一种用于汽车车身检测的定位控制方法及系统
本发明涉及汽车车身检测定位控制,特别涉及一种用于汽车车身检测的定位控制方法及系统。
背景技术:
1、汽车出厂前,为保证车身质量,需要进行车身检测。随着自动化技术的不断发展,目前对汽车进行车身检测多是由机器人进行执行完成。但是,机器人多是被设置固定的对汽车进行车身检测的控制程序,即机器人只能按照固定检测步骤对汽车进行车身检测,当机器人检测出车身异常时,只能进行输出报警,无法针对检测出的车身异常进行深度检测,然而,深度检测的工作多是由接收到报警的工作人员执行完成,人力成本较大,降低了汽车车身检测的全面性与检测效率。
2、因此,亟需一种解决办法。
技术实现思路
1、本发明目的之一在于提供了一种用于汽车车身检测的定位控制方法,监听机器人群体在第一时间段内自主对汽车进行初步车身检测时定位的关键点位分布,基于关键点位分布、机器人群体的个体位置分布以及汽车的三维模型图,决策深度检测方案,基于深度检测方案,在第二时间段内控制机器人群体对汽车进行深度车身检测,机器人可以针对检测出的车身异常进行深度检测,无需工作人员人工完成,降低了人力成本,提升了汽车车身检测的全面性与检测效率。
2、本发明实施例提供的一种用于汽车车身检测的定位控制方法,包括:
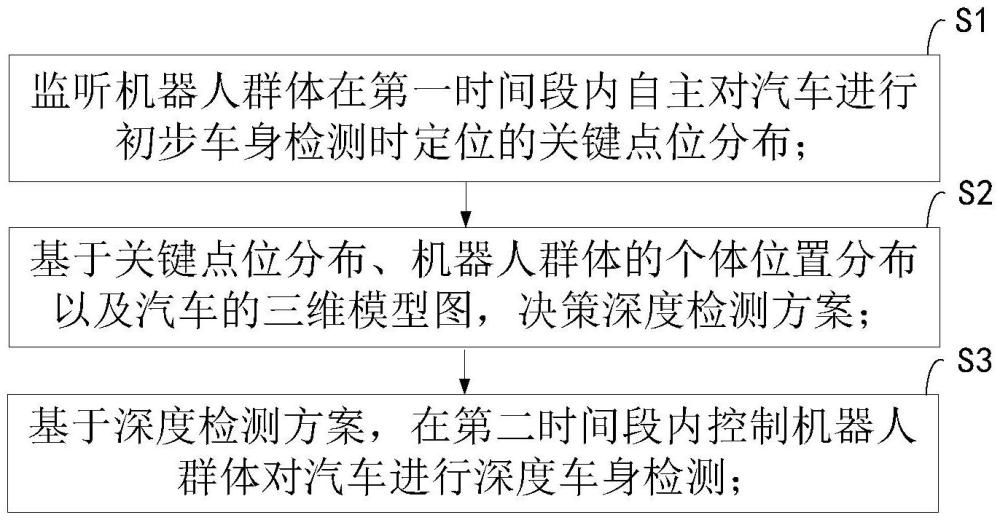
3、监听机器人群体在第一时间段内自主对汽车进行初步车身检测时定位的关键点位分布;
4、基于关键点位分布、机器人群体的个体位置分布以及汽车的三维模型图,决策深度检测方案;
5、基于深度检测方案,在第二时间段内控制机器人群体对汽车进行深度车身检测;
6、其中,第二时间段在第一时间段之后且与第一时间段相邻。
7、优选的,所述基于关键点位分布、机器人群体的个体位置分布以及汽车的三维模型图,决策深度检测方案,包括:
8、基于点位簇划分条件,从关键点位分布中划分出多个点位簇;
9、依次遍历各个点位簇;
10、每次遍历时,对遍历到的点位簇进行特征化处理,获得第一特征化向量;
11、从检测知识库中确定第一特征化向量对应的检测知识;
12、基于检测知识,确定区域搜索规则与检测约束条件;
13、基于区域搜索规则,在三维模型图上搜索出待检区域的区域位置分布,并与检测约束条件进行关联;
14、遍历各个点位簇结束后,基于检测姿态路线规划体系,根据区域位置分布与个体位置分布,规划检测姿态路线;
15、基于检测姿态路线与区域位置分布关联的检测约束条件,生成深度检测方案。
16、优选的,所述点位簇划分条件包括:
17、同一点位簇至少包含关键点位分布中的两个关键点位;
18、且/或,
19、同一点位簇中的各个关键点位两两之间具备标准点位关系;
20、且/或,
21、同一点位簇中的各个关键点位在三维模型图中对应的多模态信息与标准多模态信息之间的匹配度大于等于匹配度阈值。
22、优选的,用于汽车车身检测的定位控制方法,还包括:
23、当机器人群体中的目标机器人检测到车身异常事件时,解析车身异常事件的严重度;
24、当严重度大于等于严重度阈值时,将车身异常事件对应的在线专家接入目标机器人的检测视角;
25、基于深度检测方案,确定目标机器人在未来预设的时间长度内的安全停驻空间;
26、基于车身异常事件对应的视角规划模板,根据安全停驻空间,规划多个观察视角;
27、基于各个观察视角,生成观察视角列表;
28、向在线专家显示观察视角列表;
29、当在线专家从观察视角列表中选择观察视角时,控制目标机器人移动使得在线专家接入选择的观察视角。
30、优选的,用于汽车车身检测的定位控制方法,还包括:
31、基于视角筛选条件,从各个观察视角中筛选出目标观察视角;
32、对目标观察视角下的可视画面进行特征化处理,获得第二特征化向量;
33、从检测意向库中确定第二特征化向量对应的检测意向;
34、基于检测意向,对深度检测方案进行修正;
35、基于修正后的深度检测方案,在第二时间段内接力控制机器人群体对汽车进行深度车身检测;
36、其中,视角筛选条件包括:
37、在线专家选择目标观察视角的历史总次数大于等于次数阈值;
38、且/或,
39、目标观察视角的历史视角保持总时长大于等于第一时长阈值;
40、且/或,
41、在线专家在第三时间段、第四时间段内均选择过目标观察视角且在第三时间段与第四时间段之间的第五时间段内选择其他观察视角后的视角保持时长小于等于第二时长阈值;第四事件段在第三时间段之后。
42、本发明实施例提供的一种用于汽车车身检测的定位控制系统,包括:
43、监听模块,用于监听机器人群体在第一时间段内自主对汽车进行初步车身检测时定位的关键点位分布;
44、决策模块,用于基于关键点位分布、机器人群体的个体位置分布以及汽车的三维模型图,决策深度检测方案;
45、检测模块,用于基于深度检测方案,在第二时间段内控制机器人群体对汽车进行深度车身检测;
46、其中,第二时间段在第一时间段之后且与第一时间段相邻。
47、优选的,所述决策模块基于关键点位分布、机器人群体的个体位置分布以及汽车的三维模型图,决策深度检测方案,包括:
48、基于点位簇划分条件,从关键点位分布中划分出多个点位簇;
49、依次遍历各个点位簇;
50、每次遍历时,对遍历到的点位簇进行特征化处理,获得第一特征化向量;
51、从检测知识库中确定第一特征化向量对应的检测知识;
52、基于检测知识,确定区域搜索规则与检测约束条件;
53、基于区域搜索规则,在三维模型图上搜索出待检区域的区域位置分布,并与检测约束条件进行关联;
54、遍历各个点位簇结束后,基于检测姿态路线规划体系,根据区域位置分布与个体位置分布,规划检测姿态路线;
55、基于检测姿态路线与区域位置分布关联的检测约束条件,生成深度检测方案。
56、优选的,所述点位簇划分条件包括:
57、同一点位簇至少包含关键点位分布中的两个关键点位;
58、且/或,
59、同一点位簇中的各个关键点位两两之间具备标准点位关系;
60、且/或,
61、同一点位簇中的各个关键点位在三维模型图中对应的多模态信息与标准多模态信息之间的匹配度大于等于匹配度阈值。
62、优选的,用于汽车车身检测的定位控制系统,还包括:
63、交互模块,用于:
64、当机器人群体中的目标机器人检测到车身异常事件时,解析车身异常事件的严重度;
65、当严重度大于等于严重度阈值时,将车身异常事件对应的在线专家接入目标机器人的检测视角;
66、基于深度检测方案,确定目标机器人在未来预设的时间长度内的安全停驻空间;
67、基于车身异常事件对应的视角规划模板,根据安全停驻空间,规划多个观察视角;
68、基于各个观察视角,生成观察视角列表;
69、向在线专家显示观察视角列表;
70、当在线专家从观察视角列表中选择观察视角时,控制目标机器人移动使得在线专家接入选择的观察视角。
71、优选的,用于汽车车身检测的定位控制系统,还包括:
72、修正模块,用于:
73、基于视角筛选条件,从各个观察视角中筛选出目标观察视角;
74、对目标观察视角下的可视画面进行特征化处理,获得第二特征化向量;
75、从检测意向库中确定第二特征化向量对应的检测意向;
76、基于检测意向,对深度检测方案进行修正;
77、基于修正后的深度检测方案,在第二时间段内接力控制机器人群体对汽车进行深度车身检测;
78、其中,视角筛选条件包括:
79、在线专家选择目标观察视角的历史总次数大于等于次数阈值;
80、且/或,
81、目标观察视角的历史视角保持总时长大于等于第一时长阈值;
82、且/或,
83、在线专家在第三时间段、第四时间段内均选择过目标观察视角且在第三时间段与第四时间段之间的第五时间段内选择其他观察视角后的视角保持时长小于等于第二时长阈值;第四事件段在第三时间段之后。
84、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
85、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!