配电网故障无人巡检系统的制作方法
1.本发明用于对配电网故障进行巡检路径规划的系统。
背景技术:
2.在配电网庞大的体量下,故障的产生数量也日益增多,但是经过配电网监测系统所监测的故障多为疑似故障,需要工作人员进行实地排查才能够确定故障是否存在或对故障进行排除。但是现有的配电网很多布设在野外,人工巡检往往需要耗费大量的时间成本去对疑似故障进行排查。
技术实现要素:
3.本发明的目的是为了克服现有人工巡检需要耗费大量的时间成本的问题,提供了一种配电网故障无人巡检系统。
4.本发明的配电网故障无人巡检系统,包括巡检无人机充电模块、配电网地图模块、疑似故障点处理模块、路径生成模块和巡检无人机;
5.巡检无人机充电模块,配置在部分配电网设备上,用于从配电网取电;
6.配电网地图模块,用于存储并更新待检测区域内配电网设备的地理位置;以及根据巡检无人机充电模块所在的配电网设备的地理位置,得到巡检无人机充电模块的地理位置并映射于配电网地图模块;
7.疑似故障点处理模块,与配电网监测系统和配电网地图模块连接,用于接收配电网监测系统所生成的疑似故障点信息,并将疑似故障点信息映射于配电网地图模块;疑似故障点信息包括疑似故障点的地理位置;
8.路径生成模块,与配电网地图模块连接,用于获取疑似故障点的地理位置和巡检无人机充电模块的地理位置,并根据巡检无人机的工作参数、疑似故障点与疑似故障点的距离、疑似故障点与巡检无人机充电模块的距离,以及巡检无人机充电模块与巡检无人机充电模块的距离,在考虑巡检无人机续航的情况下生成巡检路径;巡检无人机的工作参数包括无人机的航速、无人机的蓄电池电量和无人机耗电量;
9.巡检无人机,与路径生成模块连接,用于根据巡检路径进行巡检。
10.本发明的有益效果是:
11.因此随着无人机的发展,对无人机的在配电网巡检方向的应用也随之提出。通过规划无人机巡检路径,能够事先对疑似故障点进行逐个检测以确定疑似故障点确实存在故障或进行排除,再根据巡检结构,通知工作人员进行后续的故障排除工作,作为人工巡检的补充,从而节约了人工巡检的大量时间和减少了工作人员的工作强度。
附图说明
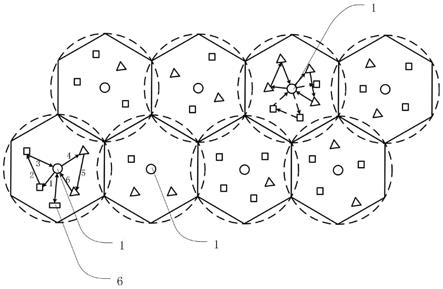
12.图1为本发明的配电网故障无人巡检系统的工作原理示意图;其中,六边形区域为理想状态下划分的巡检区块,巡检无人机充电模块位于各巡检区块的中心,三角形和正方
形分别为不同优先等级的疑似故障点,箭头线上的数字表示巡检顺序,实线的箭头线和虚线的箭头线表示不同优先等级的巡检路径;
13.图2为本发明的配电网故障无人巡检系统的结构示意图。
具体实施方式
14.具体实施方式一,如图2所示,本实施方式的配电网故障无人巡检系统,包括巡检无人机充电模块1、配电网地图模块2、疑似故障点处理模块3、路径生成模块4和巡检无人机5;
15.巡检无人机充电模块1,配置在部分配电网设备上,用于从配电网取电;
16.配电网地图模块2,用于存储并更新待检测区域内配电网设备的地理位置;以及根据巡检无人机充电模块1所在的配电网设备的地理位置,得到巡检无人机充电模块1的地理位置并映射于配电网地图模块2;
17.疑似故障点处理模块3,与配电网监测系统和配电网地图模块2连接,用于接收配电网监测系统所生成的疑似故障点信息,并将疑似故障点信息映射于配电网地图模块2;疑似故障点信息包括疑似故障点的地理位置;
18.路径生成模块4,与配电网地图模块2连接,用于获取疑似故障点的地理位置和巡检无人机充电模块1的地理位置,并根据巡检无人机5的工作参数、疑似故障点与疑似故障点的距离、疑似故障点与巡检无人机充电模块1的距离,以及巡检无人机充电模块1与巡检无人机充电模块1的距离,在考虑巡检无人机5续航的情况下生成巡检路径;巡检无人机5的工作参数包括无人机的航速、无人机的蓄电池电量和无人机耗电量;
19.巡检无人机5,与路径生成模块4连接,用于根据巡检路径进行巡检。
20.具体地,巡检无人机充电模块1可以采用现有的ct取电装置,而配电网设备主要指架空线路、电缆和杆塔等设备,巡检无人机充电模块1可以设在杆塔上,便于从电缆上取电。并且在进行电网建设和验收时,也有相应的地图,可以作为配电网地图模块2的功能补充,用于更精确地获得各配电网设备的地理位置,以及能够计算得到两个配电网设备间的距离。
21.配电网监测系统包括卫星、远红外监测设备等对配电网进行监测的系统,主要通过图像处理和红外线图像处理获得配电网上的一些明显的疑似故障点,比如线缆破损、设备损坏、污染物附着、高温点、火灾隐患点等。
22.配电网监测系统还包括现有的配电网远程监测装置,该配电网远程监测装置能够在监测过程中发现疑似故障点,并通过配电网的结构等参数推断出疑似故障点的大概地理位置。
23.上述的各疑似故障点,都有可能产生确定的故障,而巡检无人机5就是通过搭载有相应的检测设备以及摄像头等,对疑似故障点进行逐个检测以确定疑似故障点确实存在故障或进行排除,从而通知工作人员进行后续的故障排除工作。
24.路径生成模块4,主要将巡检无人机充电模块1考虑到巡检路径中,使得巡检无人机5能够在巡检过程中电能不足时,巡检路径的巡检顺序能够满足巡检无人机5进行边充电边检测的运行。而巡航路径可以看做是二维的,可以采用现有如蚁群模型等路径规划算法,在考虑巡检无人机充电模块1存在的情形下依据最大续航和检测最多的疑似故障点为优化
原则,生成巡航路径。其中巡检路径的起点可以设定为指定的巡检无人机充电模块1或待检测区域内指定的一点。
25.最佳实施例,本实施例是对实施方式一的进一步说明,本实施例中疑似故障点处理模块3,还用于在设定的时间接收新的疑似故障点信息,并将新的疑似故障点信息映射于配电网地图模块2;
26.路径生成模块4,还用于获取新的疑似故障点的地理位置,并生成新的巡检路径。
27.具体地,疑似故障点的产生可以看做是每时每刻都会发生,因此在生成一个巡检路径,待检测区域还会持续产生疑似故障点,设定的时间可以是一个确切的时间段,也可以是在新的疑似故障点的生成满足一定数量后的不确定时间段,将新的疑似故障点和原巡检路径中剩余的疑似故障点一起考虑,并以新的巡检路径生成时巡检无人机5所在点为起点,生成新的巡检路径。
28.最佳实施例,本实施例是对实施方式一的进一步说明,如图1所示,本实施例中配电网地图模块2,还用于将待检测区域划分多个巡检区块,且每个巡检区块内至少配置有一个巡检无人机充电模块1,巡检无人机充电模块1与对应巡检区块内的疑似故障点的距离小于巡检无人机5的最大续航距离的1/2,两个巡检无人机充电模块1之间的距离小于巡检无人机5的最大续航距离;
29.一个巡检无人机5对应于至少一个巡检区块;
30.路径生成模块4,还用于在一个巡检无人机5所对应的巡检区块范围内,生成巡检路径。
31.具体地,巡检区块是待检测区域的子单元,在存在多台巡检无人机5时,可以指定巡检无人机5负责相应巡检区块的巡检,而一个巡检无人机5所负责的多个巡检区块应当尽量相邻,一个巡检无人机5在所负责的一个巡检区块或多个巡检区块中的巡检路径的生成,则相当于实施方式一中的方式。
32.各个巡检区块的划分,可以根据地理条件,相应负责该巡检区块的无人机续航能力和航速进行划分(如果续航能力强或航速大,则相应的巡检区块面积可以划分较大)。在巡检区块仅存在一个巡检无人机充电模块1时,巡检区块可以简单看做以巡检无人机充电模块1为中心,以巡检无人机5最大续航距离为直径的圆。在巡检区块仅存在多个巡检无人机充电模块1时,可以根据几何原理进行计算。巡检区块可以重叠。
33.并且,还通过人工控制,临时改变巡检无人机5巡检区域或巡检路径,以及改变巡检区块的划分。
34.最佳实施例,本实施例是对实施方式一的进一步说明,本实施例中疑似故障点信息还包括疑似故障点的优先级;
35.配电网地图模块2,还用于根据疑似故障点的优先级,将疑似故障点的优先级将疑似故障点分为n个等级,并映射于配电网地图模块2;
36.路径生成模块4,还用于根据第n级疑似故障点与第n级疑似故障点的距离,第n级疑似故障点与巡检无人机充电模块1的距离,生成巡检路径。
37.具体地,根据实际工作经验,配电网的相应故障可以分为多个优先级,包括需要尽快得到反馈的最高优先级、可以延后检测的次优先级,以及可以视为无害的最低优先级,具体的等级划分可以根据实际工作需要和配电网监测系统所检测到疑似故障点的种类进行
划分。
38.在规划路径时,可以按照优先级由高到低规划多条不同优先级的巡检路径,巡检无人机5在自身的巡检区域内,按照巡检路径的由高到低依次进行巡检。
39.并且,还可以根据实际需要,在一条巡检路径中存在两个相邻优先级的疑似故障点,所生成的两个巡检路径,可以按照疑似故障点的平均优先级进行对比,从而先根据平均优先级高的巡检路径进行巡检。
40.在规划多条不同优先级的巡检路径时,应尽量使后续的巡检路径的起点与上一巡检路径的终端相接,如果无法相接,可以通过巡检无人机充电模块1进行中转。
41.最佳实施例,本实施例是对实施方式一的进一步说明,本实施例中还包括固定无人机容纳单元6;
42.配电网地图模块2,还用于存储并更新待检测区域内固定无人机容纳单元6的地理位置;并映射于配电网地图模块2;
43.路径生成模块4,还用于获取固定无人机容纳单元6的地理位置;以及在巡检无人机5对巡检路径上的所有疑似故障点巡检完毕后,根据巡检无人机5的工作参数、固定无人机容纳单元6与最后一个疑似故障点的距离、最后一个疑似故障点与巡检无人机充电模块1的距离,以及巡检无人机充电模块1与固定无人机容纳单元6的距离,在考虑巡检无人机5续航的情况下生成第一回收路径;
44.巡检无人机5,还用于根据第一回收路径,航行至固定无人机容纳单元6。
45.具体地,固定无人机容纳单元6可以是设在一个待检测区域内或一个巡检区块内的固定建筑物,用于收纳保护巡检无人机5,并提供给工作人员对巡检无人机5做定期维护使用。
46.需注意的是,该固定无人机容纳单元6在巡检的开始也是可以作为巡检无人机5的起点的,因此还路径生成模块4还需要生成从固定无人机容纳单元6到达巡检路径起点(第一个疑似故障点或第一个巡检无人机充电模块1)的起始路径。
47.最佳实施例,本实施例是对实施方式一的进一步说明,本实施例中还包括移动无人机容纳单元7;
48.移动无人机容纳单元7包括可移动的无人机容纳仓、容纳单元定位模块7-1和通信模块7-2,且无人机容纳仓、容纳单元定位模块7-1和通信模块7-2相对固定;
49.配电网地图模块2,还用于在待检测区域内设置有至少一个可行区域;
50.路径生成模块4,还用于获取可行区域;以及在巡检无人机5对巡检路径上的所有疑似故障点巡检完毕后,根据巡检无人机5的工作参数,寻找巡检无人机5剩余航程范围内的可行区域,生成第二回收路径和回收信息;回收信息包括巡检无人机5沿第二回收路径航行的预估时间以及移动无人机容纳单元7在可行区域内的回收点;
51.容纳单元定位模块7-1,与移动无人机容纳单元7的控制器连接,用于实时获取移动无人机容纳单元7的定位信息并发送至移动无人机容纳单元7的控制器;
52.通信模块7-2,与路径生成模块4和移动无人机容纳单元7的控制器连接,用于接收回收信息并发送至移动无人机容纳单元7的控制器,从而控制移动无人机容纳单元7根据回收信息移动到回收点;
53.巡检无人机5,还用于根据第二回收路径,航行至移动无人机容纳单元7。
54.具体地,移动无人机容纳单元7可以是在一个待检测区域内或一个巡检区块内的移动的车辆等装置,可行区域是能够令移动无人机容纳单元6方便到达的区域,移动无人机容纳单元7的无人机容纳仓,用于收纳保护巡检无人机5,并提供给工作人员对巡检无人机5做定期维护使用。
55.在巡检无人机5完成巡检任务后,可以通知该移动无人机容纳单元7移动到可行区域相应的回收点对巡检无人机5进行回收,回收信息包括巡检无人机5沿第二回收路径航行的预估时间,从而可以令移动无人机容纳单元7以计算后的行使速度提前到达或恰好到达回收点。
56.但是,在距离过长时,移动无人机容纳单元7以最大行使速度也无法在预估时间内到达,则可以令巡检无人机5在距离回收点最近巡检无人机充电模块1()上停留或盘旋,直至移动无人机容纳单元7到达。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1