一种雷达光标远程控制系统的制作方法
1.本实用新型属于光标远程控制系统,具体涉及一种雷达光标远程控制系统。
背景技术:
2.近年来,随着先进雷达快速涌现,大批旧雷达面临退役和报废,通过对旧雷达进行改进和设计,实现对旧雷达远程操控,使其能够用于实战化电子对抗、导弹(遥测弹)非炸靶试评估、实弹靶试评估、导弹性能评估及其引战配合性能是否可靠、雷达诱饵等领域,能够有效降低实战化训练和先进雷达实弹靶试成本,提高旧雷达的利用率,为战备、训练、武器装备研制等方面提供有力保障。但在对旧雷达进行改装和设计的过程中,面临轨迹球远程控制及雷达光标同步显示难以控制的问题。
技术实现要素:
3.本实用新型为解决旧雷达改装和设计过程中,轨迹球远程控制及雷达光标同步显示难以控制的技术问题,提供一种雷达光标远程控制系统。
4.为实现上述目的,本实用新型提供如下技术方案:
5.一种雷达光标远程控制系统,其特殊之处在于,包括位于远程控制端的上位机和第一交换机,以及位于雷达本地控制端的第二交换机和控制单元;
6.所述上位机、第一交换机、第二交换机和控制单元依次连接;所述上位机上设有与第二界面相同的第一界面,所述第二界面为实际雷达显示器界面;上位机连接有光标移动部件,用于调整第一界面上的光标位置;第一交换机用于将上位机输出的与第一界面上光标位置对应的电信号转换为光信号,第二交换机用于将第一交换机输出的光信号转换为电信号并发送至控制单元,所述控制单元连接于雷达本地控制端的雷达轨迹球和雷达机柜之间,通过产生方波和方向标志,控制第二界面上的光标按照第一界面上的光标位置相应移动;
7.所述第一界面上建立有平面直角坐标系,第一界面上的平面直角坐标系原点与第二界面的极坐标极点坐标相对应,且第一界面上平面直角坐标系的x轴正半轴与第二界面中的极轴正半轴相对应。
8.进一步地,所述控制单元产生的对应第二界面上光标左右轴运动的方波个数a为:
9.a=n|ρ1sinθ
1-ρ2sinθ2|/d
10.其中,n为光标从第二界面最左端移动至最右端累计产生的方波脉冲数,d为第二界面的直径;
11.所述控制单元产生的对应第二界面上光标上下轴运动的方波个数b为:
12.b=n|ρ1cosθ
1-ρ2cosθ2|/d。
13.进一步地,所述控制单元产生的方向标志包括第二界面上光标左右轴运动的正标志和负标志,以及第二界面上光标上下轴运动的正标志和负标志;
14.若ρ1sinθ
1-ρ2sinθ2>0,则控制单元产生的方向标志为第二界面上光标左右轴运
动的正标志,否则,为第二界面上光标左右轴运动的负标志;若ρ1cosθ
1-ρ2cosθ2>0,则控制单元产生的方向标志为第二界面上光标上下轴运动的正标志,否则,为第二界面上光标上下轴运动的负标志;
15.其中,ρ1为第二界面上光标移动前位置坐标的极径,θ1为第二界面上光标移动前位置坐标的极角,ρ2为第二界面上光标移动后位置坐标的极径,θ2为第二界面上光标移动后位置坐标的极角。
16.进一步地,所述控制单元内设置有切换单元;所述切换单元,用于切换控制单元与本地控制端的雷达机柜是否连通。
17.进一步地,所述上位机、第一交换机、第二交换机和控制单元依次交互连接。
18.进一步地,所述光标移动部件为鼠标或轨迹球。
19.与现有技术相比,本实用新型的有益效果是:
20.1.本发明雷达光标远程控制系统,在远程控制端建立了第一界面,第一界面与实际雷达显示器界面相同,第一界面上建立有平面直角坐标系,与第二界面上的极坐标系相对应,第二界面上光标移动前后两点的距离可反映为方波个数,在第一界面上移动光标,计算移动前后两点的横向距离和纵向距离,并分别转换为方波个数,并根据第一界面上移动前后两点横坐标差值和纵坐标差值的正负确定光标移动方向,将这些信息发送至本地控制端后,即可使第二界面上的光标完成同步移动。本实用新型在不改变原有雷达的情况下,实现了在远程控制端对第二界面上光标进行远程控制的方法。
21.2.尤其对作为标靶实战化训练或进行反辐射导弹作战性能评估等,由于禁止人员在现场操控,无法在本地端对雷达光标进行控制时,可以采用本实用新型的雷达光标远程控制系统,不会影响雷达的本地原有功能和原有状态。
附图说明
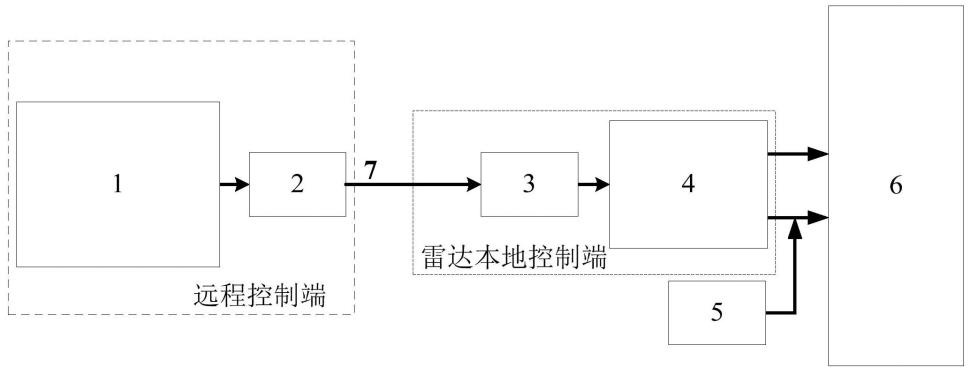
22.图1为本实用新型雷达光标远程控制系统的应用示意图;
23.图2为本实用新型中第一界面的示意图;
24.图3为第二界面上的坐标示意图;
25.图4为第一界面上的坐标示意图。
26.其中:1-上位机、2-第一交换机、3-第二交换机、4-控制单元、5-轨迹球、6-雷达机柜、7-光纤。
具体实施方式
27.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例并非对本实用新型的限制。
28.某些雷达在使用中,要通过在本地操控,使雷达显示界面上的雷达光标移动,尤其是当作为靶标实战化训练或进行反辐射导弹作战性能评估时,由于禁止人员在现场操控,所以需要远程对雷达光标进行操控,同时,还不能影响雷达本地的原有功能。本实用新型通过在雷达机柜和雷达轨迹球之间加装一个控制系统,实现了雷达光标的本地操作和远程控制操作,同时,不影响当前的机械状态,也不会改变雷达结构的原有状态。
29.如图1所示,本实用新型的雷达光标远程控制方法在应用时,包括位于远程控制端
的上位机1和第一交换机2,以及位于本地端的第二交换机3和控制单元4。上位机1上设有与第二界面相同的第一界面,第二界面为实际雷达显示器界面。上位机1连接有光标移动部件,用于调整第一界面上的光标位置。第一交换机2用于将上位机1输出的与第一界面上光标位置对应的电信号转换为光信号,第二交换机3用于将第一交换机2输出的光信号转换为电信号并发送至控制单元4,控制单元4连接于雷达本地控制端的雷达轨迹球5和雷达机柜6之间,通过产生方波和方向标志,控制第二界面上的光标按照第一界面上的光标位置相应移动。第一界面上建立有平面直角坐标系,第一界面上的平面直角坐标系原点与第二界面的极坐标极点坐标相对应,且第一界面上平面直角坐标系的x轴正半轴与第二界面中的极轴正半轴相对应。
30.现有的本地端雷达光标是通过轨迹球5进行控制的,轨迹球5组成及工作原理为:轨迹球5由球体、左右侧滚轴、上下侧滚轴、光栅盘、光电检测装置和底座等构成。轨迹球5左右侧及上下侧均安装有滚轴,滚轴上设有光栅盘和光电检测装置。转动轨迹球5时,轨迹球5中心位置不动,通过触摸轨迹球5使其转动并带动滚轴转动,使光电检测装置输出三组方波脉冲a、b和z相,其中,a、b两组脉冲相位差为90
°
,通过相位的先后可以判断出旋转方向,脉冲个数表示位移大小,脉冲速度表示光标移动速度,z相用于基点定位。
31.通过对轨迹球5组成和工作原理分析,为了保持原有雷达设备的完整性,本实用新型可在原有线路中接入控制单元4,完成脉冲和方向控制,实现对雷达光标的远程和本地切换控制的目的。
32.位于远程控制端的上位机1按照通信协议发送脉冲和移动方向组成的帧格式数据包,通过网口发送给第一交换机2,第一交换机2将以太网电信号转为光信号,通过光纤7远距离传输至雷达的本地控制端,本地控制端的第二交换机3将光纤7信号转为以太网电信号,再传输给控制单元4,控制单元4接受到数据包后,解析并发送方波脉冲和方向标志给雷达机柜,控制单元4可以采用muc控制盒。
33.远程控制端的上位机1软件采用c++或者labview等软件进行设计。在进行远程控制时,上位机1上可连接轨迹球或者鼠标,通过转动轨迹球或者鼠标点击的方式,移动第一界面上光标的位置,取代雷达端轨迹球5对雷达光标的运动控制。本实用新型的具体控制原理为:
34.在远程控制端建立图2所示的第一界面,使第一界面与第二界面相同,其中,第二界面为实际雷达显示器界面,在第一界面上建立平面直角坐标系,使第一界面上的平面直角坐标系原点与第二界面的极坐标极点坐标相对应,且平面直角坐标系的x轴正半轴与第二界面中的极轴正半轴相对应。原雷达的显示器为偏转线圈荧光屏显示器,在远程控制端的上位机1界面上设计第一界面,模拟原雷达显示器的雷达显示器界面(第二界面),实际测试雷达轨迹球5的输出信号得知,轨迹球5光标从第二界面最左端移动到第二界面最右端时累计产生2026个方波脉冲,因此,将上位机1雷达显示器界面的直径设置为d,实际雷达显示器的坐标点是极坐标形式,以极点o为平面坐标系的原点,即圆心作为极点,可将d沿着第二界面极轴所在水平方向和垂直方向均将直径d分为2026等份。第一界面的平面直角坐标系中,x轴的正半轴与第二界面的极轴ox相对应,第一界面的直径也为d,以圆心为坐标原点,在上位机1上绘制第一界面。如图3和图4所示,第二界面上的坐标点是极坐标形式,将上位机1第一界面第二界面的极坐标形式转化为直角坐标形式,可实现第二界面和第一界面坐
标点的一一对应。
35.根据第二界面上光标的移动需求,在第一界面上相应移动光标,通过第一界面上移动前后光标的坐标,计算第二界面上光标移动对应的左右轴运动方波个数和上下轴运动方波个数,同时,确定左右轴运动方向和上下轴运动方向。从远程控制端向雷达本地控制端的雷达机柜发送包含左右轴运动方波个数信息、上下轴运动方波个数信息、左右轴运动方向信息、上下轴运动方向信息的指令,使第二界面上的光标与第一界面上根据控制需求移动的光标位置一致。
36.如图3和图4,a点的极坐标值为a(ρ1,θ1),转换为在第一界面上的a
′
(ρ1sinθ1,ρ1cosθ1),若雷达系统初始状态时,雷达光标在第二界面上位于极点,对应第一界面上光标位于原点(0,0),假定需要在第二界面上将光标从极点运动到a点,在第一界面上将光标移动至a
′
点,第一界面上坐标点由显示(0,0)点变为显示(ρ1sinθ1,ρ1cosθ1),光标从原点移动到a
′
点,x轴方向坐标值增大ρ1sinθ1,方向为正,y轴方向坐标值增大ρ1cosθ,方向为正,此时,设a点对应的雷达轨迹球5左右轴运动对应的方波个数为a,由公式可得,同理,计算出a点对应的雷达轨迹球5上下轴运动对应的方波个数为
37.上位机1发送轨迹球5左右轴运动对应的方波个数a、轨迹球5左右轴正的方向标志、轨迹球5上下轴运动对应的方波个数b、轨迹球5上下轴正的方向标志给控制单元4。控制单元4接收到相应帧格式数据包后进行解析,产生两组分别用于控制对应上下轴引动和左右轴移动的pwm方波,以及方向标志给雷达机柜,使第二界面上的光标移动。
38.当第一界面上的光标继续移动至b
′
点时,第一界面上光标的坐标点由a
′
(ρ1sinθ1,ρ1cosθ1)点变为b
′
(ρ2sinθ2,ρ2cosθ2),x轴方向坐标值增大ρ1sinθ
1-ρ2sinθ2,方向为正,y轴值减小ρ1cosθ
1-ρ2cosθ2,方向为负。通过上述算法,可以算出b点的左右轴方波个数为n|ρ1sinθ
1-ρ2sinθ2|/d,左右轴方向标志为正,b点的上下轴方波个数为n|ρ1cosθ
1-ρ2cosθ2|/d,上下轴方向标志为负,将这些数据通过协议帧的格式发送给控制单元4,控制单元4接收到相应帧格式数据包后进行解析,产生两组分别用于控制对应左右轴移动和上下轴移动的pwm方波,以及方向标志给雷达机柜,实现雷达显示器的光标移动。
39.在第一界面上移动光标的方式可以是通过鼠标,也可以是通过轨迹球进行移动。
40.控制单元4一般可以采用mcu控制盒,由电源、stm32f429微处理器、轨迹球信号切换电路、mcu输出轨迹球x方向信号电路、mcu输出轨迹球y方向信号电路及以太网接口电路等构成。电源为dc-5v供电,从雷达轨迹球5线缆连接器上取电。轨迹球信号切换电路可以通过stm32f429微处理器控制继电器切换,来实现远程控制和本地控制切换。初始状态下,雷达的轨迹球5和雷达机柜连接,通过雷达机柜进行本地控制。远程控制时,stm32f429微处理器控制继电器切换,stm32f429微处理器的gpio产生pwm的方波和方向标志,使雷达光标实现远程控制。
41.另外,雷达本地端的轨迹球还可以设置多个,相应的在雷达本地端设置多个第二界面,各轨迹球分别用于控制各第二界面上光标的位置,这种情况下,对应的可在上位机1
上设置多个第一界面,分别与第二界面相对应。
42.对应的,本实用新型还提供了一种能够实现上述控制方法的控制系统,包括位于远程控制端的上位机1和第一交换机2,以及位于雷达本地控制端的第二交换机3和控制单元4。
43.控制单元4在控制中遵循本地控制优先级大于远程控制优先级,本地控制动作和反馈结果也可依次通过控制单元4、第二交换机3、第一交换机2实时更新到远程控制端的第一界面上,使远程控制端可以无缝接管本地控制。若需要配置该功能,可使上位机1、第一交换机2、第二交换机3和控制单元4之间为双向交互连接,在雷达本地控制端直接控制第二界面上光标位置时,即可在上位机1上得到反馈信息。
44.本实用新型在远程控制端第一界面上通过鼠标点击或轨迹球滚动移动光标,本地雷达的第二界面上光标同步移动到相应位置,通过远程控制端,可以精确控制本地雷达第二界面上光标的位置移动。
45.以上所述仅为本实用新型的实施例,并非对本实用新型保护范围的限制,凡是利用本实用新型说明书及附图内容所作的等效结构变换,或直接或间接运用在其他相关的技术领域,均包括在本实用新型的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1