一种闭式风洞试验中悬挂旋成体飞行器的位姿测试方法
本发明涉及旋成体飞行器测试方法,具体涉及一种闭式风洞试验中悬挂旋成体飞行器的位姿测试方法。
背景技术:
1、旋转弹箭在空中飞行时角运动分别呈现为绕弹轴自转、绕速度矢量和绕空间某轴旋转的自旋、进动和章动三种运动形式。在风洞试验中,旋成体飞行器动态气动特性研究的主要手段是通过支撑机构模拟旋成体飞行器的三种角运动及通过天平测量角运动过程中的非定常气动力。因此准确的校准旋成体飞行器的初始位姿,以及测量旋成体飞行器做单一或耦合角运动时的角度变化值变得非常重要,对摸清弹箭进动、章动特性、锥形运动稳定性和动态气动特性等具有重要现实意义。
2、现有的旋成体飞行器风洞试验装置一般采用杆式硬支撑或绳索牵引式软支撑。对于杆式硬支撑,可较容易实现对旋成体飞行器的初始位姿的校准,但这种支撑方式在试验过程中支撑臂容易产生振动导致测量数据失真。绳索牵引式软支撑一般通过绳索牵引系统实现,这种支撑方式对旋成体飞行器的初始位姿的校准较为不便,但支撑系统不会对旋成体飞行器造成较大影响。,现有的旋成体飞行器在风洞试验中通常采用传感器测量位姿变化,这种测量方式较为依赖传感器的精度,并且传感器容易受到外界环境的影响,导致旋成体飞行器模型位姿与动态气动特性测量数据不够准确。
技术实现思路
1、本发明的目的在于克服背景技术中存在的上述缺陷或问题,提供一种闭式风洞试验中悬挂旋成体飞行器的位姿测试方法,其能够改善旋成体飞行器在风洞试验过程中模型位姿测量数据的准确性。
2、为达成上述目的,本发明采用如下技术方案:
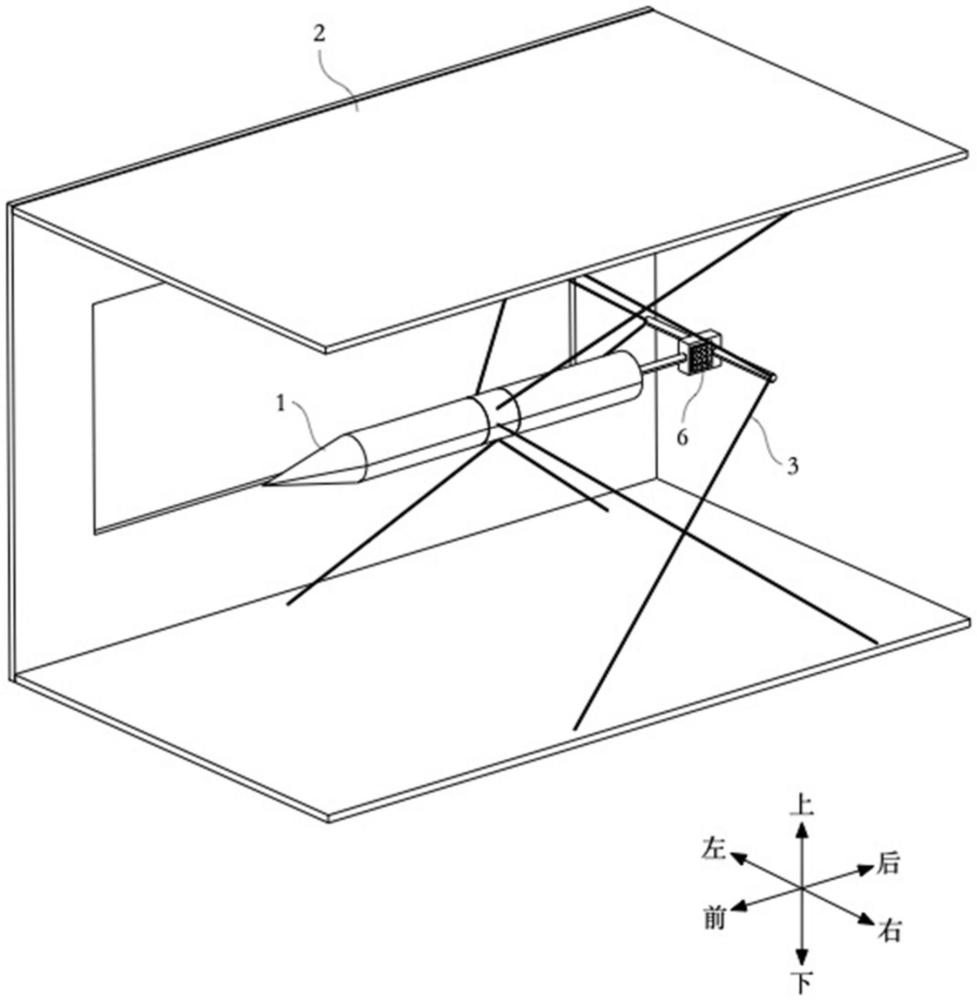
3、技术方案一:一种闭式风洞试验中悬挂旋成体飞行器的位姿测试方法,所述旋成体飞行器通过绳索牵引系统悬挂支撑于闭式风洞的试验段,其包括:校准步骤,在该步骤中,将所述旋成体飞行器校准至零位姿;和测量步骤,在该步骤中,所述旋成体飞行器以零位姿为初始状态进行风洞试验,所述旋成体飞行器尾部固设有标定板,相机以预设帧频拍摄所述标定板,并基于标定板的位姿变化解算获取所述旋成体飞行器的位姿变化数据;所述标定板具有标定面,所述标定面设有以预设方式排布的n个标定点,在所述旋成体飞行器处于零位姿时,所述标定面正对所述相机,且所述标定面上的所有标定点均处于所述相机视野中心。
4、技术方案二,其基于技术方案一:所述零位姿指所述旋成体飞行器的滚转角、俯仰角、偏航角与零度角的偏差小于第一阈值,且其质心在前后方向以及左右方向与预设的基准位置的偏差小于等于第二阈值;在所述校准步骤中,首先对所述旋成体飞行器的滚转角、俯仰角和偏航角进行校准,再对所述旋成体飞行器的质心位置进行校准。
5、技术方案三,其基于技术方案二:在对所述旋成体飞行器的滚转角进行校准时,在旋成体飞行器上固定安装水平承载板,并在水平承载板上沿左右方向放置倾角仪,根据倾角仪显示角度调整绳索牵引系统相关参数,直至所述旋成体飞行器的滚转角与零度角的偏差小于第一阈值。
6、技术方案四,其基于技术方案三:在对所述旋成体飞行器的俯仰角进行校准时,在旋成体飞行器上固定安装水平承载板,并在水平承载板上沿前后方向放置倾角仪,根据倾角仪显示角度调整绳索牵引系统相关参数,直至所述旋成体飞行器的俯仰角与零度角的偏差小于第一阈值。
7、技术方案五,其基于技术方案四:在对所述旋成体飞行器的偏航角进行校准时,在所述旋成体飞行器上确定处于同一高度位置且前后位置不同的第一测量点和第二测量点,并测定第一测量点和第二测量点的距离,之后通过高度游标卡尺测定第一测量点和第二测量点相对闭式风洞的同一侧壁的距离,根据上述距离数据计算获得的偏航角调整绳索牵引系统相关参数,直至所述旋成体飞行器的偏航角与零度角的偏差小于第一阈值。
8、技术方案六,其基于技术方案五:在对所述旋成体飞行器的质心位置进行校准时,根据所述闭式风洞的尺寸确定基准位置,之后通过高度游标卡尺测定旋成体飞行器的质心与闭式风洞的侧壁和底壁的距离,并根据该距离调整绳索牵引系统相关参数,直至所述旋成体飞行器的质心位置在前后方向和左右方向与基准位置的偏差小于第二阈值。
9、技术方案七,其基于技术方案一至六:所述测量步骤中,基于标定板的位姿变化解算获取所述旋成体飞行器的位姿变化数据包括:标定相机内参,获取相机坐标系;标定相机外参,获取世界坐标系与相机坐标系的变换关系;通过相机拍摄的标定板图像,获取弹箭坐标系与相机坐标系的变换关系;将弹箭坐标系转换至世界坐标系,采用旋转矩阵法解算获取所述旋成体飞行器的位姿变化数据。
10、技术方案八,其基于技术方案七:所述测量步骤中,基于标定板的位姿变化解算获取所述旋成体飞行器的位姿变化数据包括:标定相机内参,获取相机坐标系oc-xcyczc;标定相机外参,获取世界坐标系ow-xwywzw和相机坐标系oc-xcyczc的变换关系,以式1表示:通过相机拍摄的标定板图像,获取弹箭坐标系oa-xayaza与相机坐标系oc-xcyczc的变换关系,以式2表示:
11、将弹箭坐标系转换至世界坐标系,以式3表示:(式3);采用旋转矩阵法解算获取所述旋成体飞行器的位姿变化数据,包括:将旋转矩阵与角的关系表示为式4:
12、
13、(式4);通过待定系数法,比对式3和式4中矩阵对应位置数值,并结合式3可得所述旋成体飞行器的位姿变化数据,即式5:
14、pose=[tx ty tz arctan(r5/r8) arctanr2 arctan(-r1/r0)]t(式5);其中,taw=[tx,ty,tz]t为所述旋成体飞行器在前后方向即x轴、上下方向即y轴和左右方向即z轴的位移,为所述旋成体飞行器的滚转角φ、偏航角θ和俯仰角ψ;[r0 r3 r6]t为ow-xw轴在oc-xcyczc坐标系的方向向量;[r1 r4 r7]t为ow-yw轴在oc-xcyczc坐标系的方向向量;[r2 r5 r8]t为ow-zw轴在oc-xcyczc坐标系的方向向量;[tx ty tz]t为ow-xwywzw坐标系原点在oc-xcyczc坐标系中的位置。
15、由上述对本发明的描述可知,相对于现有技术,本发明具有如下有益效果:
16、本发明提供的闭式风洞试验中悬挂旋成体飞行器的位姿测量方法,采用绳索牵引系统悬挂支撑旋成体飞行器,在空间较为狭小的闭式风洞中,可为旋成体飞行器提供较大的动态位姿试验空间,以此为基础,开展旋成体飞行器位姿的校准和测量工作;首先通过校准步骤对旋成体飞行器的位姿进行校准,使旋成体飞行器能够处于进行试验和测量的零位姿,之后开始进行风洞试验,旋成体飞行器位姿受绳索牵引系统驱动按照期望位姿进行运动,此时,通过相机对旋成体飞行器上的标定板按照预设的帧频进行拍摄,通过对标定板的位姿进行解算,即可获知旋成体飞行器的位姿变化,为达到此目的,在标定板上设置有若干个标定点,该些标定点按照预设的方式进行排布,同时具有足够的数量,在标定板出现位姿变化的时候,相机拍摄得到的标定板上的标定点在图像中的位置也会相应的发生变化,通过标定点在图像中的位置变化,以及相关坐标系之间的转换关系,即可对应地获取旋成体飞行器在空间中的位姿变化;并且,由于标定板固连在旋成体飞行器尾部,标定板坐标系与弹箭坐标系重合(坐标系原点之间三维位置关系已知),通过标定板位姿可反推旋成体飞行器的位姿变化,因此相机只需拍摄弹箭尾部标定板,相对于在旋成体飞行器弹身上布置标定点解算位姿的方法,尾部固连标定板的方法中标定点相对集中,通过相机能够拍摄到更大的弹箭位姿变化范围,为上述“较大动态位姿试验工作空间”提供了更多的位姿测量数据;另外使用标定板解算位姿,可大幅减少计算量,提高解算效率。同时,气动力与姿态角有着紧密的关系,位姿静态校准后,可以减小实际姿态角与零位姿的误差,位姿动态测量过程中,视觉测量提高了测量精度,通过本发明提供的测试方法,能够提高和改善测量旋成体飞行器位姿与动态气动特性数据的准确性。
- 还没有人留言评论。精彩留言会获得点赞!