一种变电站巡检机器人表计图像识别动态修正方法与流程
1.本发明涉及机器人图像处理技术领域,特别涉及一种变电站巡检机器人表计图像识别动态修正方法。
背景技术:
2.变电站为电力设备中的一种,具体是指电力系统中对电压和电流进行变换,接受电能及分配电能的场所。为保证变电站的安全使用,需要定期对变电站进行巡检,人工巡检是变电站巡检的传统作业方式,巡检人员有时由于工作劳累和厌烦等因素,很容易造成漏检、错检,根据中国电科院的统计显示,每年由于漏检和错检造成的直接经济损失都要超过26亿元,可见人工巡检难以保证电力系统的安全可靠。随着科技的发展,使用巡检机器人完成巡检任务,可以提高变电站运行的可靠性,成为一种发展趋势。
3.现有巡检机器人多采用自动导引小车配合摄像云台对变电站的设备仪表进行变电站巡检工作。但是存在以下问题:一,自动导引小车行走至拍摄位置停止时,受惯性等因素影响,车体会产生倾角,至使所要拍摄的仪表部分或全部超出摄像云台的拍摄范围;二,摄像云台受与自动导引小车之间的最大向上扬角限制,自动导引小车只能行至与变电站的设备距离较远处进行拍摄,因此摄像云台只要水平转动微小角度,所要拍摄的仪表即偏离拍摄范围。
技术实现要素:
4.为解决上述问题,本发明提供一种变电站巡检机器人表计图像识别动态修正方法。
5.本发明采用的技术方案为:
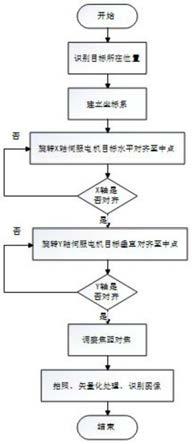
6.一种变电站巡检机器人表计图像识别动态修正方法,包括以下步骤,一启动摄像云台,并移动摄像云台,识别所要拍摄的仪表的位置,使所要拍摄的仪表全部出现在摄像云台的拍摄范围内;二建立坐标系,以摄像云台拍摄范围的中心点为原点,建立x轴y轴坐标系,并记录所要拍摄的仪表在拍摄范围坐标系的初始位置;三x轴位置调整,摄像云台根据所要拍摄的仪表在拍摄范围坐标系的初始位置,计算与x轴的变量数值,并根据x轴变量数值旋转x轴伺服电机进行微调,修正所要拍摄的仪表至拍摄范围坐标系x轴上;四y轴位置调整,摄像云台根据所要拍摄的仪表在拍摄范围坐标系的初始位置,计算与y轴的变量数值,并根据y轴变量数值旋转y轴伺服电机进行微调,修正所要拍摄的仪表至拍摄范围坐标系y轴上;五拍照处理,摄像云台调整焦距,对焦后对所要拍摄的仪表进行拍照,并进行矢量处理,矢量处理后的图片通过图像识别工具转换为显示数值。
7.优选的,所述摄像云台根据δx=f[(x
′
)
‑
(x)]计算与x轴的变量数值。
[0008]
优选的,所述摄像云台根据δy=f[(y
′
)
‑
(y)]计算与x轴的变量数值。
[0009]
优选的,所述步骤三和步骤四的先后顺序能够进行互换。
[0010]
本发明的有益效果是:
[0011]
本发明通过在摄像云台的拍摄范围内建立坐标系,并计算所要拍摄的仪表初始位置与坐标系x轴和y轴的变量数值,根据变量数值利用私服电机进行二次微调摄像云台,修正调摄像云台位置,使得所要拍摄的仪表位于摄像云台的拍摄范围中心点。在变电站巡检时,通过本发明可使得摄像云台的成像效果较好,经矢量处理后的图片通过图像识别工具转换为显示数值的准确率更高。
附图说明
[0012]
图1和图2为现有摄像云台使用时的成像示意图;
[0013]
图3为本发明的结构示意图
[0014]
图4为本发明图像识别动态修正的流程示意图;
[0015]
图5为发明第一实施例的动态修正示意图;
[0016]
图6为发明第一实施例的动态修正示意图。
[0017]
图3中,1
‑
摄像云台、2
‑
竖直旋转伺服电机、3
‑
水平旋转伺服电机。
具体实施方式
[0018]
下面将结合本发明实施例的附图,对本发明实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有付出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0019]
现有的摄像云台在使用时如图1所示,若所要拍摄的仪表处于摄像云台的拍摄范围内,且位于摄像云台成像范围的中心点,则摄像云台成像后,其内部的图像识别工具根据成像后的图片上的指针与零点位置偏角,能够有效的进行转换,形成显示数值。如图2所示,若所要拍摄的仪表处于摄像云台的拍摄范围内,但并未处于摄像云台成像范围的中心点,摄像云台内部的图像识别工具则无法有效的进行转换,无法形成显示数值。
[0020]
如图3所示,本发明在现有摄像云台1的硬件基础上增加了竖直旋转伺服电机2和水平旋转伺服电机3,使得摄像云台1通过竖直旋转伺服电机2能够竖直旋转,通过水平旋转伺服3电机能够水平旋转。由于伺服电机对控制速度及位置精度的控制非常准确,因而可使得摄像云台1能够实现微小调整。需要说明的是除通过伺服电机能够实现上述效果外,采用其他机械机构亦能实现上述效果。
[0021]
进行图像识别动态修正时,如图4所示,首先启动摄像云台,并移动摄像云台,识别所要拍摄的仪表的位置,使所要拍摄的仪表全部出现在摄像云台的拍摄范围内。然后建立坐标系,以摄像云台拍摄范围的中心点为原点,建立x轴y轴坐标系,摄像云台通过内部存储系统记录所要拍摄的仪表在拍摄范围坐标系的初始位置。然后进行x轴位置调整,摄像云台根据所要拍摄的仪表在成像范围坐标系的初始位置,计算与x轴的变量数值,并根据x轴变量数值旋转x轴伺服电机进行微调,修正所要拍摄的仪表至成像范围坐标系x轴上。然后进行y轴位置调整,摄像云台根据所要拍摄的仪表在成像范围坐标系的初始位置,计算与y轴的变量数值,并根据y轴变量数值旋转y轴伺服电机进行微调,修正所要拍摄的仪表至成像范围坐标系y轴上,此时所要拍摄的仪表即位于摄像云台的拍摄范围的中心点处。最后进行拍照处理,摄像云台调整焦距,对焦后对所要拍摄的仪表进行拍照,拍照的表计图片通过图
像识别工具矢量处理后转换为显示数值。
[0022]
为了具体描述该图像识别动态修正方法,本发明给出两个实施例。第一实施例如图5所示,启动摄像云台,并移动摄像云台后,所要拍摄的仪表的位置出现在摄像云台的拍摄范围内。以摄像云台拍摄范围的中心点为原点,建立x轴y轴坐标系后,所要拍摄的仪表初始位置位于x轴的j和k之间及y轴的3处。此时摄像云台通过内部存储系统记录所要拍摄的仪表在拍摄范围坐标系的初始位置,即|x
′
=(k,j),y
′
=3。然后进行x轴位置调整,摄像云台根据所要拍摄的仪表在成像范围坐标系的初始位置x
′
=(k,j),y
′
=3;通过公式δx=f[(x
′
)
‑
(x)],公式中x表示x轴原点位置,即x=(f,g)。计算与x轴的变量数值,即δx=f[(k
‑
f),(j
‑
g)],根据x轴变量数值δx,旋转x轴的水平旋转伺服电机移动δx个单位进行微调,修正所要拍摄的仪表至成像范围坐标系x轴上。然后进行y轴位置调整,摄像云台根据所要拍摄的仪表在成像范围坐标系的初始位置x
′
=(k,j),y
′
=3;通过公式δy=f[(y
′
)
‑
(y)],公式中y表示y轴原点位置,即y=0。计算与y轴的变量数值,即δy=f[(3
‑
0)],根据y轴变量数值δy,旋转y轴的竖直旋转伺服电机移动δy个单位进行微调,修正所要拍摄的仪表至成像范围坐标系y轴上。此时所要拍摄的仪表即位于摄像云台的拍摄范围的中心点处,即可进行拍照处理。摄像云台调整焦距,对焦后对所要拍摄的仪表进行拍照,拍照的表计图片通过图像识别工具矢量处理后识别指针与零点位置偏角,按比例显示对应数值。
[0023]
第二实施例如图6所示,启动摄像云台,并移动摄像云台后,所要拍摄的仪表的位置出现在摄像云台的拍摄范围内。以摄像云台拍摄范围的中心点为原点,建立x轴y轴坐标系后,所要拍摄的仪表初始位置位于x轴上及y轴的3处。此时摄像云台通过内部存储系统记录所要拍摄的仪表在拍摄范围坐标系的初始位置,即x
′
=(f,g),y
′
=3。然后直接跳过x轴位置调整,直接进行y轴位置调整,摄像云台根据所要拍摄的仪表在成像范围坐标系的位置x
′
=(f,g),y
′
=3;通过公式δy=f[(y
′
)
‑
(y)],公式中y表示y轴原点位置,即y=0。计算与y轴的变量数值,即δy=f[(3
‑
0)],根据y轴变量数值δy旋转y轴的竖直旋转伺服电机移动δy个单位进行微调,修正所要拍摄的仪表至成像范围坐标系y轴上。此时所要拍摄的仪表即位于摄像云台的拍摄范围的中心点处,即可进行拍照处理,摄像云台调整焦距,对焦后对所要拍摄的仪表进行拍照,并进行矢量处理,矢量处理后的图片通过图像识别工具识别指针与零点位置偏角为90
°
,转换为显示数值1.5。
[0024]
需要说明的是若所要拍摄的仪表的初始位置位于y轴上,则摄像云台根据所要拍摄的仪表在成像范围坐标系的位置,计算与x轴的变量数值,并根据x轴变量数值旋转x轴伺服电机进行微调,修正所要拍摄的仪表至成像范围坐标系x轴上后,所要拍摄的仪表即位于摄像云台的拍摄范围的中心点处,因而可跳过y轴位置调整。此外,x轴位置调整和y轴位置调整的先后顺序也可进行互换,互换先后顺序后,并不影响修正结果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1