一种基于旋翼式无人机的地面目标定位方法及装置与流程
本技术属于目标跟踪,特别涉及一种基于旋翼式无人机的地面目标定位方法及装置。
背景技术:
1、随着近几十年无人机技术的发展,在现代战争中无人机发挥着越来越重要的作用,无人机成本低廉,利用无人机可快速获取敌方有价值的地面目标的精确目标并实施打击,或将目标精确位置发送给军事打击群,一举歼灭敌方高价值目标与有生力量。在军事、物流、反恐、资源勘探、生物保护、森林草原巡查与消防等领域广泛存在着对地面目标精确定位的需求,对于地面移动的目标还存在轨迹记录与测速的需求。
2、现有狭义上的航空无人机一共分为两大类:旋翼式无人机与固定翼式无人机,这两种无人机各种其优缺点和适用场合。对于旋翼式无人机,其操纵灵活,易于培训,上下前后左右六个方向可以快速的根据需要变换空间位置,可以对目标实现无死角的侦查,而且旋翼式无人机的起降对飞行场地的要求很低,可以到空间干扰物复杂的区域执行任务(如楼房密集的城市、树林、工厂等);但其存在续航时间短、航程短、实用升限低、飞行速度较慢、有效载荷携带量少等固有的缺点,一般只能在起飞点10公里以内的区域活动。对于固定翼式无人机,其实用升限高、飞行速度快、续航时间长(一般在10小时以上)、可携带有效载荷量多、可代替有人飞机实施远程打击任务等优点;但其存在操作相对没有旋翼式无人机灵活、不能前往复杂空间区域执行任务、对起降场地要求较高、一般需要辅助设备、培训较为复杂等缺点。旋翼式无人机与固定翼式无人机的优缺点和适用场景基本互补,可以组成低空前线战场信息获取与高空远程打击的组合。
3、距离侦查目标越近,实时定位精度越高,旋翼式无人机由于其低空操纵性好,可稳定悬停获取地面信息,非常适用于地面目标的精确定位。现有的无人机地面目标定位方法有:无人机自身姿态与位置信息结合激光测距组合解算的方法、目标区域地形匹配定位方法、结合目标区域高清卫星图像的图像识别定位方法、多基站辅助定位方法等。以上提到的若干地面目标定位方法存在如下的不足:
4、(1)需要携带的机载设备多。在激光测距解算位置的方法中,需要集成激光测距模块,会降低无人机的续航和缩短航程,此外也需要解决摄像模块与激光测距模块数据融合与协同等问题。
5、(2)图像识别定位方法和地形匹配定位方法需要较为强大的算力,会影响无人机的续航,此外也需要提前做好目标标记,不太适用于对动态目标的实时定位。对于双目视觉定位而言,其定位的有效距离短,定位精度低。
6、(3)对于需要基站辅助的定位方法,需要额外的设备,成本较高。
7、为了满足旋翼式无人机等低小慢航空飞行器对地面目标的实时定位与测速,提出了一种地面目标定位与测速方法,不需要复杂的机身设备和其他复杂的辅助设备即可实现对地面目标较为精确的定位与测速。
技术实现思路
1、为了解决上述技术问题至少之一,本技术提供了一种基于旋翼式无人机的地面目标定位方法及装置,以实现对地面目标的定位与测速。
2、本技术第一方面提供了一种基于旋翼式无人机的地面目标定位方法,主要包括:
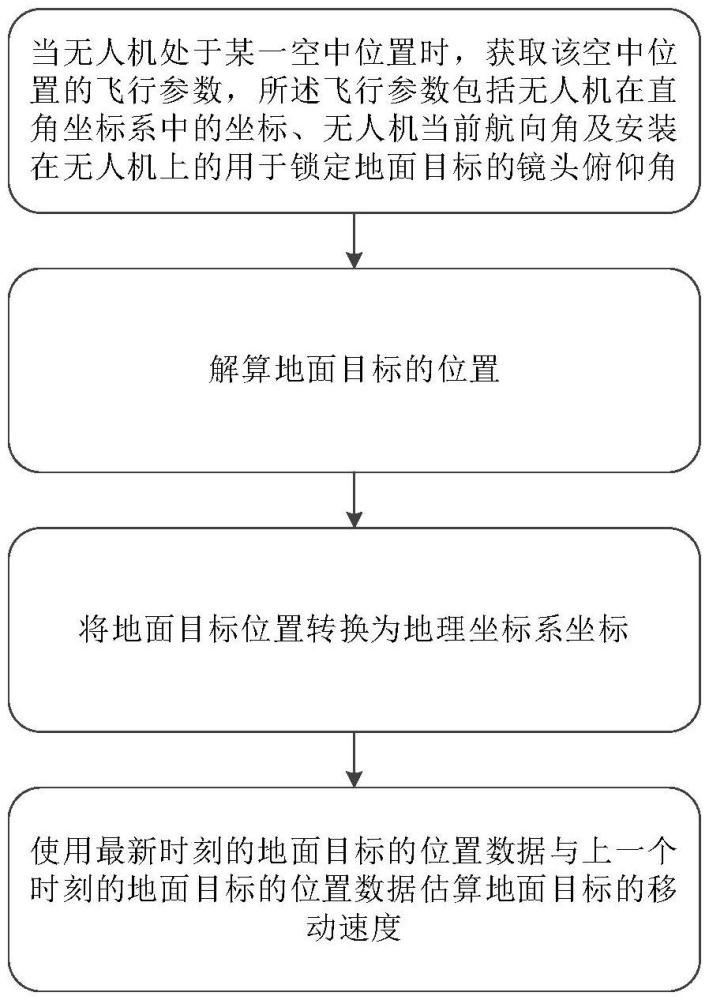
3、步骤s1、当无人机处于某一空中位置时,获取该空中位置的飞行参数,所述飞行参数包括无人机在直角坐标系中的坐标(x0,y0,z0)、无人机当前航向角α及安装在无人机上的用于锁定地面目标的镜头俯仰角θ,所述直角坐标系以无人机起飞点为原点,东向为x轴,北向为y轴,竖直向上为z轴;
4、步骤s2、基于以下公式解算地面目标的位置(x,y,z):
5、
6、z=z*;
7、其中,z*为地面目标的高度,当地面目标的高度与无人机起飞点高度一致时,地面目标的高度z*为0,否则,通过至少两个空中位置的飞行参数构建关于地面目标横坐标和/或纵坐标的方程,以解算地面目标的高度z*。
8、优选的是,步骤s1进一步包括通过以下方式获取至少两个空中位置的飞行参数:
9、通过单架无人机飞至两个或多个空中位置,以获得不同空中位置的飞行参数,和/或
10、通过两架或多架位于不同空中位置的无人机,以获得不同空中位置的飞行参数。
11、优选的是,步骤s2进一步包括:
12、步骤s21、当通过两个空中位置的飞行参数构建关于地面目标横坐标和纵坐标的方程以解算地面目标的高度z*时,将基于地面目标横坐标方程解算的地面目标的高度与基于地面目标纵坐标方程解算的地面目标的高度求平均值作为最终的地面目标的高度z*,然后基于最终的地面目标的高度z*计算出两个空中位置对应的地面目标的横坐标,并求平均值作为最终的地面目标的横坐标,同时,基于最终的地面目标的高度z*计算出两个空中位置对应的地面目标的纵坐标,并求平均值作为最终的地面目标的纵坐标;
13、步骤s22、当通过多个空中位置飞行参数构建关于地面目标横坐标和纵坐标的方程以解算地面目标的高度z*时,对任意两个空中位置按照步骤s21的方式计算地面目标的位置后,通过计算平均值求取最终的地面目标位置。
14、优选的是,步骤s2之后进一步包括:
15、步骤s3、通过以下公式将地面目标位置转换为地理坐标系坐标:
16、
17、ho=hs+z;
18、其中,jo、wo、ho分别为地面目标在地理坐标系下的经度、维度及海拔高度;js、ws、hs分别为无人机起飞点的经度、维度及海拔高度;w为空中位置处的维度、re为地球半径。
19、优选的是,步骤s2之后进一步包括:
20、步骤s4、使用最新时刻的地面目标的位置数据与上一个时刻的地面目标的位置数据估算地面目标的移动速度。
21、本技术第二方面提供了一种基于旋翼式无人机的地面目标定位装置,主要包括:
22、飞行参数获取模块,用于当无人机处于某一空中位置时,获取该空中位置的飞行参数,所述飞行参数包括无人机在直角坐标系中的坐标(x0,y0,z0)、无人机当前航向角α及安装在无人机上的用于锁定地面目标的镜头俯仰角θ,所述直角坐标系以无人机起飞点为原点,东向为x轴,北向为y轴,竖直向上为z轴;
23、地面目标位置解算模块,用于基于以下公式解算地面目标的位置(x,y,z):
24、
25、z=z*;
26、其中,z*为地面目标的高度,当地面目标的高度与无人机起飞点高度一致时,地面目标的高度z*为0,否则,通过至少两个空中位置的飞行参数构建关于地面目标横坐标和/或纵坐标的方程,以解算地面目标的高度z*。
27、优选的是,通过以下方式获取至少两个空中位置的飞行参数:
28、通过单架无人机飞至两个或多个空中位置,以获得不同空中位置的飞行参数,和/或
29、通过两架或多架位于不同空中位置的无人机,以获得不同空中位置的飞行参数。
30、优选的是,所述地面目标位置解算模块包括:
31、双空中位置解算地面目标位置单元,用于当通过两个空中位置的飞行参数构建关于地面目标横坐标和纵坐标的方程以解算地面目标的高度z*时,将基于地面目标横坐标方程解算的地面目标的高度与基于地面目标纵坐标方程解算的地面目标的高度求平均值作为最终的地面目标的高度z*,然后基于最终的地面目标的高度z*计算出两个空中位置对应的地面目标的横坐标,并求平均值作为最终的地面目标的横坐标,同时,基于最8·终的地面目标的高度z*计算出两个空中位置对应的地面目标的纵坐标,并求平均值作为最终的地面目标的纵坐标;
32、多空中位置解算地面目标位置单元,用于当通过多个空中位置飞行参数构建关于地面目标横坐标和纵坐标的方程以解算地面目标的高度z*时,对任意两个空中位置调用所述双空中位置解算地面目标位置单元计算地面目标的位置后,通过计算平均值求取最终的地面目标位置。
33、优选的是,所述地面目标定位装置还包括:
34、地理坐标系转换模块,用于通过以下公式将地面目标位置转换为地理坐标系坐标:
35、
36、ho=hs+z;
37、其中,jo、wo、ho分别为地面目标在地理坐标系下的经度、维度及海拔高度;js、ws、hs分别为无人机起飞点的经度、维度及海拔高度;w为空中位置处的维度、re为地球半径。
38、优选的是,所述地面目标定位装置还包括:
39、地面目标移动速度计算模块,用于使用最新时刻的地面目标的位置数据与上一个时刻的地面目标的位置数据估算地面目标的移动速度。
40、本技术能够实现对地面目标的快速精准定位,所要求的平台机载设备少,对无人机续航影响较小,易于操纵,计算量小,抗干扰能力强。
- 还没有人留言评论。精彩留言会获得点赞!