色带导航纠偏方法、存储介质和电子设备与流程
1.本发明涉及工业机器人领域,具体涉及一种色带导航纠偏方法、存储介质和电子设备。
背景技术:
2.色带导引是在自动导引车的形式路径上设置光学标志(粘贴色带或涂漆),通过车载的光学传感器摄像头(视觉传感器)采集图像信号识别来实现导引的方法。光学导引与磁带导引较为类似,主要的优点是路面铺设较为容易,拓展与更改路径相对磁带导引容易,成本低。
3.如图2-3所示,由于色带导航也属于有轨导航的一种,一般采取的导航算法,即依据视觉传感器的摄像头返回来的“左右偏差”数据,即y轴方向的偏差,计算agv偏离轨道的误差,其公式为errorvalue=k*y,然后调整差速agv左右电机的速度进行纠偏,其中,errorvalue为调整量,y为y轴偏差距离,k为常量,其是根据实验获得经验数值,范围在1~120内,不同结构、规格的agv的k数值有所不同。由于摄像头距离地面的高度限制,摄像头采集地面x轴方向、y轴方向的范围有限,如agv偏航较多,会导致传感器无法读取色带,在一些拐弯路径,仅通过上述计算偏差的公式会导致agv即使已在x轴方向偏航,却不能及时发现,导致不能及时的控制agv进行调整,导致agv脱轨。
4.上述问题假设通过增大k值解决,虽然可使agv在弯道行驶时不易脱轨,但会导致agv在直线行驶时过调,形成蛇形走位,由于摄像头的检测范围有限,过调量大还容易导致摄像头难以检测到色带,造成脱轨。
技术实现要素:
5.本发明的第一个发明目的在于克服现有的色带导航纠偏方法不能兼顾agv在直线、弯道上有效纠偏的问题,提供一种色带导航纠偏方法。
6.为实现以上发明目的,本发明采取以下技术方案:
7.色带导航纠偏方法,所述方法包括以下步骤:
8.视觉传感器采集agv中轴方向与色带轨道的角度偏移量xrole;
9.视觉传感器采集agv中轴与色带轨道的垂直距离偏移量ys;
10.根据求值公式x结合所述角度偏移量xrole和垂直距离偏移量ys获得偏差值errorvalue,其中所述求值公式x为预先设定;
11.agv根据轨道偏差值errorvalue调整车体位姿。
12.本发明的方法获取角度偏移量xrole、垂直距离偏移量ys;并通过预先设定的公式获得偏差值errorvalue,从而调整车体位姿。与现有技术相比,其同时兼顾到角度偏移量xrole、垂直距离偏移量ys,相比现有技术仅通过y轴方向的偏差纠正agv的位置,其纠正精度更高,有效防止agv在直线或弯道上偏航、脱轨。
13.优选的,所述求值公式x为errorvalue=k1*ys+k2*xrole,所述k1和k2是权重系
数。
14.优选的,当所述agv中轴方向与色带轨道的偏角位于色带轨道的左侧时,所述角度偏移量xrole为负值,反之为正值;当所述agv中轴位于所述色带轨道的左侧时,所述垂直距离偏移量ys为负值,反之为正值。
15.当轨道偏差值为正,控制终端控制差速驱动模组的左侧电机减速,右侧电机加速,当轨道偏差值为负,则反之。
16.优选的,所述视觉传感器距水平面100mm,xrole的范围在-45~45度之间,ys数据范围在-58.5mm~58.5mm之间。
17.优选的,所述控制终端通过pid算法计算调整量。即在获得偏差值errorvalue值后,通过pid算法计算调整量。
18.本发明的另一个发明目的在于提供一种存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述方案的色带导航纠偏方法。与现有技术相比,本发明的存储介质由于可执行上述方案的色带导航纠偏方法,因此,具有上述方案的所有优点。
19.本发明的第三个发明目的在于提供一种电子设备,包括处理器和存储器,所述处理器和所述存储器之间相互通信,所述存储器用于存放可执行的指令,使所述处理器执行该指令时实现上述的色带导航纠偏方法。
附图说明
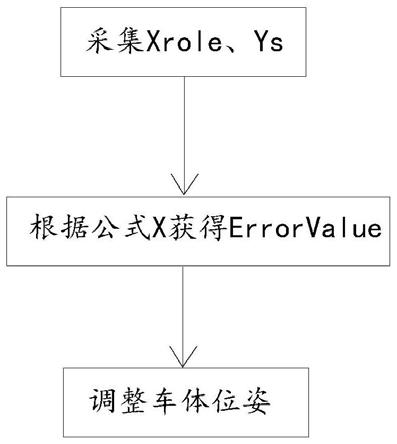
20.图1是本发明的流程简图;
21.图2是现有技术的原理图1;
22.图3是现有技术的原理图2;
23.图4是现有技术的原理图3;
24.图5是本发明的原理图1;
25.图6是本发明的原理图2;
26.图7是本发明的原理图3;
27.图8是本发明的原理图4。
具体实施方式
28.以下根据附图,进一步的说明本发明的技术方案:
29.实施例一:
30.参见图1所示,本实施例公开了一种色带导航纠偏方法,所述方法包括以下步骤:视觉传感器采集agv中轴方向与色带轨道的角度偏移量xrole;视觉传感器采集agv中轴与色带轨道的垂直距离偏移量ys;根据求值公式x结合所述角度偏移量xrole和垂直距离偏移量ys获得偏差值errorvalue,其中所述求值公式x为预先设定,agv根据轨道偏差值errorvalue调整车体位姿。
31.上述求值公式x为errorvalue=k1*ys+k2*xrole,所述k1和k2是权重系数。在本方案中,k1、k2是根据实验获得经验数值,不同结构、规格的agv的k数值有所不同。
32.在一实施例中,当所述agv中轴方向与色带轨道的偏角位于色带轨道的左侧时,所述角度偏移量xrole为负值,反之为正值;当所述agv中轴位于所述色带轨道的左侧时,所述
垂直距离偏移量ys为负值,反之为正值。
33.当轨道偏差值为正,控制终端控制差速驱动模组的左侧电机减速,右侧电机加速,当轨道偏差值为负,则反之。
34.在一实施例中,视觉传感器距水平面100mm,xrole的范围在-45~45度之间,ys数据范围在-58.5mm~58.5mm之间。
35.在一实施例中,所述控制终端通过pid算法计算调整量。
36.工作原理:
37.如5-6所示,摄像头采集的图形信息包括摄像头与色带之间夹角,以及摄像头与色带之间的距离,由于摄像头的高度固定,拍摄范围有限,而根据实验证明,摄像头的安装高度与水平在相距100mm时拍摄效果最佳,在该高度限制下,摄像头的拍摄范围在摄像头75mm*117mm内,摄像头对色带采集范围为以其中轴为中心线的-45~45度之间,垂直距离值范围为-58.5mm~58.5mm,超过该范围,摄像头无法采集色带信息,因此,上述视觉传感器距水平面100cm,xrole的范围在-45~45度之间,ys数据范围在-58.5mm~58.5mm之间。
38.并且,取xrol、ys值单独分离,当xrol为正,agv向右偏移,反之,向左偏移;
39.当ys为正,agv为正,agv向右偏移,反之,向左偏移。获如下表格:
40.偏离信息正负xrole左电机减速,右电机加速左电机加速,右电机减速ys左电机减速,右电机加速左电机加速,右电机减速
41.当调整量为正,控制终端控制差速驱动模组的左侧电机加速,右侧电机减速,当调整量为负,则反之。
42.参见图7所示,agv偏离与色带的偏差较大,这个时候,通过本发明的公式将xrole,ys的作用叠加起来,可增大调整量。
43.参见图8所示,按ys的值分析,调整的趋势是:左电机加速,右电机减速;而xrole的值分析,调整的趋势是:左电机减速,右电机加速,通过公式将xrole和ys的值进行抵消,最终计算出来的errorvalue的值更精确。
44.本发明的方法获取角度偏移量xrole、垂直距离偏移量ys;并通过预先设定的公式获得偏差值errorvalue,从而调整车体位姿。与现有技术相比,其同时兼顾到角度偏移量xrole、垂直距离偏移量ys,相比现有技术仅通过y轴方向的偏差纠正agv的位置,其纠正精度更高,有效防止agv在直线或弯道上偏航、脱轨。
45.实施例二:
46.本实施例公开了一种存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述方案的色带导航纠偏方法。与现有技术相比,本发明的存储介质由于可执行上述方案的色带导航纠偏方法,因此,具有上述方案的所有优点。
47.实施例三:
48.本实施例公开了一种电子设备,包括处理器和存储器,所述处理器和所述存储器之间相互通信,所述存储器用于存放可执行的指令,使所述处理器执行该指令时实现上述的色带导航纠偏方法。
49.根据上述说明书的揭示和教导,本发明所属领域的技术人员还可以对上述实施方式进行变更和修改。因此,本发明并不局限于上面揭示和描述的具体实施方式,对本发明的
一些修改和变更也应当落入本发明的权利要求的保护范围内。此外,尽管本说明书中使用了一些特定的术语,但这些术语只是为了方便说明,并不对本发明构成任何限制。
相关技术
网友询问留言
已有1条留言
-
 0188464... 来自[中国] 2023年07月29日 10:07挺厉害的
0188464... 来自[中国] 2023年07月29日 10:07挺厉害的
1