一种车辆远程控制方法及系统与流程
1.本发明涉及汽车技术领域,尤其涉及一种车辆远程控制方法及系统。
背景技术:
2.随着汽车电子技术及通信技术的日益进步,汽车发展越来越趋向于智能化和网联化,因此智能网联汽车逐渐成为车主的选择。
3.目前,智能网联汽车已具备车辆远程控制功能并能满足部分车主需求。然而现有的车辆远程控制功能仅适合单任务的请求与反馈,并不适用于未来智能网联汽车复杂的多任务的请求和反馈。例如,远程空调控制是tbox对空调进行单任务的请求开闭控制,而远程泊车控制需要由tbox对泊车控制器进行路线下发、心跳保持、请求开启、请求泊车、请求停止等多任务控制,导致现有的车辆远程控制功能无法适用。
4.因此,亟需一种车辆远程控制方法,不仅能实现单任务的远程控制的需求,还能支撑智能网联汽车对于多任务的远程控制的需求。
技术实现要素:
5.本发明实施例所要解决的技术问题在于,提供一种车辆远程控制方法及系统,不仅能实现单任务的远程控制的需求,还能支撑智能网联汽车对于多任务的远程控制的需求,具有架构简单、扩展性强等优点。
6.为了解决上述技术问题,本发明实施例提供了一种车辆远程控制方法,所述方法包括以下步骤:
7.汽车远程服务提供商tsp对用户下发的车辆远程控制指令进行响应,以将该车辆远程控制指令分解成一个或多个原子服务,并在检测到与车辆的车载通信终端t-box建立通信之后,向t-box或中央域控制器发起所有原子服务请求;
8.t-box或中央域控制器根据接收到的每一个原子服务请求,确定执行相应原子服务的ecu和/或区域控制器并分别发起执行请求,以实现对车辆进行单任务或多任务的远程控制。
9.其中,所述方法进一步包括:
10.t-box或中央域控制器接收各ecu和/或各区域控制器执行相应原子服务的情况并反馈给tsp。
11.其中,所述方法进一步包括:
12.tsp将t-box或中央域控制器反馈的所有原子服务的执行情况进行汇总并解析发送给用户。
13.其中,所述车辆远程控制指令为远程泊车指令或一键备车指令。
14.本发明实施例还提供了一种车辆远程控制系统,包括tsp和t-box;其中,
15.tsp,用于对用户下发的车辆远程控制指令进行响应,以将该车辆远程控制指令分解成一个或多个原子服务,并在检测到与t-box建立通信之后,向t-box发起所有原子服务
请求;
16.t-box包括第一多原子服务请求单元;其中,第一多原子服务请求单元,用于根据接收到的每一个原子服务请求,确定执行相应原子服务的ecu和/或区域控制器并分别发起执行请求,以实现对车辆进行单任务或多任务的远程控制。
17.其中,t-box还包括第一服务执行情况反馈单元;其中,第一服务执行情况反馈单元,用于接收各ecu和/或各区域控制器执行相应原子服务的情况并反馈给tsp。
18.其中,t-box与各ecu和/或各区域控制器之间通过以太网方式进行通信或can fd方式进行通信;t-box与tsp之间通过消息队列遥测传输mqtt通信方式进行数据传输。
19.本发明实施例又提供了另一种车辆远程控制系统,包括tsp、t-box和中央域控制器;其中,
20.tsp,用于对用户下发的车辆远程控制指令进行响应,以将该车辆远程控制指令分解成一个或多个原子服务,并在检测到与t-box建立通信之后,向中央域控制器发起所有原子服务请求;
21.t-box,用于连接tsp及中央域控制器并建立三方通信;
22.中央域控制器包括第二多原子服务请求单元;其中,第二多原子服务请求单元,用于根据接收到的每一个原子服务请求,确定执行相应原子服务的ecu和/或区域控制器并分别发起执行请求,以实现对车辆进行单任务或多任务的远程控制。
23.其中,中央域控制器还包括第二服务执行情况反馈单元;其中,第二服务执行情况反馈单元,用于接收各ecu和/或各区域控制器执行相应原子服务的情况并反馈给tsp。
24.其中,中央域控制器与各ecu和/或各区域控制器之间通过以太网方式进行通信或can fd方式进行通信;t-box与tsp之间通过消息队列遥测传输mqtt通信方式进行数据传输。
25.实施本发明实施例,具有如下有益效果:
26.本发明通过tsp将车辆远程控制指令分解为1或n个原子服务,独立向tbox或中央域控制器ccu发起请求,让tbox/ccu向相关的ecu和/或各区域控制器domain发起相应的原子服务请求,并将ecu和/或domain的执行反馈发送给tsp汇总及解析传输至用户,不仅能实现单任务的远程控制的需求,还能支撑智能网联汽车对于多任务的远程控制的需求,使得架构简单(即可满足如远程泊车、一键备车等功能),且扩展性强(即原子服务可在tsp直接部署,tbox/ccu可以透传原子服务,避免因为新增原子服务而导致的软件变更)。
附图说明
27.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,根据这些附图获得其他的附图仍属于本发明的范畴。
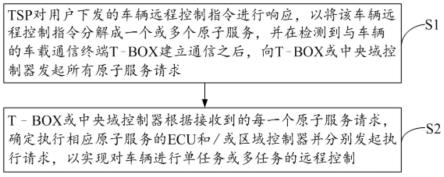
28.图1为本发明实施例提供的一种车辆远程控制方法的流程图;
29.图2为本发明实施例提供的一种车辆远程控制方法的应用场景图;
30.图3为本发明实施例提供的一种车辆远程控制系统的结构示意图;
31.图4为本发明实施例提供的另一种车辆远程控制系统的结构示意图。
具体实施方式
32.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。
33.如图1所示,为本发明实施例中,提供的一种车辆远程控制方法,所述方法包括以下步骤:
34.步骤s1、tsp对用户下发的车辆远程控制指令进行响应,以将该车辆远程控制指令分解成一个或多个原子服务,并在检测到与车辆的车载通信终端t-box建立通信之后,向t-box或中央域控制器发起所有原子服务请求;
35.步骤s2、t-box或中央域控制器根据接收到的每一个原子服务请求,确定执行相应原子服务的ecu和/或区域控制器并分别发起执行请求,以实现对车辆进行单任务或多任务的远程控制。
36.具体过程为,在步骤s1中,首先,用户通过手机app下发车辆远程控制指令(如远程空调控制、远程泊车、一键备车等),tsp对用户下发的车辆远程控制指令进行响应,以将该车辆远程控制指令分解成一个或多个原子服务。应当说明的是,原子服务是从业务角度进行描述和定义,是产品中再也不能够细分的业务服务能力单元。原子服务能够进行各类碎片化的基于业务场景的组装。
37.其次,在整个远程控制过程中,tsp需要与tbox/ccu维持心跳链接,以确保远程控制的实时性与有效性。因此,需要检测tsp是否与车辆的车载通信终端t-box建立通信,并且还需在数据传输中一直保持通信。
38.最后,tsp在检测到与车辆的车载通信终端t-box建立通信之后,向t-box发起所有原子服务请求;或者经由与t-box建立的通信通道向中央域控制器发起所有原子服务请求。其中,t-box与tsp之间通过消息队列遥测传输mqtt通信方式进行数据传输。
39.在步骤s2中,t-box或中央域控制器根据接收到的每一个原子服务请求,确定执行相应原子服务的ecu和/或区域控制器并分别发起执行请求,让各ecu和/或各区域控制器按照下发的执行请求对相应的原子服务进行执行,以实现对车辆进行单任务(如空调)或多任务(如泊车、备车)的远程控制。其中,t-box或中央域控制器与各ecu和/或各区域控制器之间通过以太网方式进行通信或can fd方式进行通信。
40.在本发明实施例中,该方法进一步包括:t-box或中央域控制器接收各ecu和/或各区域控制器执行相应原子服务的情况并反馈给tsp;以及,tsp将t-box或中央域控制器反馈的所有原子服务的执行情况进行汇总并解析发送给用户。
41.如图2所示,对本发明实施例中的一种车辆远程控制方法的应用场景做进一步说明:
42.1、用户通过手机app下发远程控制指令;应当说明的是,用户操作方式往往很简单,比如远程泊车只需按一下开启按钮即可。
43.2、tsp将简单的远程控制指令分解为n个原子服务。
44.3、整个远程控制,tsp与tbox/ccu均需要维持心跳链接,以确保远程控制的实时性与有效性;
45.其中,原子服务执行过程:
[0046]1’
1、tsp向tbox/ccu发起原子服务1的请求;
[0047]1’
2、tbox/ccu向原子服务1相关的ecu1/domain1发起请求;
[0048]1’
3、ecu1/domain1向tbox/ccu反馈原子服务1的执行情况;
[0049]1’
4、tbox/ccu向tsp反馈原子服务1的执行情况;
[0050]
……
[0051]
n’1、tsp向tbox/ccu发起原子服务n的请求;
[0052]
n’2、tbox/ccu向原子服务n相关的ecun/domainn发起请求;
[0053]
n’3、ecun/domainn向tbox/ccu反馈原子服务n的执行情况;
[0054]
n’4、tbox/ccu向tsp反馈原子服务n的执行情况;
[0055]
应当说明的是,各原子服务之间不互相耦合,不互相干涉,是独立的任务。
[0056]
4、tsp汇总原子服务1-n的反馈情况,并解析。
[0057]
5、tsp对远程控制整体反馈给app,通过app向用户显示。
[0058]
如图3所示,为本发明实施例中,提供的一种车辆远程控制系统,包括tsp和t-box;其中,
[0059]
tsp,用于对用户下发的车辆远程控制指令进行响应,以将该车辆远程控制指令分解成一个或多个原子服务,并在检测到与t-box建立通信之后,向t-box2发起所有原子服务请求;
[0060]
t-box包括第一多原子服务请求单元;其中,第一多原子服务请求单元,用于根据接收到的每一个原子服务请求,确定执行相应原子服务的ecu和/或区域控制器并分别发起执行请求,以实现对车辆进行单任务或多任务的远程控制。
[0061]
其中,t-box还包括第一服务执行情况反馈单元;其中,第一服务执行情况反馈单元,用于接收各ecu和/或各区域控制器执行相应原子服务的情况并反馈给tsp。
[0062]
其中,t-box与各ecu和/或各区域控制器之间通过以太网方式进行通信或can fd方式进行通信;t-box与tsp之间通过消息队列遥测传输mqtt通信方式进行数据传输。
[0063]
如图4所示,为本发明实施例中,提供的另一种车辆远程控制系统,包括tsp、t-box和中央域控制器;其中,
[0064]
tsp,用于对用户下发的车辆远程控制指令进行响应,以将该车辆远程控制指令分解成一个或多个原子服务,并在检测到与t-box建立通信之后,向中央域控制器发起所有原子服务请求;
[0065]
t-box,用于连接tsp及中央域控制器并建立三方通信;
[0066]
中央域控制器包括第二多原子服务请求单元;其中,第二多原子服务请求单元,用于根据接收到的每一个原子服务请求,确定执行相应原子服务的ecu和/或区域控制器并分别发起执行请求,以实现对车辆进行单任务或多任务的远程控制。
[0067]
其中,中央域控制器还包括第二服务执行情况反馈单元;其中,第二服务执行情况反馈单元,用于接收各ecu和/或各区域控制器执行相应原子服务的情况并反馈给tsp。
[0068]
其中,中央域控制器与各ecu和/或各区域控制器之间通过以太网方式进行通信或can fd方式进行通信;t-box与tsp之间通过消息队列遥测传输mqtt通信方式进行数据传输。
[0069]
实施本发明实施例,具有如下有益效果:
[0070]
本发明通过tsp将车辆远程控制指令分解为1或n个原子服务,独立向tbox或中央
域控制器ccu发起请求,让tbox/ccu向相关的ecu和/或各区域控制器domain发起相应的原子服务请求,并将ecu和/或domain的执行反馈发送给tsp汇总及解析传输至用户,不仅能实现单任务的远程控制的需求,还能支撑智能网联汽车对于多任务的远程控制的需求,使得架构简单(即可满足如远程泊车、一键备车等功能),且扩展性强(即原子服务可在tsp直接部署,tbox/ccu可以透传原子服务,避免因为新增原子服务而导致的软件变更)
[0071]
值得注意的是,上述装置实施例中,所包括的各个装置单元只是按照功能逻辑进行划分的,但并不局限于上述的划分,只要能够实现相应的功能即可;另外,各功能单元的具体名称也只是为了便于相互区分,并不用于限制本发明的保护范围。
[0072]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,所述的程序可以存储于一计算机可读取存储介质中,所述的存储介质,如rom/ram、磁盘、光盘等。
[0073]
以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1