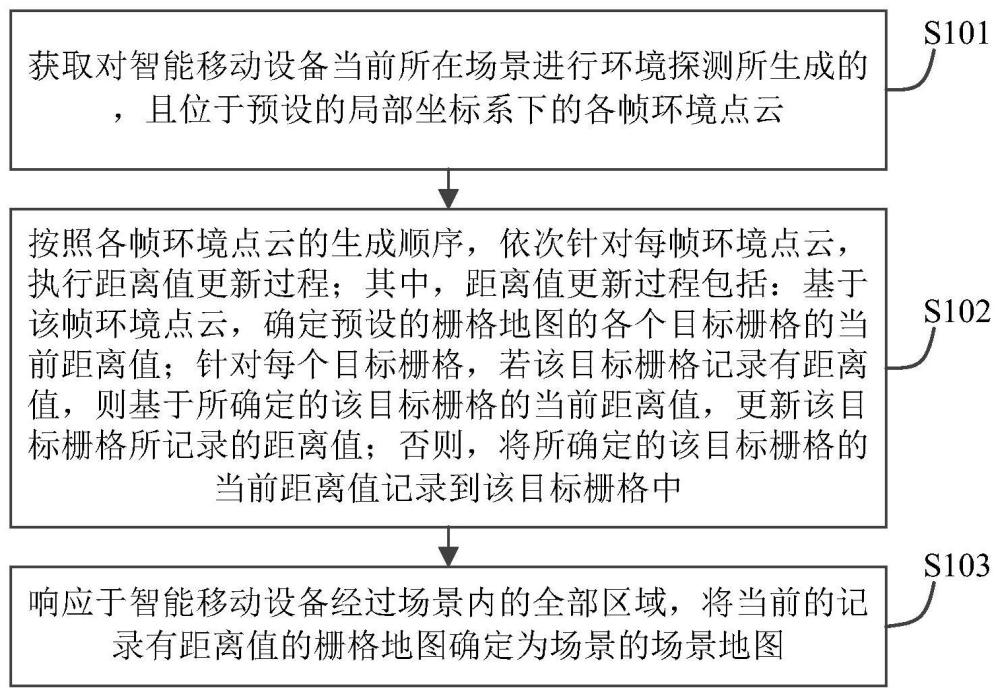
3、获取对智能移动设备当前所在场景进行环境探测所生成的,且位于预设的局部坐标系下的各帧环境点云;
4、按照各帧环境点云的生成顺序,依次针对每帧环境点云,执行距离值更新过程;其中,所述距离值更新过程包括:基于该帧环境点云,确定预设的栅格地图的各个目标栅格的当前距离值;针对每个目标栅格,若该目标栅格记录有距离值,则基于所确定的该目标栅格的当前距离值,更新该目标栅格所记录的距离值;否则,将所确定的该目标栅格的当前距离值记录到该目标栅格中;所述各个目标栅格包括:该帧环境点云对应的各个点在所述栅格地图中分别所属的匹配栅格,以及与任一匹配栅格的位置关系符合相邻条件的相邻栅格;该帧环境点云对应的各个点为:该帧环境点云在预设的全局坐标系下对应的目标全局点云的各个点;
5、响应于所述智能移动设备经过所述场景内的全部区域,将当前的记录有距离值的所述栅格地图确定为所述场景的场景地图。
6、可选的,一种具体实现方式中,所述基于该帧环境点云,确定栅格地图的各个目标栅格的当前距离值,包括:
7、基于该帧环境点云在所述全局坐标系下对应的目标全局位姿,将该帧环境点云转换为所述全局坐标系下的目标全局点云,并确定所述目标全局点云的每个点的法向量;其中,若该帧环境点云为首帧环境点云,则所述目标全局位姿为:所述全局坐标系下的设定位姿;若该帧环境点云为除所述首帧环境点云外的环境点云,则所述目标全局位姿是基于生成该环境点云时,所述智能移动设备在所述全局坐标系下的位姿所确定的;
8、确定所述目标全局点云的各个点在栅格地图中分别所属的栅格,作为各个匹配栅格,并将各个匹配栅格的当前距离值设定为指定数值;
9、针对每个匹配栅格,确定沿该匹配栅格对应的点的法向量方向与该匹配栅格的距离不超过预设距离的栅格,作为相邻栅格,并将所述相邻栅格与距离最近的所述匹配栅格之间的距离值,确定为所述相邻栅格的当前距离值。
10、可选的,一种具体实现方式中,针对除所述首帧环境点云外的每帧环境点云,该帧环境点云在所述全局坐标系下对应的目标全局位姿的确定方式,包括:
11、获取生成该帧环境点云时,所述智能移动设备在所述全局坐标系下的位姿,作为该帧环境点云对应的初始位姿;
12、基于所述初始位姿包括的初始角度以及预设的角度搜索窗口,确定各个候选角度,并基于所述初始位姿包括的初始位置以及预设的位置搜索窗口,确定各个候选位置;
13、基于各个候选角度和各个候选位置,确定各个候选位姿;其中,每个候选位姿包括:一个候选角度和一个候选位置,不同候选位姿包括的候选角度和/或候选位置不同;
14、针对每个候选位姿,基于该候选位姿,将该帧环境点云转换为所述全局坐标系下的初始全局点云,并基于所述初始全局点云,以及所述栅格地图的各个栅格记录的距离值,计算该候选位姿的得分;
15、将得分满足预设要求的候选位姿确定为该帧环境点云在所述全局坐标系下对应的目标全局位姿。
16、可选的,一种具体实现方式中,所述基于所述初始全局点云,以及所述栅格地图的各个栅格记录的距离值,计算该候选位姿的得分,包括:
17、确定所述初始全局点云的各个点在所述栅格地图中分别所属的栅格,作为指定栅格,并确定所述栅格地图的各个栅格所记录的距离值中的最大值;
18、针对每个指定栅格,若该指定栅格记录有距离值,则计算该指定栅格记录的距离值与所述最大值的差值;否则,则计算所述指定数值与所述最大值的差值;
19、计算所得到的全部差值的和值,作为该候选位姿的得分。
20、可选的,一种具体实现方式中,针对除所述首帧环境点云外的每帧环境点云,所述基于所确定的该目标栅格的当前距离值,更新该目标栅格所记录的距离值,包括:
21、基于除所述目标全局位姿外的各个候选位姿的得分,以及所述目标全局位姿,计算所述目标全局位姿的不确定度;
22、基于该目标栅格的法向量和所述不确定度,计算该目标栅格的当前权重;其中,若该目标栅格为所述匹配栅格,则该目标栅格的法向量为:该帧环境点云在预设的全局坐标系下对应的目标全局点云中属于该目标栅格的点的法向量;若该目标栅格为所述相邻栅格,则该目标栅格的法向量为:距离该目标栅格最近的匹配栅格的法向量;
23、利用该目标栅格的当前距离值、该目标栅格的当前权重、该目标栅格记录的距离值,以及该目标栅格记录的权重,计算该目标栅格的新的距离值,并将所述新的距离值记录到该目标栅格中;
24、所述方法还包括:
25、针对所述首帧环境点云,响应于得到该帧环境点云在预设的全局坐标系下对应的目标全局点云,确定各个目标栅格的权重,并将每个目标栅格的权重记录到该目标栅格中;
26、针对除所述首帧环境点云外的每帧环境点云,响应于将所述新的距离值记录到该目标栅格中,利用该目标栅格的当前权重,更新该目标栅格记录的权重。
27、可选的,一种具体实现方式中,所述基于除所述目标全局位姿外的各个候选位姿的得分,以及所述目标全局位姿,计算所述目标全局位姿的不确定度,包括:
28、利用第一公式,计算所述目标全局位姿的不确定度;其中,所述第一公式包括:
29、
30、
31、其中,pi为除所述目标全局位姿外的各个候选位姿中的第i个候选位姿,pbest为所述目标全局位姿,n为除所述目标全局位姿外的各个候选位姿的数量,covx为所述目标全局位姿在x方向上的不确定度,scorepi为所述第i个候选位姿的得分,pix为所述第i个候选位姿的x方向分量,为所述目标全局位姿的x方向分量,covy为所述目标全局位姿在y方向上的不确定度,piy为所述第i个候选位姿的y方向分量,为所述目标全局位姿的y方向分量。
32、可选的,一种具体实现方式中,所述基于该目标栅格的法向量和所述不确定度,计算该目标栅格的当前权重,包括:
33、利用第二公式,计算该目标栅格的当前权重;其中,所述第二公式包括:
34、
35、其中,nj为第j个目标栅格的法向量,w(p)j为所述第j个目标栅格的当前权重,njx为所述第j个目标栅格的法向量的x方向分量,njy为所述第j个目标栅格的法向量的y方向分量。
36、可选的,一种具体实现方式中,所述利用该目标栅格的当前距离值、该目标栅格的当前权重、该目标栅格记录的距离值,以及该目标栅格记录的权重,计算该目标栅格的新的距离值,包括:
37、利用第三公式,计算该目标栅格的新的距离值;其中,所述第三公式包括:
38、
39、其中,为第j个目标栅格的新的距离值,w(p)j为所述第j个目标栅格记录的权重,df(p)j为所述第j个目标栅格记录的距离值,df(p)j为所述第j个目标栅格的当前距离值。
40、第二方面,本技术实施例提供了一种智能移动设备,包括:探测传感器和处理器;
41、所述探测传感器,用于在所述智能移动设备在当前所处场景内移动过程中,对所述场景进行环境探测,生成位于预设的局部坐标系下的各帧环境点云;
42、所述处理器,用于基于所述各帧环境点云,执行上述第一方面提供的任一所述的基于栅格距离值的场景地图构建方法。
43、第三方面,本技术实施例提供了一种基于栅格距离值的场景地图构建装置,所述装置包括:
44、点云获取模块,用于获取对智能移动设备当前所在场景进行环境探测所生成的,且位于预设的局部坐标系下的各帧环境点云;
45、距离值更新模块,用于按照各帧环境点云的生成顺序,依次针对每帧环境点云,执行距离值更新过程;其中,所述距离值更新过程包括:基于该帧环境点云,确定预设的栅格地图的各个目标栅格的当前距离值;针对每个目标栅格,若该目标栅格记录有距离值,则基于所确定的该目标栅格的当前距离值,更新该目标栅格所记录的距离值;否则,将所确定的该目标栅格的当前距离值记录到该目标栅格中;所述各个目标栅格包括:该帧环境点云对应的各个点在所述栅格地图中分别所属的匹配栅格,以及与任一匹配栅格的位置关系符合相邻条件的相邻栅格;该帧环境点云对应的各个点为:该帧环境点云在预设的全局坐标系下对应的目标全局点云的各个点;
46、地图确定模块,用于响应于所述智能移动设备经过所述场景内的全部区域,将当前的记录有距离值的所述栅格地图确定为所述场景的场景地图。
47、第四方面,本技术实施例提供了一种电子设备,包括:
48、存储器,用于存放计算机程序;
49、处理器,用于执行存储器上所存放的程序时,实现上述第一方面提供的任一所述的基于栅格距离值的场景地图构建方法。
50、第五方面,本技术实施例提供了一种计算机可读存储介质,所述计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面提供的任一所述的基于栅格距离值的场景地图构建方法。
51、第六方面,本技术实施例提供了一种包含指令的计算机程序产品,当其在计算机上运行时,使得计算机执行上述第一方面提供的任一所述的基于栅格距离值的场景地图构建方法。
52、本技术实施例有益效果:
53、以上可见,应用本技术实施例提供的方案,为了构建智能移动设备所进入的陌生场景的场景地图,智能移动设备通常搭载有各类探测传感器,例如,激光雷达、图像采集设备等。而在智能移动设备进入该场景后,智能移动设备可以在该场景中移动,在移动过程中,可以基于智能移动设备所搭载的探测传感器对该场景进行环境探测,生成位于预设的局部坐标系下的各帧环境点云,并利用上述各帧环境点云进行该场景的场景地图构建。这样,在构建智能移动设备当前所处场景的场景地图时,可以首先在智能移动设备在该场景内移动过程中,获取对该场景进行环境探测所生成的,且位于上述局部坐标系下的各帧环境点云。进而,便可以按照各帧环境点云的生成顺序,依次针对每帧环境点云,执行距离值更新过程,即按照各帧环境点云的生成顺序,依次利用各帧环境点云,对预设的栅格地图的各个栅格记录的距离值进行更新。其中,对于每帧环境点云而言,上述距离值更新过程包括:首先将该帧环境点云在预设的全局坐标系下对应的目标全局点云的各个点,作为该帧环境点云对应的各个点。之后,将该帧环境点云对应的各个点在上述栅格地图中分别所属的匹配栅格,以及与任一匹配栅格的位置关系符合相邻条件的相邻栅格均确定为目标栅格。然后,基于该帧环境点云,确定上述各个目标栅格的当前距离值。进而,针对每个目标栅格,若该目标栅格记录有距离值,则基于所确定的该目标栅格的当前距离值,更新该目标栅格记录的距离值;若该目标栅格未记录有距离值,则将所确定的该目标栅格的当前距离值,记录到该目标栅格中。在针对每帧环境点云,执行完上述距离值更新时,可以认为完成该帧环境点云对上述栅格地图的更新。最后,响应于智能移动设备移动经过上述场景内的全部区域,将当前的记录有距离值的栅格地图,确定为该场景的场景地图。
54、基于此,应用本技术实施例提供的方案,利用智能移动设备对当前所处场景进行环境探测所生成的位于上述局部坐标系下的各帧环境点云,实现对预设的栅格地图中各个栅格所记录的距离值的逐步更新,完成对该场景的场景地图的构建。并且,该场景地图还可以为后续智能移动设备在该场景中的定位、导航以及执行各类任务等提供基础。
- 还没有人留言评论。精彩留言会获得点赞!