异常判定装置、信号特征量预测器、异常判定方法、学习模型的生成方法以及学习模型与流程
1.本发明涉及对动力传递设备的异常的有无进行判定的异常判定装置、信号特征量预测器、异常判定方法、学习模型的生成方法以及学习模型。
背景技术:
2.作为对链条、减速机、执行器等的动力传递设备的异常进行检测的方法,较多采用以下方法:在检测对象安装加速度传感器、温度传感器等,基于从这些传感器得到的信息,与预先设定的一个或者多个阈值进行比较来判定是否异常(专利文献1等)。
3.在先技术文献
4.专利文献
5.专利文献1:日本特开2018
‑
059576号公报
技术实现要素:
6.本发明要解决的技术问题
7.动力传递装置根据装置是否停止或者是否加速中或者是否低速运转中等运转状态、此时的转数、载重等条件,从传感器得到的物理量应该是变动的。因此,基于将得到的信息、例如测定值与预先设定的阈值进行比较来判定是否是异常的简单的方法的检测异常并不容易。
8.本发明鉴于上述情况而作出,其目的在于,提供一种能够根据运转条件来精度优良地判定有无异常的异常判定装置、信号特征量预测器、异常判定方法、学习模型的生成方法以及学习模型。
9.用于解决问题的技术方案
10.本公开所涉及的异常判定装置具备:输入部,其第1信号以及第2信号,所述第1信号是针对对象的动力传递设备的运转而从第1传感器输出的信号,所述第2信号是来自为了检测所述动力传递设备的异常而安装的第2传感器的信号;运转条件确定部,其基于所述第1信号来确定所述动力传递设备的运转条件;特征量预测部,其根据由所述运转条件确定部确定的运转条件,预测针对正常状态的所述动力传递设备从所述第2传感器输出的第2信号的特征量;以及判定部,其基于如下两者来判定有无异常,其一是根据在判定对象期间基于所述第1信号来确定的所述动力传递设备的运转条件而由所述特征量预测部预测的第2信号的特征量,其二是在所述判定对象期间由所述输入部输入的第2信号的特征量。
11.本公开所涉及的信号特征量预测器具备:输入部,其输入对象的动力传递设备的运转条件;以及输出部,其根据从所述输入部输入的运转条件,预测并且输出针对正常状态的所述动力传递设备从为了检测该设备的异常而安装的传感器输出的信号的特征量。
12.本公开所涉及的异常判定方法包含如下处理:输入针对对象的动力传递设备的运转而从第1传感器输出的第1信号、以及来自为了检测所述动力传递设备的异常而安装的第
2传感器的第2信号;基于所述第1信号来确定所述动力传递设备的运转条件;根据确定出的运转条件来预测针对正常状态的所述动力传递设备从所述第2传感器输出的第2信号的特征量,基于根据在判定对象期间基于所述第1信号而确定的所述动力传递设备的运转条件来预测的第2信号的特征量、以及在所述判定对象期间输入的第2信号的特征量,判定有无异常。
13.本公开所涉及的学习模型的生成方法包含如下处理:使用具备输入层、输出层、以及中间层的学习模型,其中,所述输入层输入异常判定对象的动力传递设备的运转条件,所述输出层输出从为了检测所述动力传递设备的异常而安装的传感器输出的信号的特征量;确定正常状态下的所述动力传递设备的运转条件;导出与该运转条件对应的从所述传感器输出的信号的特征量;以及基于通过将确定出的所述运转条件赋予给所述学习模型的输入层而从所述输出层输出的特征量、与导出的特征量的误差,学习所述中间层中的参数。
14.本公开所涉及的学习模型的生成方法包含如下处理:存储有具备输入层、输出层、以及中间层的特征量预测模型,其中,所述输入层针对异常判定对象的动力传递设备的运转而输入运转条件,所述输出层输出从为了检测所述动力传递设备的异常而安装的传感器输出的信号的特征量,所述中间层将正常状态的所述动力传递设备的已知的运转条件、以及针对正常状态的所述动力传递设备从所述传感器输出的信号的特征量作为教师数据而完成学习;接收判定对象期间中的所述动力传递设备的运转条件、在所述判定对象期间针对所述动力传递设备从所述传感器输出的信号;以及根据包含接收到的运转条件以及对应的信号在内的教师数据,对所述特征量预测模型进行再学习。
15.本公开所涉及的学习模型具备:输入层,其针对异常判定对象的动力传递设备的运转而输入运转条件;输出层,其输出从为了检测所述动力传递设备的异常而安装的传感器输出的信号的特征量;以及中间层,其将正常状态的所述动力传递设备的已知的运转条件、以及针对正常状态的所述动力传递设备从所述传感器输出的信号的特征量作为教师数据而完成学习,所述习模型使计算机发挥功能以使得对如下两者进行比较,其一是通过将在判定对象期间确定的所述动力传递设备的运转条件赋予给所述输入层而从所述输出层输出的、预测为针对正常状态下的动力传递设备从所述传感器输出的信号的特征量,其二是在所述判定对象期间针对所述动力传递设备从所述传感器实际输出的信号的特征量。
16.在本公开的异常判定装置中,关于预测为在正常状态的期间从第2传感器输出的信号的特征量,通过能够根据第1传感器确定的运转条件来进行预测,其中,所述第2传感器是为了针对动力传递设备的运转检测异常而安装的传感器。根据运转条件,从第2传感器输出的信号的特征变动,但能够通过预测来预测与变动相应的特征量。实际从第2传感器输出的信号的特征量、根据运转条件而预测的信号的特征量被比较,在出现与正常状态(通常的状态)不同的特征量的情况下判定为异常。相比于单纯将从第2传感器输出的信号的振幅值或者频率等的数值与预先设定的阈值相比较的情况,能够精度优良地判定。
17.特征量预测部也可以作为预测器来利用,该预测器在输入了运转条件的情况下输出预测的信号的特征量。
18.特征量预测部也可以通过学习模型而实现,该学习模型输入运转条件并输出信号的特征量。学习模型的学习算法优选是回归分析、深度学习等具有教师的学习。学习模型将与已知的运转条件组合的来自第2传感器的信号的特征量作为教师数据而学习。
19.针对运转条件,也可以通过学习模型而确定,该学习模型在输入了来自第1传感器的信号的情况下输出运转条件,其中,所述第1传感器对与动力传递设备的运转条件相关的物理量进行测定。不需要设置用于确定运转条件的特别的编码器、传感器等。
20.从第2传感器输出的信号根据动力传递设备的动作状况而不同,但通过使用根据动作状况而不同的模型来预测特征量从而精度提高。
21.动作状况的判别也可以通过学习模型来确定,该学习模型在输入了来自第1传感器的信号的情况下输出运转状况,其中,所述第1传感器对与动力传递设备的运转状况相关的物理量进行测定。不需要为了确定运转状况而获取来自控制动力传递设备的控制装置的信息。
22.发明效果
23.根据本公开的异常判定装置、信号特征量预测器、异常判定方法、学习模型的生成方法以及学习模型,能够精度优良地判定有无异常。
附图说明
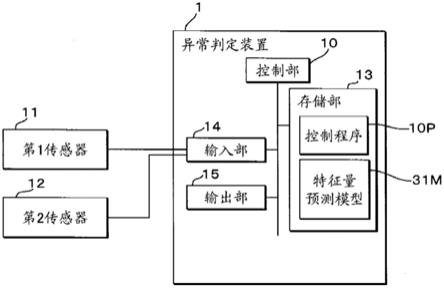
24.图1是表示实施方式1中的异常判定装置的结构的框图。
25.图2是表示特征量预测模型的生成方法顺序的一个例子的流程图。
26.图3是表示基于控制部的异常判定处理顺序的一个例子的流程图。
27.图4是表示特征量预测模型的内容例的图。
28.图5是表示实施方式3中的异常判定装置的结构的框图。
29.图6是表示实施方式3中的运转条件学习模型的创建处理顺序的一个例子的流程图。
30.图7是表示运转条件学习模型的内容例的图。
31.图8是表示使用了运转条件学习模型的异常判定处理顺序的一个例子的流程图。
32.图9是表示实施方式4中的异常判定装置的结构的框图。
33.图10是表示来自第2传感器的信号的波形的一个例子的图。
34.图11是表示特征量预测模型的生成方法的另一个例子的流程图。
35.图12是表示基于实施方式4中的控制部的异常判定处理顺序的一个例子的流程图。
36.图13是表示实施方式5中的异常判定装置的结构的框图。
37.图14是表示来自第1传感器的信号的波形的一个例子的图。
38.图15是表示实施方式5中的运转状况判别模型的创建处理顺序的一个例子的流程图。
39.图16是表示运转状况判别模型的内容例的图。
40.图17是表示实施方式5中的异常判定处理顺序的一个例子的流程图。
41.图18是表示包含实施方式6中的异常判定装置的系统的结构的框图。
具体实施方式
42.参照表示其实施方式的附图来具体说明本发明。
43.(实施方式1)
44.图1是表示实施方式1中的异常判定装置1的结构的框图。异常判定装置1连接于用于对异常的判定对象的动力传递设备中的运转条件进行检测的第1传感器11、以及用于对该设备的异常进行检测的第2传感器12。异常判定装置1具备控制部10、存储部13、输入部14以及输出部15。
45.第1传感器11根据动力传递设备的种类而不同。第1传感器11是对驱动电力传递设备的电机的电流值进行检测的电流计、以及对电压值进行检测的电压计、功率计。也可以是这些当中的任意一个。根据电流值、电压值或者功率值,能够确定动力传递设备的速度、转速(旋转速度)、施加于动力传递设备的负载(载重、重量)等。第1传感器11也可以是加速度传感器。
46.第2传感器12根据动力传递设备的种类而不同。第2传感器12也可以是安装于动力传递设备的加速度传感器,根据振动的大小或者频率等来检测异常。第2传感器12可以是安装于动力传递设备的温度传感器,根据温度来检测异常。在温度传感器的情况下,也可以对动力传递设备的表面温度、环境温度进行测定并根据温度差来检测异常。另外,第2传感器12也可以使用声音传感器、或者对润滑油的浊度等进行检测的传感器、磁场传感器。
47.控制部10包含cpu(central processing unit,中央处理单元)或者gpu(graphical processing unit,图形处理单元)、内置的rom(read only memory,只读存储器)或者ram(random access memory,随机存取存储器)的存储器、时钟等,对异常判定装置1的结构部进行控制。控制部10基于内置的rom或者存储部13中存储的控制程序10p,执行后述的判定处理。
48.存储部13使用闪存存储器等的非易失性存储介质,可重写地存储从控制部10写入的信息、或者控制部10读取的信息。存储部13除了控制程序10p,还存储后述的特征量预测模型31m、控制部10参照的设定信息。
49.输入部14是分别输入从第1传感器11以及第2传感器12输出的信号的接口。输入部14也可以包含a/d转换功能,根据从第1传感器11以及第2传感器12得到的信号来读取测定值并向控制部10输出。
50.输出部15对由控制部10实施的异常的判定结果进行输出。输出部15也可以通过光或者声音的输出来输出异常的判定结果。输出部15也可以经由串行通信等的通信线来与判定对象的动力传递设备、以及包含其的机械装置的控制装置连接,向该控制装置通知异常的判定结果。
51.实施方式1中的异常判定装置1使用特征量预测模型31m。异常判定装置1使用特征量预测模型31m,根据运转条件来预测正常时从第2传感器12输出的信号的特征量,将实际从第2传感器12输出的信号的特征量与预测为正常时输出的特征量相比较来判定是否异常。
52.对特征量预测模型31m的生成方法进行说明。图2是表示特征量预测模型31m的生成方法顺序的一个例子的流程图。实施方式1的特征量预测模型31m的学习算法是基于回归分析的学习。以下的处理针对已知正常并且稳定状态(向固定方向运转中)的电力传递设备、例如检查结束的新品的电力传递设备而被执行。
53.控制部10确定动力传递设备的运转条件(步骤s101)。所谓运转条件,是指动力传递设备的速度、转速、负载等。在步骤s101中,控制部10可以根据从第1传感器11得到的电压
值等的平均值来推断运转条件,也可以从设置于动力传递设备的速度传感器、加速度传感器、编码器等得到运转条件。
54.控制部10从输入部14获取针对步骤s101中确定出的运转条件下的动力传递设备而从第2传感器12输出的信号(步骤s102),通过信号处理来计算信号的特征量(步骤s103)。
55.控制部10根据步骤s101中确定出的运转条件、步骤s103中计算出的特征量来创建教师数据(步骤s104),执行根据创建了的教师数据而对以运转条件为变量来导出特征量的函数进行学习的学习处理(步骤s105)。控制部10通过步骤s105的学习处理来结束一次采样定时(sampling timing)的学习。
56.在步骤s105中,具体来讲,控制部10对规定运转条件所对应的说明变量与应求取的特征量之间的函数以及确定系数进行学习。可以根据运转条件以及特征量来适当设定简单回归、多元回归、支持向量回归或者高斯过程回归等。控制部10在步骤s105中,例如学习作为运转条件而以转速以及载重为变量、将从加速度传感器即第2传感器12实际输出的振动的有效值rms(root mean square)求取作为特征量的线性回归式f(转速,载重)。控制部10例如将线性回归式设为式(1)那样,通过基于教师数据的回归学习来求取系数a0、a1、a2。
57.有效值rms=f(转速,载重)=a0+a1*转速+a2*载重...(1)
58.通过反复执行图2的流程图所示的学习处理,可得到特征量预测模型31m,该特征量预测模型31m输出根据运转状况而在正常的情况下针对电力传递设备而从第2传感器12输出的信号的特征量。特征量预测模型31m被存储于存储部13,在后述的异常判定处理中被利用。
59.图3是表示基于控制部10的异常判定处理顺序的一个例子的流程图。若判定对象的动力传递设备开始运用,则控制部10基于控制程序10p而在稳定状态(向固定方向运转中)下的任意的时机执行以下的处理。
60.控制部10确定动力传递设备的运转条件(步骤s201)。步骤s201中的控制部10的处理与图2的流程图所示的步骤s101的处理相同。
61.控制部10将步骤s201中确定出的运转条件赋予给完成学习的特征量预测模型31m(步骤s202),由此确定通过特征量预测模型31m而得到的信号的特征量(步骤s203)。步骤s203中,具体来讲,控制部10利用使用了通过学习而得到的确定系数的回归式来计算有效值rms。
62.控制部10在步骤s201中从第1传感器11得到信息的时机所对应的时机,通过输入部14来获取从第2传感器12输出的信号(步骤s204),对该信号进行信号处理,计算特征量(步骤s205)。若是图3的例子,则在步骤s205中,控制部10计算从作为加速度传感器的第2传感器12得到的振动的有效值。
63.控制部10判断步骤s203中确定出的特征量与步骤s205中计算出的特征量是否在规定的范围内一致(步骤s206)。在步骤s206中,控制部10鉴于有效值的测定误差来判断即可。
64.在步骤s206中判断为一致的情况下(s206:是),控制部10针对判定对象的动力传递设备判定为正常(步骤s207),结束处理。
65.在步骤s206中判断为不一致的情况下(s206:否),控制部10针对判定对象的动力传递设备判定为异常(步骤s208),从输出部15输出异常(步骤s209),结束处理。
66.控制部10针对存储部13中存储的完成学习的特征量预测模型31m,判定为正常的情况下,也可以使用步骤s204中获取的信号来执行图2的流程图所示的处理顺序,使动力传递设备被使用的环境反映于特征量预测模型31m来提高精度。
67.由此,能够在不使用对转速、载重本身进行测定的编码器等的情况下,根据运转条件来精度优良地判定基于第2传感器12中作为结果而检测的信息的异常的有无。
68.动力传递设备例如是链条,尤其是一般工业用链条、电缆导管(cable guide)、汽车用定时链条(timing chain)。在链条的情况下,作为第1传感器11,使用对移动链条的电机的电流值进行测定的电流计、功率计,作为第2传感器12,使用轴承箱或者链轮中安装的加速度传感器或者温度传感器。针对电缆导管,也可以使用位移传感器。在这些情况下,为了确定运转条件而将链条的链数、链轮的齿数、链条的列数等存储于存储部13而使用即可。在电缆导管的情况下将全长存储于存储部13即可。
69.动力传递设备在其他例子中,是减速机中的正齿轮、准双曲面齿轮(hypoid gear)、蜗轮(worm gear)。在减速机的情况下,作为第1传感器11,使用对电机的电流值、功率值进行测定的传感器,作为第2传感器12,使用轴承箱或者齿轮箱中安装的加速度传感器或者温度传感器。在这些的情况下,为了确定运转条件,驱动侧、被动侧的齿轮的齿数、减速机的安装方向被存储于存储部13,使用其来求取运转条件即可。
70.动力传递设备在其他例子中,是执行器中的滚珠丝杠、梯形丝杠。在执行器的情况下,作为第1传感器11,使用对电机的电流值、功率值进行测定的传感器,作为第2传感器12,使用轴承箱或者螺母上安装的加速度传感器或者温度传感器。在这些情况下,为了确定运转条件,滚珠丝杠的安装方向或者载重的方向、全长等被存储于存储部13,使用其来求取运转条件即可。
71.(实施方式2)
72.在实施方式2中,特征量预测模型31m的学习算法是使用了神经网络(neural network)的具有教师的深度学习。在深度学习的情况下,信号是按照时间顺序得到的,因此优选是递归神经网络(recurrent neural network),也可以使用lstm(long short term memory,长短期记忆)网络。
73.实施方式2中的异常判定装置1的结构除学习处理的详细顺序以外,与实施方式1相同,因此针对共用结构赋予相同的附图标记并省略详细的说明。
74.实施方式2中,异常判定装置1也执行图2的流程图所示的学习处理。控制部10在步骤s105中,计算向学习中途的神经网络的输入层赋予运转条件并从输出层输出的特征量与实际从第2传感器12得到的信号的特征量的误差,使用误差传播法来使中间层的参数学习。例如,计算作为运转条件而将转速以及载重赋予给输入层的情况下输出的特征量与从作为加速度传感器的第2传感器12实际输出的振动的特征量的误差,使计算出的误差传播。步骤s103中计算的特征量例如是振动的振幅、频率。也可以是振幅或者频率任意一个的平均值、中央值等的统计处理后的值等。在其他例子中,特征量是振动的有效值rms。在使用温度传感器作为第2传感器12的情况下,也可以将温度本身处理为特征量。
75.图4是表示特征量预测模型31m的内容例的图。包含对判定对象的动力传递设备的运转条件进行输入的输入层311、以及对正常时应从第2传感器12输出的信号的特征量进行输出的输出层312。使用深度学习的特征量预测模型31m包含位于输入层311以及输出层312
的中间的1个或者多个层所构成的节点组,如上所述,包含通过实际的正常时从第2传感器12输出的信号的教师数据而完成学习的中间层313。
76.在图4的例子中,向输入层311输入作为运转条件的电力传递设备的转速以及载重。也可以输入电力传递设备的速度。若正常,则输出层312输出应从第2传感器12输出的信号的特征量。在图4的例子中,输出层312输出振动的有效值rms。另外,若正常,特征量也可以是应从第2传感器12输出的信号的峰值、频率等。
77.在实施方式2中,也通过图4的流程图所示的顺序,进行异常判定。实施方式2的异常判定装置1在步骤s202中,将运转条件赋予给完成学习的特征量预测模型31m的输入层311,在步骤s203中确定从输出层312输出的特征量。在使用图4的具体例所示的特征量预测模型31m的情况下,由于输出针对运转条件的正常时的振动的有效值,因此将其设为特征量。也可以将使用特征量预测模型31m输出的值而计算的确定的值设为特征量。
78.控制部10同样执行步骤s204以后的处理,对从学习了正常状态的特征量预测模型31m输出的特征量与实际从第2传感器12得到的信号的特征量进行比较且不一致的情况下(s206:否),判定为异常(s208)。
79.在通过特征量预测模型31m来利用深度学习的实施方式2中,在判定为正常的情况下,也可以使用步骤s204中获取的信号来执行图2的流程图所示的学习处理并且进行特征量预测模型31m的再学习。由此,可反映动力传递设备被使用的环境并且提高精度。
80.(实施方式3)
81.在实施方式3中,运转条件也基于从第1传感器11输出的信号而使用学习模型来预测。图5是表示实施方式3中的异常判定装置1的结构的框图。实施方式3的异常判定装置1除了在存储部13中存储运转条件学习模型32m、运转条件通过运转条件学习模型32m而被确定这方面以外,是与实施方式1同样的结构。因此,针对与实施方式1共用的结构,赋予相同的附图标记并省略详细的说明。
82.图6是表示实施方式3中的运转条件学习模型32m的创建处理顺序的一个例子的流程图。运转条件学习模型32m的学习算法可以与实施方式1的特征量预测模型31m同样地是回归分析,也可以与实施方式2同样地是使用了神经网络的具有教师的深度学习。在使用深度学习的情况下,输入信号是按照时间顺序而得到的,因此也可以使用rnn、特别是lstm网络。以下的处理针对已知是正常状态的电力传递设备、例如检查结束的新品的电力传递设备而被执行。
83.控制部10针对已知的运转条件下的动力传递设备获取来自第1传感器11的信号(步骤s301)。控制部10对步骤s301中获取到的信号,创建对应了已知的运转条件的教师数据(步骤s302),执行使用了创建出的教师数据的学习处理(步骤s303)。控制部10通过步骤s303的学习处理,结束来自已知一个运转条件的第1传感器11的信号的学习。
84.在步骤s303中,在通过回归分析来学习的情况下,将来自第1传感器11的信号的特征量作为变量,学习导出应求取的运转条件的函数以及确定系数。特征量例如是来自第1传感器11的信号波形的频率、峰值振幅、fft处理后的功率值等。运转条件例如是转速或者载重。在具体例中,控制部10通过回归分析来求取基于多个教师数据以频率、峰值振幅为变量来求取转速的回归式中的系数。在通过深度学习来学习的情况下,控制部10向创建中途的神经网络输入教师数据,学习神经网络的中间层中的权重以及偏置(bias)等的参数。
85.通过反复执行图6的流程图所示的学习处理,创建基于来自第1传感器11的信号、或者其特征量来推断运转条件的运转条件学习模型32m。运转条件学习模型32m被存储于存储部13,在后述的异常判定处理中被利用。
86.图7是表示运转条件学习模型32m的内容例的图。图7的例子表示使用深度学习的情况下的例子。运转条件学习模型32m包含对来自第1传感器11的信号的多个特征量进行输入的输入层321、以及输出运转条件的输出层322。运转条件学习模型32m包含位于输入层321以及输出层322的中间的1个或者多个层所构成的节点组,包含通过从运转条件已知的第1传感器11输出的信号的教师数据而完成学习的中间层323。
87.在图7的例子中,向输入层321输入根据来自第1传感器11的信号波形而得到的特征量。特征量例如可以是振幅、频率、其统计的数值。输出层322输出根据第1传感器11的信号而推测的动力传递设备的运转条件的每个项目的数值。输出层322例如输出转速、速度、载重各自的数值。通过使用运转条件学习模型32m,能够在动力传递设备不设置用于直接测定速度、加速度、转速等的运转条件的传感器的情况下,确定运转条件。
88.图8是表示使用了运转条件学习模型32m的异常判定处理顺序的一个例子的流程图。若开始判定对象的动力传递设备的运用,则控制部10基于控制程序10p,在稳定状态(向固定方向运转中)下的任意的时机执行以下的处理。另外,图8的流程图所示的处理顺序之中,对与实施方式1中的图3的流程图所示的处理顺序共用的顺序,赋予相同的步骤编号并省略详细的说明。
89.取代通过运算来确定运转条件,控制部10获取从第1传感器11得到的信号(步骤s211),对获取到的信号进行信号处理来求取特征量,赋予给完成学习的运转条件学习模型32m(步骤s212)。控制部10确定从运转条件学习模型32m输出的运转条件(步骤s213),将其赋予给完成学习的特征量预测模型31m(s202),执行s203以后的处理。
90.由此,即使不在动力传递设备设置速度传感器、加速度传感器、编码器并直接得到运转条件,也能够根据驱动动力传递设备的电机中的电流值等比较容易读取的信息来精度优良地推断运转条件。
91.(实施方式4)
92.动力传递设备根据从停止到加速中、恒定速度的运动中、减速中、上下或前进后退等的运转状况,即使根据相同的运转条件,从用于检测异常的第2传感器12得到的信号的特征也能够变化。在实施方式4中,根据运转状况来分开使用模型。图9是表示实施方式4中的异常判定装置1的结构的框图。除了存储部13中存储多个特征量预测模型31m,与实施方式1中的结构同样。对与共用的结构赋予相同的附图标记并省略详细的说明。
93.图10是表示来自第2传感器12的信号的波形的一个例子的图。在图10所示的例子中,第2传感器12是加速度传感器,图10的横轴表示时间经过,纵轴表示振动。如图10所示,从为了检测异常而安装的第2传感器输出的信号的特征量根据运转状况而不同。因此,优选特征量预测模型31m根据运转状况而被学习。
94.图11是表示特征量预测模型31m的生成方法的另一个例子的流程图。关于运转状况,输入来自动力传递设备的电机的控制设备的信号,或者预先作为测试信号而已知。另外,也可以对来自第1传感器11的信号进行信号处理,根据振动频率、振幅等的特征量来判别。图11的流程图所示的处理顺序之中,对与实施方式1中的图2的流程图所示的处理顺序
共用的处理赋予相同的步骤编号并省略详细的说明。
95.控制部10判别动力传递设备的运转状况(步骤s111),确定运转条件(s101),获取来自第2传感器12的信号(s102),计算特征量(s103)。
96.控制部10按照步骤s111中判别出的各个运转状况,通过步骤s101中确定出的运转条件和步骤s103中计算出的特征量来创建教师数据(步骤s114)。执行对按照各个运转状况而区别创建的教师数据的模型中的系数、或者神经网络中的参数进行学习的学习处理(步骤s115)。
97.这样,特征量预测模型31m按照各个运转状况而被创建,如图9所示那样分别存储于存储部13。图12是表示实施方式4中的基于控制部10的异常判定处理顺序的一个例子的流程图。若判定对象的动力传递设备开始运用,则控制部10基于控制程序10p来一直或者定期执行以下的处理。另外,图12的流程图所示的处理顺序之中,对与实施方式1中的图3的流程图所示的处理顺序共用的顺序,赋予相同的步骤编号并省略详细的说明。
98.控制部10判别动力传递设备的运转状况(步骤s221),若确定运转条件(s201),则对步骤s221中判别出的运转状况所对应的特征量预测模型31m的输入层311,赋予确定出的运转条件(步骤s222)。控制部10在从特征量预测模型31m输出的其运转状况下正常的情况下,确定应从第2传感器12输出的信号的特征量(s203),判断实际的信号的特征量(s204、205)是否一致(s206),判断有无异常。
99.这样,通过利用按照运转状况的预测模型,并不局限于仅对以恒定速度运动中的稳定状态的动力传递设备而判定异常,能够进行与状况相应的判定。
100.运转状况的判别处理也可以应用于仅在确定状况的情况下进行学习以及异常判定。例如,在图11的流程图所示的处理中,控制部10在步骤111中判别运转状况,判断是否为稳定状态,在稳定状态(以固定速度运动中)或者加速中的情况以外,不进行步骤s101以下的处理。该情况下,在图12的流程图所示的处理中,控制部10在步骤s221中判别运转状况,判断是否为稳定状态或者加速中,在稳定状态或者加速中以外的情况下,不进行步骤s202以下的处理。也可以这样仅在判别出状况的基础上能够判定的状况的期间,进行步骤s202以下的处理。
101.实施方式4中的运转条件的确定中,能够应用使用了实施方式2所示的运转条件学习模型32m的方法。
102.(实施方式5)
103.图13是表示实施方式5中的异常判定装置1的结构的框图。实施方式5的异常判定装置1除了在存储部13中存储有多个特征量预测模型31m、多个运转条件学习模型32m以及运转状况判别模型33m、以及运转状况通过运转状况判别模型33m而判别以外,是与实施方式1同样的结构。因此,针对与实施方式1共用的结构,赋予相同的附图标记并省略详细的说明。
104.在实施方式5中,运转状况也基于从第1传感器11输出的信号而使用学习模型而预测。图14是表示来自第1传感器11的信号的波形的一个例子的图。第1传感器11在图14的例子中为电流计。如实施方式4中的图10所示,对应于根据运转状况而来自第2传感器12的信号的波形不同,根据运转状况,通过电流计而测定的电流值变动。因此,即使不能从动力传递设备的控制装置得到运转状况,也能够通过学习电流值来推断判别运转状况。
105.图15是表示实施方式5中的运转状况判别模型33m的创建处理顺序的一个例子的流程图。运转状况判别模型33m的学习算法优选是使用了神经网络的具有教师的深度学习。由于信号是按照时间顺序而得到的,因此可以使用rnn,尤其是也可以使用lstm网络。以下的处理针对异常状态以及正常状态这两方的电力传递设备而执行。
106.控制部10针对已知的运转状况下的动力传递设备,获取来自第1传感器11的信号(步骤s401)。控制部10针对步骤s401中获取到的信号,创建使已知的运转状况(停止、加速中、前进、后退、减速中等)对应了的教师数据(步骤s402),将创建出的教师数据输入给神经网络,执行对神经网络的中间层中的权重以及偏置等的参数进行学习的学习处理(步骤s403)。控制部10通过步骤s403的学习处理,结束来自运转状况已知的一个第1传感器11的信号的学习。
107.通过反复执行图15的流程图所示的学习处理,神经网络成为在输入了来自第1传感器11的信号的情况下判别运转状况的运转状况判别模型33m。运转状况判别模型33m被存储于存储部13,在后述的异常判定处理中被利用。
108.图16是表示运转状况判别模型33m的内容例的图。运转状况判别模型33m包含对来自第1传感器11的信号的多个特征量进行输入的输入层331、以及输出运转状况的输出层332。运转状况判别模型33m包含位于输入层331以及输出层332的中间的1个或者多个层所构成的节点组,包含通过从运转状况已知的第1传感器11输出的信号的教师数据而完成学习的中间层333。
109.在图16的例子中,向输入层331输入根据来自第1传感器11的信号波形而得到的特征量。特征量例如可以是振幅、频率、其统计的数值。输出层332对根据第1传感器11的信号而推断判别的动力传递设备的运转状况进行输出。输出层332具体来讲,输出分别针对不同的运转状况(停止、加速中、前进、后退、减速中等)的概率。通过使用运转状况判别模型33m,能够在不设置用于从控制动力传递设备的控制装置直接获取测定动力传递设备的运转状况的传感器的情况下,确定运转条件。
110.图17是表示实施方式5中的异常判定处理顺序的一个例子的流程图。若判定对象的动力传递设备的运用开始,则控制部10基于控制程序10p来一直或者定期执行以下的处理。另外,图17的流程图所示的处理顺序之中,针对与实施方式4中的图12的流程图所示的处理顺序共用的顺序,赋予相同的步骤编号并省略详细的说明。
111.控制部10取代直接判别运转状况,按时间划分获取从第1传感器11得到的信号(步骤s231),将获取到的信号分别赋予给完成学习的运转状况判别模型33m的输入层331(步骤s232)。控制部10针对各个信号确定从运转状况判别模型33m输出的运转状况(步骤s233)。
112.基于确定出的运转状况,提取确定的运转状况(例如,仅前进)的信号(步骤s234),选择与确定出的运转状况相应的运转条件学习模型32m以及特征量预测模型31m(步骤s235)。
113.控制部10向步骤s235中选择出的运转条件学习模型32m赋予提取到的信号(步骤s236),确定从运转条件学习模型32m输出的运转条件(步骤s237)。控制部10将确定出的运转条件赋予给步骤s235中选择出的特征量预测模型31m(步骤s238),确定所输出的特征量(步骤s239)。
114.然后,控制部10获取在时间上对应于提取到的信号的来自第2传感器的信号
(s204),计算特征量(s205),根据是否与步骤s239中确定出的特征量一致来判定有无异常(s206
‑
s209),结束处理。
115.由此,即使不从动力传递设备的控制设备得到运转状况,不设置速度传感器、加速度传感器、编码器并直接得到运转条件,也能够根据驱动动力传递设备的电机中的电流值等比较容易读取的信息来精度优良地推断运转条件。
116.(实施方式6)
117.在实施方式6中,特征量预测模型31m从能够与异常判定装置1通信连接的服务器装置提供。图18是表示包含实施方式6中的异常判定装置1的系统的结构的框图。如图18所示,在实施方式6中,异常判定装置1除了控制部10、存储部13、输入部14以及输出部15还具备通信部16,能够通过该通信部16,经由网络n来与服务器装置2通信连接。
118.网络n是所谓的因特网。网络n也可以包含实现基于下一代或者各个世代高速便携通信标准等的标准的无线通信的通信运营商所提供的网络。
119.服务器装置2使用服务器计算机,具备控制部20、存储部21以及通信部22。控制部20是使用了cpu或者gpu的处理器,包含内置的易失性存储器、时钟等。控制部20执行基于存储部21中存储的服务器程序2p的各处理,使通用服务器计算机作为进行特征量预测模型2m的创建、更新以及使用的确定的装置而发挥功能。
120.存储部21使用硬盘,除了服务器程序2p,还存储控制部20参照的信息。存储部21存储特征量预测模型2m。存储部21中存储的服务器程序2p可以通过通信部22来从外部获取并存储。
121.通信部22包含网卡。控制部20能够通过通信部22,进行经由网络n的与客户端装置4之间的信息的收发。
122.这样,特征量预测模型2m被存储于服务器装置2。向特征量预测模型2m的运转条件的输入以及特征量的确定处理通过服务器装置2,基于服务器程序2p而被执行。异常判定装置1在不进行特征量预测模型31m的生成以及利用等的运算负载重的处理的情况下,得到信息并进行异常判定。能够利用服务器装置2的丰富的硬件资源来利用学习模型。
123.另外,上述那样公开的实施方式在全部方面是示例,应认为不是限制性的。本发明的范围并不通过上述意思,而通过权利要求书来表示,意图包含与权利要求书等同的意思以及范围内的全部变更。
124.附图标记说明
[0125]1ꢀꢀ
异常判定装置
[0126]
10
ꢀꢀ
控制部(运转条件确定部、特征量确定部、判定部)
[0127]
13
ꢀꢀ
存储部
[0128]
14
ꢀꢀ
输入部
[0129]
31m、2m
ꢀꢀ
特征量预测模型
[0130]
32m
ꢀꢀ
运转条件学习模型
[0131]
33m
ꢀꢀ
运转状况判别模型
[0132]2ꢀꢀ
服务器装置。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1