密闭容器的气密性检测方法、装置及系统与流程
本发明涉及工业视觉检测,尤其涉及一种密闭容器的气密性检测方法、装置及系统。
背景技术:
1、气密性检测技术,例如气密性水检技术,目前广泛用于金属内胆等密闭容器的气密检测,该过程中,通过向密闭容器充入一定高压的气体并被压入水中,再通过人工或者机器视觉观测水中是否有气泡产生,以对密闭容器是否漏气进行判定。
2、一般将水槽的整个侧壁改成透明的钢化玻璃,便于人工或者相机从水槽外部进行成像观测。由于密闭容器在入水过程中,其表面一般会附着一些小气泡,再加上密闭容器的材质本身具有反光等光学特性,采用人眼观测或者常规的图像识别,容易造成漏气的误检或漏检。
技术实现思路
1、本发明提供一种密闭容器的气密性检测方法、装置及系统,用以解决现有技术中水密性检测存在的误检或漏检缺陷,实现高精度的密闭容器的气密性检测。
2、本发明提供一种密闭容器的气密性检测方法,包括如下步骤:
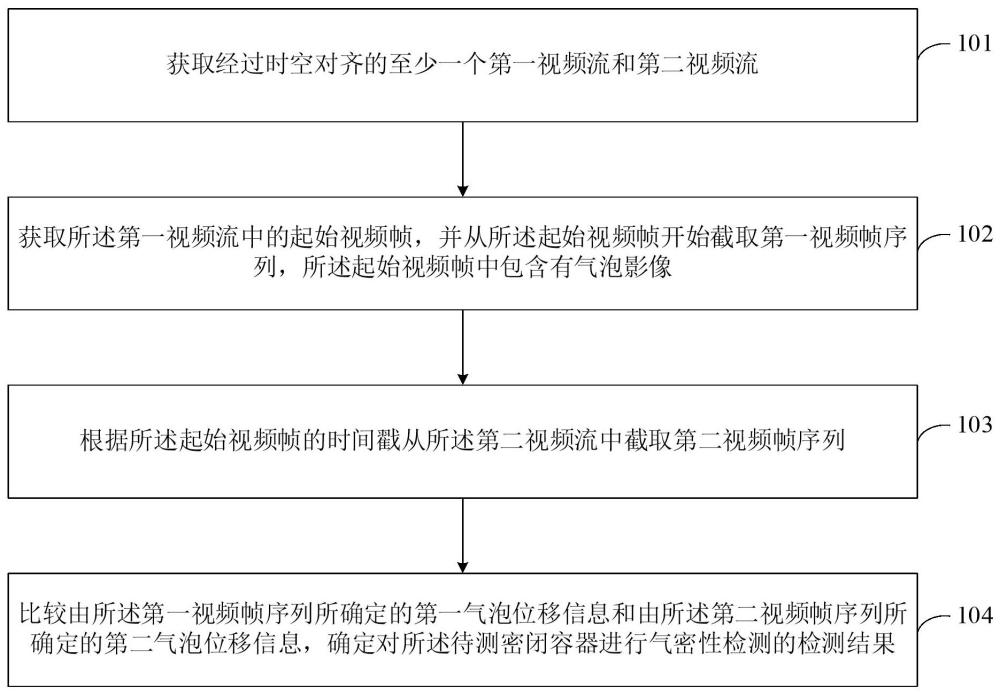
3、获取经过时空对齐的至少一个第一视频流和第二视频流,所述第一视频流是对置于槽体中的待测密闭容器进行拍摄获得的,所述第二视频流是对所述槽体中位于所述待测密闭容器的上部空间进行拍摄获得的;所述槽体内装载有液体,所述液体浸没所述待测密闭容器;
4、获取所述第一视频流中的起始视频帧,并从所述起始视频帧开始截取第一视频帧序列,所述起始视频帧中包含有气泡影像;
5、根据所述起始视频帧的时间戳从所述第二视频流中截取第二视频帧序列;
6、比较由所述第一视频帧序列所确定的第一气泡位移信息和由所述第二视频帧序列所确定的第二气泡位移信息,确定对所述待测密闭容器进行气密性检测的检测结果。
7、根据本发明提供的一种密闭容器的气密性检测方法,由所述第一视频帧序列确定所述第一气泡位移信息,具体包括:
8、将所述第一视频帧序列输入至视频分类模型,获取由所述视频分类模型的输出结果;
9、所述输出结果包括是否识别到动态气泡以及所述动态气泡的所述第一气泡位移信息;所述第一气泡位移信息用于指示所述动态气泡的运行轨迹;
10、所述视频分类模型是以3d cnn为初始模型进行训练后得到的。
11、根据本发明提供的一种密闭容器的气密性检测方法,所述获取所述第一视频流中的起始视频帧,包括:
12、按照预设采样频率从所述第一视频流中提取出待测视频帧;
13、依次将所述待测视频帧输入至目标识别模型,获取所述目标识别模型输出的检测结果;
14、在确定任一检测结果为有气泡影像的情况下,获取与所述任一检测结果对应的待测视频帧作为所述起始视频帧;
15、所述目标识别模型是利用多个视频帧样本以及与每个视频帧样本对应的检测结果标签进行训练后得到的。
16、根据本发明提供的一种密闭容器的气密性检测方法,由所述第二视频帧序列确定所述第二气泡位移信息,具体包括:
17、对所述第二视频帧序列中的每一视频帧进行气泡影像检测,筛选出包含气泡影像的所有目标视频帧,并在每个目标视频帧中标注出所述气泡影像相关的感兴趣区域;
18、针对任一感兴趣区域,将所述感兴趣区域划分为多个图像网格,并遍历计算相邻两帧目标视频帧中对应的图像网格之间的位移信息,以确定所述任一感兴趣区域的速度场;
19、获取所有所述感兴趣区域的速度场,以确定所述第二气泡位移信息;所述第二气泡位移信息用于指示所述动态气泡的运行轨迹。
20、根据本发明提供的一种密闭容器的气密性检测方法,在根据所述起始视频帧的时间戳从所述第二视频流中截取第二视频帧序列之前,还包括:
21、对所述第二视频流进行图像灰度化处理。
22、根据本发明提供的一种密闭容器的气密性检测方法,在将所述感兴趣区域划分为多个图像网格之前,对所述感兴趣区域进行归一化,具体包括:
23、计算所述感兴趣区域内每个像素点的灰度值,用于计算出平均灰度强度;
24、计算每个像素点的灰度值与所述平均灰度强度的差值平方和,以根据所述差值平方和与像素点总数,确定归一化因子;
25、根据每个像素点的灰度值与所述平均灰度强度的差值与所述归一化因子之间的关系,确定每个像素点的归一化像素值。
26、根据本发明提供的一种密闭容器的气密性检测方法,所述比较由所述第一视频帧序列所确定的第一气泡位移信息和由所述第二视频帧序列所确定的第二气泡位移信息,确定对所述待测密闭容器进行气密性检测的检测结果,具体包括:
27、根据所述第一气泡位移信息确定至少一个第一运行轨迹,以及根据所述第二气泡位移信息确定至少一个第二运行轨迹;
28、若确定至少有一个所述第一运行轨迹与任一所述第二运行轨迹为同一动态气泡的运行轨迹,则确定所述检测结果为不合格;
29、否则,确定所述检测结果为合格。
30、根据本发明提供的一种密闭容器的气密性检测方法,在获取所述第二视频流之后,还包括:
31、抽取所述第二视频流中的至少一帧视频帧作为液体品质检测图像;
32、获取所述液体品质检测图像的图像亮度;
33、若确定所述图像亮度小于预设亮度阈值,则发送清洁指令给窗口清洁装置;
34、所述清洁指令用于驱动所述窗口清洁装置对所述槽体的拍摄窗口进行清洁;
35、所述预设亮度阈值为水质检测样本图像的图像亮度,所述水质检测样本图像是预先对清洁状态下的所述槽体进行拍摄后得到的。
36、本发明还提供一种密闭容器的气密性检测装置,包括:
37、视频获取单元,用于获取经过时空对齐的至少一个第一视频流和第二视频流,所述第一视频流是对置于槽体中的待测密闭容器进行拍摄获得的,所述第二视频流是对所述槽体中位于所述待测密闭容器的上部空间进行拍摄获得的;所述槽体内装载有液体,所述液体浸没所述待测密闭容器;
38、视频预处理单元,用于获取所述第一视频流中的起始视频帧,并从所述起始视频帧开始截取第一视频帧序列,所述起始视频帧中包含有气泡影像;以及,根据所述起始视频帧的时间戳从所述第二视频流中截取第二视频帧序列;
39、检测运算单元,用于比较由所述第一视频帧序列所确定的第一气泡位移信息和由所述第二视频帧序列所确定的第二气泡位移信息,确定对所述待测密闭容器进行气密性检测的检测结果。
40、本发明还提供一种密闭容器的气密性检测系统,包括:槽体、至少两台相机和处理器;所述槽体内装载有液体,所述液体浸没待测密闭容器;
41、在所述槽体的至少一个侧壁开设有透明视窗,所述相机通过所述透明视窗分别拍摄第一视频流和第二视频流,所述第一视频流是对置于槽体中的待测密闭容器进行拍摄获得的,所述第二视频流是对所述槽体中位于所述待测密闭容器的上部空间进行拍摄获得的;
42、所述相机与所述处理器通信连接,以将所述第一视频流和所述第二视频流同步传送至所述处理器;
43、所述处理器在运行时,执行上述任意一种密闭容器的气密性检测方法。
44、根据本发明提供的密闭容器的气密性检测系统,所述透明视窗的数量为一个,且为矩形视窗;所述矩形视窗的尺寸是基于以下方式确定的:
45、根据相机镜头距离所述矩形视窗之间的第一距离、相机镜头距离所述槽体中的所述待测密闭容器之间的第二距离和所述待测密闭容器的宽度,确定所述矩形视窗的宽度;
46、根据所述第一距离、所述第二距离和所述待测密闭容器的宽度,确定所述矩形视窗的长度。
47、根据本发明提供的密闭容器的气密性检测系统,所述透明视窗的数量为两个,第一透明视窗位于第二透明视窗的下方;
48、所述第一透明视窗供第一相机采集所述第一视频流;
49、所述第二透明视窗供第二相机采集所述第二视频流。
50、根据本发明提供的密闭容器的气密性检测系统,所述透明视窗的数量为多个,且所述相机的数量也为多个,其中至少有一个透明视窗供其中一个相机采集所述第二视频流;
51、其余多个透明视窗的数量,是根据相机的有效感光区域的长宽比与所述待测密闭容器的长宽比所确定的相机像素利用率决定的。
52、根据本发明提供的密闭容器的气密性检测系统,在所述透明视窗的外部增设有加强筋;
53、所述加强筋的布设方式是基于所述透明视窗的中心点最大挠度确定的。
54、根据本发明提供的密闭容器的气密性检测系统,还包括:确定所述待测密闭容器的上部空间进行拍摄的拍摄区间;设置所述拍摄区间的背景,所述背景与所述气泡之间存在视觉反差。
55、根据本发明提供的密闭容器的气密性检测系统,还包括窗口清洁装置;所述窗口清洁装置运行时,用于清扫所述透明视窗。
56、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述密闭容器的气密性检测方法。
57、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述密闭容器的气密性检测方法。
58、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述密闭容器的气密性检测方法。
59、本发明提供的密闭容器的气密性检测方法、装置及系统,提出的协同气泡轨迹追踪,能有效减少水中悬浮颗粒、密闭容器表面附着气泡等干扰所引起的误报、漏报,提高气密性检测的精准性。
- 还没有人留言评论。精彩留言会获得点赞!