基于混合现实技术的塔杆桩位定位方法及相关设备与流程
本发明属于桩位仪定位,具体涉及基于混合现实技术的塔杆桩位定位方法及相关设备。
背景技术:
1、随着配电线路的快速发展和智能化需求的提升,对配电线路中线路桩位的测量精度和可靠性提出了更高要求。现有的桩位是通过桩位仪进行定位,常规的桩位仪是采用基于磁场测量和信号处理的算法进行定位,主要依赖于对磁场强度、方向等参数的测量,基于获取的数据进行分析来确定桩位的位置。然而,磁场测量本身受到多种因素的影响,这些因素可能导致磁场测量数据的不准确,从而影响定位算法的精度,例如:周围的电磁设备或地下管道产生的磁场会干扰桩位仪的测量,使得测量结果与实际桩位位置存在偏差。此外,因建筑工程现场往往存在各种不确定因素,如天气变化、施工扰动等,这些因素会导致磁场测量数据的波动和异常,进而导致定位结果的不稳定和偏差,也即是基于磁场数据的定位算法对环境变化和异常情况的适应性不强,会导致鲁棒性差的问题。
2、综上所述,现有的桩位仪在定位过程中因基于磁场数据进行定位,而磁场受环境干扰,测量稳定性低,基于磁场数据的定位算法对环境变化和异常情况的适应性不强,会导致线路桩位测量精度不高和鲁棒性差的问题。
技术实现思路
1、本发明的目的是针对现有技术中桩位仪在定位过程中因基于磁场数据进行定位,而磁场受环境干扰,测量稳定性低,基于磁场数据的定位算法对环境变化和异常情况的适应性不强,会导致线路桩位测量精度不高和鲁棒性差的问题,提出基于混合现实技术的塔杆桩位定位方法及相关设备,方法通过利用多类型的传感器分别采集图像数据、imu数据及gnss数据,并基于时间戳对图像数据、imu数据及gnss数据进行时间同步,能够降低时间不同步产生的误差,提高数据的准确率;通过构建vio定位模型,基于vio定位模型对时间同步后的图像数据及imu数据进行数据融合以确定第一定位,不仅利用了视觉采集的高精度及鲁棒性强的特点,并且通过imu数据对基于图像数据所确定的位置漂移进行修正补偿,更有利于保持良好的环境适应能力,提高第一定位的准确性;通过利用gnss数据的全局无漂移性对第一定位进行修正补偿,适应能力强,能够在各种场景下实现高精度的定位,得到更准确的目标桩位。
2、第一方面,本发明提供的一种技术方案是:基于混合现实技术的塔杆桩位定位方法,包括以下步骤:
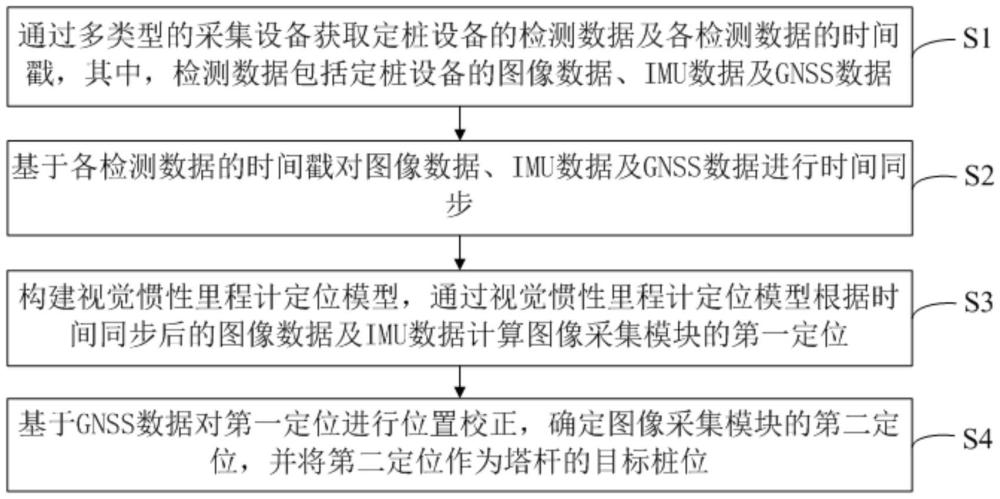
3、通过多类型的采集设备获取定桩设备的检测数据及各所述检测数据的时间戳,其中,所述检测数据包括所述定桩设备的图像数据、imu数据及gnss数据;
4、基于各所述检测数据的时间戳对所述图像数据、imu数据及gnss数据进行时间同步;
5、构建视觉惯性里程计定位模型,通过所述视觉惯性里程计定位模型根据时间同步后的所述图像数据及所述imu数据计算图像采集模块的第一定位;
6、基于所述gnss数据对所述第一定位进行位置校正,确定所述图像采集模块的第二定位,并将所述第二定位作为塔杆的目标桩位。
7、进一步地,所述采集设备包括图像采集模块、imu模块及gnss模块,所述通过多类型的采集设备获取定桩设备的检测数据及各所述检测数据的时间戳,包括:
8、通过所述图像采集模块采集所述定桩设备的图像数据并记录采集图像数据的时间戳;
9、通过所述imu模块采集所述定桩设备的imu数据并记录采集imu数据的时间戳;
10、通过所述gnss模块采集所述定桩设备的gnss数据并记录采集所述gnss数据的时间戳。
11、进一步地,在所述通过多类型的采集设备获取定桩设备的检测数据及各所述检测数据的时间戳的步骤之后,所述方法还包括:
12、对所述定桩设备中的所述图像采集模块、imu模块及gnss模块分别进行标定,获取所述图像采集模块、imu模块及gnss模块的标定参数。
13、进一步地,所述对所述定桩设备中的所述图像采集模块、imu模块及gnss模块分别进行标定,获取所述图像采集模块、imu模块及gnss模块的标定参数,包括:
14、基于所述图像采集模块的样本图像进行特征点提取,将提取的特征点与所述样本图像的三维坐标点进行匹配,根据匹配结果计算所述图像采集模块的标定参数,所述图像采集模块的标定参数包括内参矩阵及外参矩阵;
15、基于所述imu模块的imu样本数据进行静态标定及动态标定,得到所述imu模块的标定参数,所述imu模块的标定参数包括尺度因子和偏移参数;
16、基于所述gnss模块的gnss样本数据,通过误差模型进行误差分析,根据误差分析结果计算所述gnss模块的标定参数,所述gnss模块的标定参数包括多项误差参数。
17、进一步地,所述基于各所述检测数据的时间戳对所述图像数据、imu数据及gnss数据进行时间同步,包括:
18、从所述图像数据、imu数据及gnss数据的时间戳中选取基准时间戳;
19、基于时间戳对齐算法,将其他所述时间戳与所述基准时间戳进行对齐,控制所述图像数据、imu数据及gnss数据时间同步。
20、进一步地,所述构建视觉惯性里程计定位模型,通过所述视觉惯性里程计定位模型根据时间同步后的所述图像数据及所述imu数据计算图像采集模块的第一定位,包括:
21、基于图像训练样本及imu训练样本构建所述视觉惯性里程计定位模型;
22、通过所述视觉惯性里程计定位模型的特征提取算法提取所述图像数据的关键特征,根据所述关键特征进行特征点匹配,得到各所述关键特征的匹配关系;
23、基于各所述关键特征的匹配关系进行运动估计,获取所述图像采集模块的运动信息,并基于所述运动信息计算所述图像采集模块的第一相对位移;
24、基于所述imu数据进行预积分,获取所述imu模块的第二相对位移;
25、将所述第二相对位移对所述第一相对位移进行漂移补偿,得到所述图像采集模块的第一定位。
26、进一步地,所述imu数据包括所述imu模块的加速度与角速度,所述基于所述imu数据进行预积分,包括:
27、对所述加速度进行预积分,获取所述imu模块的旋转角;
28、对所述加速度进行积分运行,获取所述imu模块的位置变化数据;
29、根据所述imu模块的姿态变化数据和位置变化数据确定所述第二相对位移。
30、进一步地,所述gnss数据包括所述定桩设备的卫星定位数据,所述基于所述gnss数据对所述第一定位进行位置校正,确定所述图像采集模块的第二定位,并将所述第二定位作为塔杆的目标桩位,包括:
31、基于所述卫星定位数据和所述第一定位,通过误差估计算法确定所述图像采集模块的定位误差;
32、基于所述定位误差对所述第一定位进行差值补偿,得到所述第二定位,并将所述第二定位作为塔杆的目标桩位。
33、第二方面,本发明还提供一种技术方案是:基于混合现实技术的塔杆桩位定位装置,包括:
34、数据采集模块,用于通过多类型的采集设备获取定桩设备的检测数据及各所述检测数据的时间戳,其中,所述检测数据包括所述定桩设备的图像数据、imu数据及gnss数据;
35、时间同步模块,用于基于各所述检测数据的时间戳对所述图像数据、imu数据及gnss数据进行时间同步;
36、位置计算模块,用于构建视觉惯性里程计定位模型,通过所述视觉惯性里程计定位模型根据时间同步后的所述图像数据及所述imu数据计算图像采集模块的第一定位;
37、位置校正模块,用于基于所述gnss数据对所述第一定位进行位置校正,确定所述图像采集模块的第二定位,并将所述第二定位作为塔杆的目标桩位。
38、第三方面,本发明还提供一种技术方案是:一种电子设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现第一方面中所述的基于混合现实技术的塔杆桩位定位方法的步骤。
39、本发明所达到的有益效果:本发明提供的基于混合现实技术的塔杆桩位定位方法,通过利用多类型的传感器分别采集图像数据、imu数据及gnss数据,并基于时间戳对图像数据、imu数据及gnss数据进行时间同步,能够降低时间不同步产生的误差,提高数据的准确率;通过构建vio定位模型,基于vio定位模型对时间同步后的图像数据及imu数据进行数据融合以确定第一定位,不仅利用了视觉采集的高精度及鲁棒性强的特点,并且通过imu数据对基于图像数据所确定的位置漂移进行修正补偿,更有利于保持良好的环境适应能力,提高第一定位的准确性;通过利用gnss数据的全局无漂移性对第一定位进行修正补偿,适应能力强,能够在各种场景下实现高精度的定位,得到更准确的目标桩位。
40、上述
技术实现要素:
仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
- 还没有人留言评论。精彩留言会获得点赞!