车辆的路径跟踪方法、装置、车辆及存储介质与流程
本技术涉及车辆,特别涉及一种车辆的路径跟踪方法、装置、车辆及存储介质。
背景技术:
1、智能化作为车辆新四化的代表之一,如今的技术发展势头愈发快速,其中车辆的自动驾驶技术是智能化开发的主阵地,从技术流向可以划分为感知、定位、预测、决策、规划及控制六大模块,其中控制模块起着直接与车辆执行器直接交互的关键作用,自动驾驶车辆控制模块可分为纵向速度控制和横向路径跟踪控制,其中横向路径跟踪控制的目的是控制车辆方向盘或前轮转角,使得车辆按照预定路径转向行驶,横向路径跟踪控制算法可以提高路径跟踪精度,进而提升驾乘人员的安全感和舒适性。
2、相关技术中,车辆的路径跟踪算法有基于pid控制的路径跟踪、基于纯跟踪的路径跟踪以及基于模型预测控制的路径跟踪等方法。其中,基于pid控制的路径跟踪算法根据目标路径信息和当前车辆位姿信息,计算路径误差,调整车辆当前位姿,消除稳态误差,使车辆平稳运行;基于纯跟踪的方法,通过预先设定目标轨迹中的一个点,计算圆弧路径,根据车辆实时运动状态,对车辆前进方向和速度进行动态调整,能够实现精度较高的路径跟踪控制;基于模型预测控制的路径规划,其控制策略为根据系统k时刻的状态和控制输入,来预测k+1时刻的输出,主要实现模型的预测作用。
3、然而,以上方法虽然能够实现较为准确的路径跟踪,但是算法效率较低,并且无法实现在路径跟踪的过程中实时动态避障。
技术实现思路
1、本技术提供一种车辆的路径跟踪方法、装置、车辆及存储介质,以解决当前路径跟踪算法缺乏必要的控制稳定性理论,参数标定过于复杂等问题,从而增强用户体验感。
2、本技术第一方面实施例提供一种车辆的路径跟踪方法,包括以下步骤:
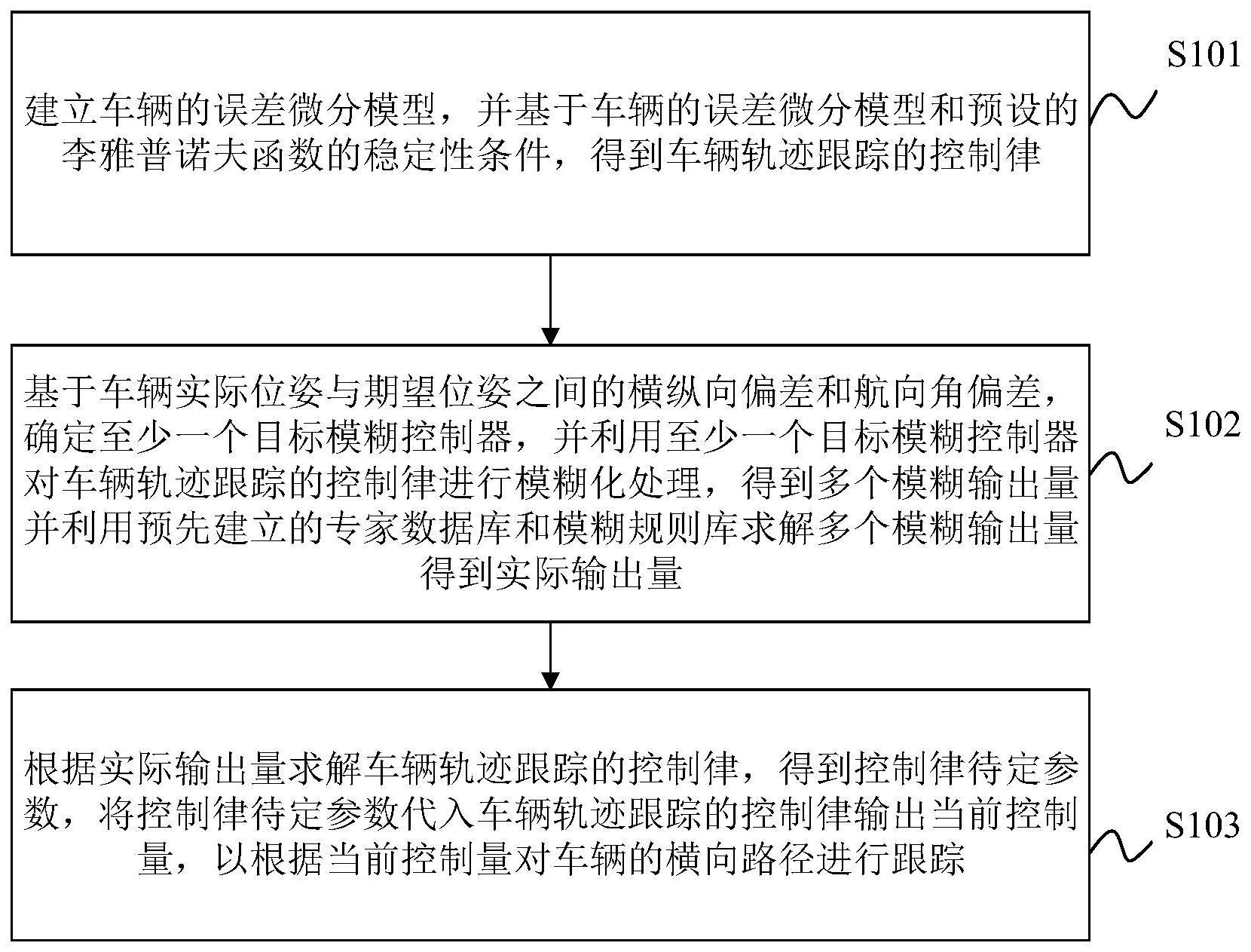
3、建立车辆的误差微分模型,并基于所述车辆的误差微分模型和预设的李雅普诺夫函数的稳定性条件,得到车辆轨迹跟踪的控制律;
4、基于车辆实际位姿与期望位姿之间的横纵向偏差和航向角偏差,确定至少一个目标模糊控制器,并利用所述至少一个目标模糊控制器对所述车辆轨迹跟踪的控制律进行模糊化处理,得到多个模糊输出量,并利用预先建立的专家数据库和模糊规则库求解所述多个模糊输出量,得到实际输出量;以及
5、根据所述实际输出量求解所述车辆轨迹跟踪的控制律,得到控制律待定参数,将所述控制律待定参数代入所述车辆轨迹跟踪的控制律输出当前控制量,以根据所述当前控制量对车辆的横向路径进行跟踪。
6、根据上述技术手段,本技术基于“李雅普诺夫稳定性理论+模糊逻辑推理系统”的路径跟踪控制算法具有算法理论覆盖面广、理论支撑强等特点,提出一种兼具控制算法稳定性理论和参数模糊自适应的自动驾驶汽车路径跟踪控制方法,鲁棒性更高,增强了用户体验感。
7、进一步地,所述利用所述至少一个目标模糊控制器对所述车辆轨迹跟踪的控制律进行模糊化处理,得到多个模糊输出量,包括:
8、确定所述至少一个目标模糊控制器输入参数,所述输入参数包括距离偏差和航向角偏差;
9、根据距离偏差的值域和航向角偏差的值域分别将所述距离偏差和所述航向角偏差分为多个第一模糊集,并根据所述车辆轨迹跟踪的控制律中每个待定参数的值域将所述每个待定参数分为多个第二模糊集;
10、基于所述第一模糊集和所述第二模糊集,利用所述至少一个目标模糊控制器对所述距离偏差、所述航向角偏差和所述每个待定参数进行模糊化处理,得到所述多个模糊输出量。
11、根据上述技术手段,本技术设计一种模糊控制器,可以实时调整参数,使系统具有较好的鲁棒性和稳定性。
12、进一步地,所述利用预先建立的专家数据库和模糊规则库求解所述多个模糊输出量,得到实际输出量,包括:
13、将每个模糊输出量变换为所述每个模糊输出量对应论域范围内的清晰量;
14、对所述清晰量进行尺度变换,得到所述实际的输出量。
15、根据上述技术手段,本技术通过建立模糊规则,可以使得系统算法更加精确,提高路径跟踪精度。
16、进一步地,所述车辆的误差微分模型为:
17、
18、其中,为纵向误差的微分,为横向误差的微分,为航向角误差的微分,xe为横向误差,ye为纵向误差,为航向角误差,v为车速,ω为角速度,vr为期望控制量,ωr为期望控制量。
19、根据上述技术手段,本技术通过计算得到车辆的误差微分模型,可以对任意轨迹进行跟踪测试,提高系统的跟踪范围。
20、进一步地,所述预设的李雅普诺夫函数为:
21、
22、其中,为李雅普诺夫函数,k2为待定参数。
23、根据上述技术手段,本技术通过李雅普诺夫函数,算法理论覆盖面广、理论支撑强,使系统具有较好的鲁棒性和稳定性。
24、进一步地,所述预设的李雅普诺夫函数的稳定性条件为:
25、
26、其中,为对李雅普诺夫函数求导。
27、根据上述技术手段,本技术通过李雅普诺夫函数求导,算法理论覆盖面广、理论支撑强,提高车辆路径跟踪的稳定性。
28、本技术第二方面实施例提供一种车辆的路径跟踪装置,包括:
29、构建模块,用于建立车辆的误差微分模型,并基于所述车辆的误差微分模型和预设的李雅普诺夫函数的稳定性条件,得到车辆轨迹跟踪的控制律;
30、处理模块,用于基于车辆实际位姿与期望位姿之间的横纵向偏差和航向角偏差,确定至少一个目标模糊控制器,并利用所述至少一个目标模糊控制器对所述车辆轨迹跟踪的控制律进行模糊化处理,得到多个模糊输出量,并利用预先建立的专家数据库和模糊规则库求解所述多个模糊输出量,得到实际输出量;以及
31、跟踪模块,用于根据所述实际输出量求解所述车辆轨迹跟踪的控制律,得到控制律待定参数,将所述控制律待定参数代入所述车辆轨迹跟踪的控制律输出当前控制量,以根据所述当前控制量对车辆的横向路径进行跟踪。
32、进一步地,所述处理模块,具体用于:
33、确定所述至少一个目标模糊控制器输入参数,所述输入参数包括距离偏差和航向角偏差;
34、根据距离偏差的值域和航向角偏差的值域分别将所述距离偏差和所述航向角偏差分为多个第一模糊集,并根据所述车辆轨迹跟踪的控制律中每个待定参数的值域将所述每个待定参数分为多个第二模糊集;
35、基于所述第一模糊集和所述第二模糊集,利用所述至少一个目标模糊控制器对所述距离偏差、所述航向角偏差和所述每个待定参数进行模糊化处理,得到所述多个模糊输出量。
36、进一步地,所述处理模块,具体用于:
37、将每个模糊输出量变换为所述每个模糊输出量对应论域范围内的清晰量;
38、对所述清晰量进行尺度变换,得到所述实际的输出量。
39、进一步地,所述车辆的误差微分模型为:
40、
41、其中,为纵向误差的微分,为横向误差的微分,为航向角误差的微分,xe为横向误差,ye为纵向误差,为航向角误差,v为车速,ω为角速度,vr为期望控制量,ωr为期望控制量。
42、进一步地,所述预设的李雅普诺夫函数为:
43、
44、其中,为李雅普诺夫函数,k2为待定参数。
45、进一步地,所述预设的李雅普诺夫函数的稳定性条件为:
46、
47、其中,为对李雅普诺夫函数求导。
48、本技术第三方面实施例提供一种车辆,包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序,以实现如上述实施例所述的车辆的路径跟踪方法。
49、本技术第四方面实施例提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行,以用于实现如上述实施例所述的车辆的路径跟踪方法。
50、由此,本技术提出一种兼具控制算法稳定性理论和参数模糊自适应的自动驾驶汽车路径跟踪控制方法,首先基于二自由度运动学模型推导车辆误差微分模型,然后基于李雅普诺夫反演法建立包含三个待定参数的控制律,接着建立模糊推理系统对上述三个待定参数进行模糊化处理,从而建立了基于模糊推理系统的智能汽车横向路径跟踪方法。由此,解决了当前路径跟踪算法缺乏必要的控制稳定性理论,参数标定过于复杂等问题,增强用户体验感。
51、本技术附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!