一种用于地质灾害识别的激光雷达检测方法及系统与流程
本发明涉及地质灾害监测,具体是涉及一种用于地质灾害识别的激光雷达检测方法及系统。
背景技术:
1、随着技术的发展,遥感技术、无人机摄影以及激光雷达技术都被运用在地质灾害的防治工作中,其中,激光雷达通过发射和接收激光脉冲生成高精度的三维点云数据,能够有效地扫描地貌。通过数据预处理、分类、生成数字高程模型和提取地形特征,为地质灾害的分析预测提供了支持。
2、在现有的激光雷达地质灾害监测技术中,在应对一些复杂地形时,通常会利用无人机搭载激光雷达进行扫描,后续所有的地质分析识别都是基于获取的点云数据来进行的,因此点云数据的准确性十分重要。
3、实际情况中,激光雷达生成的点云特点为“近密远疏”,即远距离的地貌特征会出现不具体的情况,而无人机在复杂地形上方作业时出于安全性考虑会在一定的高度进行,这就导致各个区域与激光雷达的距离是不统一的,尤其是在地形高度差较大的区域,这就导致某些区域的点云不够完整,通过后期处理提高点云质量又会出现偏离实际的问题,因此,提出了一种用于地质灾害识别的激光雷达检测方法及系统,旨在解决上述的问题。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种用于地质灾害识别的激光雷达检测方法及系统,以解决上述背景技术中存在的问题。
2、本发明是这样实现的,一种用于地质灾害识别的激光雷达检测方法,所述方法包括以下步骤:
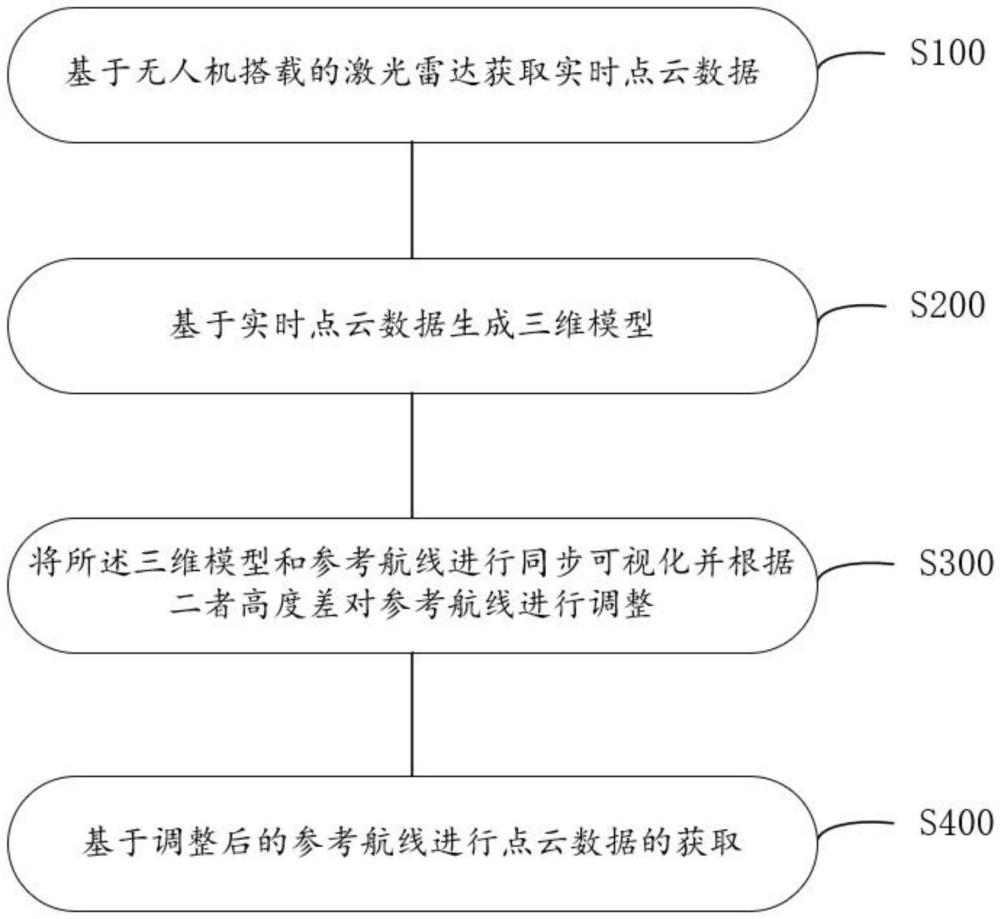
3、基于无人机搭载的激光雷达获取实时点云数据,所述无人机根据设定的参考航线飞行;
4、基于实时点云数据生成三维模型;
5、将所述三维模型和参考航线进行同步可视化并根据二者高度差对参考航线进行调整;
6、基于调整后的参考航线进行点云数据的获取。
7、作为本发明进一步的方案:所述基于实时点云数据生成三维模型的步骤,具体包括:
8、将获取到的实时点云数据进行预处理;
9、基于预处理后的实时点云数据进行点云分类,用于区分点云中包含的地面点以及非地面点;
10、将实时点云数据进行网格化生成三维模型,并进行模型优化。
11、作为本发明进一步的方案:所述将获取到的实时点云数据进行预处理的步骤,具体包括:
12、计算实时点云数据中每个点与邻域内点的距离分布,用于移出偏离的点;
13、基于ndt算法将点云进行对齐;
14、通过旋转和平移将点云调整对齐至同一个坐标系中;
15、当实时点云数据来自多个传感器时,将所述实时点云数据合并成一个点云,并对重复点和重叠区域进行筛除。
16、作为本发明进一步的方案:将所述三维模型和参考航线进行同步可视化并根据二者高度差对参考航线进行调整的步骤,具体包括:
17、基于所述三维模型以及参考航线进行同步性的可视化处理;
18、参照无人机的位置数据、参考航线的航向以及取样范围标准将三维模型划分为近部取样区域和远部待测区域,所述取样范围标准为三维模型中按照参考航线的方向选取设定跨度的模型数据,所述设定跨度根据无人机的位置、点云的密度以及无人机的高度标准得到;
19、基于远部待测区域的三维模型和与其对应的参考航线的区间得到高度差分布集;
20、根据高度差分布集对区间内的参考航线进行高度调整。
21、作为本发明进一步的方案:所述基于远部待测区域的三维模型和与其对应的参考航线的区间得到高度差分布集的步骤,具体包括:
22、根据远部待测区域的三维模型对参考航线进行截取;
23、将截取的参考航线投影至远部待测区域的三维模型中得到引导线,所述引导线沿远部待测区域的地形轮廓分布;
24、选取引导线中的拐点并在截取的参考航线中选取对应的参考点;
25、计算各个拐点与对应参考点之间的高度差得到高度差分布集。
26、作为本发明进一步的方案:所述根据高度差分布集对区间内的参考航线进行高度调整的步骤,具体包括:
27、根据所述无人机的高度标准对高度差分布集进行筛选得到异常数据,所述异常数据为高度差分布集中大于无人机的高度标准的高度差数据;
28、计算所述高度差数据与无人机的高度标准的差值得到差值分布集;
29、根据所述差值分布集对区间内的参考航向对应位置的高度进行调整,使得无人机在参考航线调整后对应的位置获取的点云数据密度大于原有的途径所获取的点云数据密度。
30、本发明的另一目的在于提供一种用于地质灾害识别的激光雷达检测系统,所述系统包括:
31、实时点云获取模块,基于无人机搭载的激光雷达获取实时点云数据,所述无人机根据设定的参考航线飞行;
32、点云建模模块,基于实时点云数据生成三维模型;
33、分析模块,用于将所述三维模型和参考航线进行同步可视化并根据二者高度差对参考航线进行调整;
34、点云数据收集模块,基于调整后的参考航线进行点云数据的获取。
35、作为本发明进一步的方案:所述点云建模模块包括:
36、数据预处理单元,用于将获取到的实时点云数据进行预处理;
37、点云分类单元,基于预处理后的实时点云数据进行点云分类,用于区分点云中包含的地面点以及非地面点;
38、模型生成优化单元,用于将实时点云数据进行网格化生成三维模型,并进行模型优化。
39、作为本发明进一步的方案:所述分析模块包括:
40、可视化单元,基于所述三维模型以及参考航线进行同步性的可视化处理;
41、模型划分单元,用于参照无人机的位置数据、参考航线的航向以及取样范围标准将三维模型划分为近部取样区域和远部待测区域,所述取样范围标准为三维模型中按照参考航线的方向选取设定跨度的模型数据,所述设定跨度根据无人机的位置、点云的密度以及无人机的高度标准得到;
42、高度差分析单元,基于远部待测区域的三维模型和与其对应的参考航线的区间得到高度差分布集;
43、航线调整单元,用于根据高度差分布集对区间内的参考航线进行高度调整。
44、作为本发明进一步的方案:所述高度差分析单元包括:
45、航线截取子单元,用于根据远部待测区域的三维模型对参考航线进行截取;
46、航线处理子单元,用于将截取的参考航线投影至远部待测区域的三维模型中得到引导线,所述引导线沿远部待测区域的地形轮廓分布;
47、点选取子单元,用于选取引导线中的拐点并在截取的参考航线中选取对应的参考点;
48、点计算统计子单元,用于计算各个拐点与对应参考点之间的高度差得到高度差分布集。
49、与现有技术相比,本发明的有益效果是:
50、本发明通过无人机搭载激光雷达来对地质地貌进行扫描,利用获取的点云数据来建立地质地貌的三维模型,从而便于对地质灾害进行识别分析,出于飞行安全的考虑,无人机会按照设定的参考航线在一定的高度飞行,因为实际的地形都是起伏变化的,这就导致距离无人机较远的区域点云数据收集不全,这部分区域只会显示大概的地形,本发明特点在于,通过这些点云可以预先生成地形的三维模型,然后通过三维模型去预分析无人机与其的高度差,然后对无人机的参考航线在高度上进行调整,基于获取的实时点云数据能够对后续的航线进行规划调整,这种方式确保获取的点云的质量,进而能够有助于地形地貌的模型生成,更是有利于后续的地质灾害识别处理。
- 还没有人留言评论。精彩留言会获得点赞!