自主移动机器人及其调度方法、装置、设备和存储介质与流程
本技术涉及智能机器人,具体而言,涉及一种自主移动机器人及其调度方法、装置、设备和存储介质。
背景技术:
1、在多台自主移动机器人在指定工作场所中进行协同工作的场景中,根据从管理系统接收的任务,每台自主移动机器人可进行路径的规划与运动,并依靠自身的避障功能避让其他自主移动机器人。但在工作场所的环境空间比较局促的情况下,每台自主移动机器人均会面临因任务道路拥堵而无法正常通行的局面。
2、由于不同种类的自主移动机器人的通行、作业及避让策略不同,管理系统缺乏联合交通调度方案,使得多台不同种类的自主移动机器人无法混行或在混行时较易出现事故。
技术实现思路
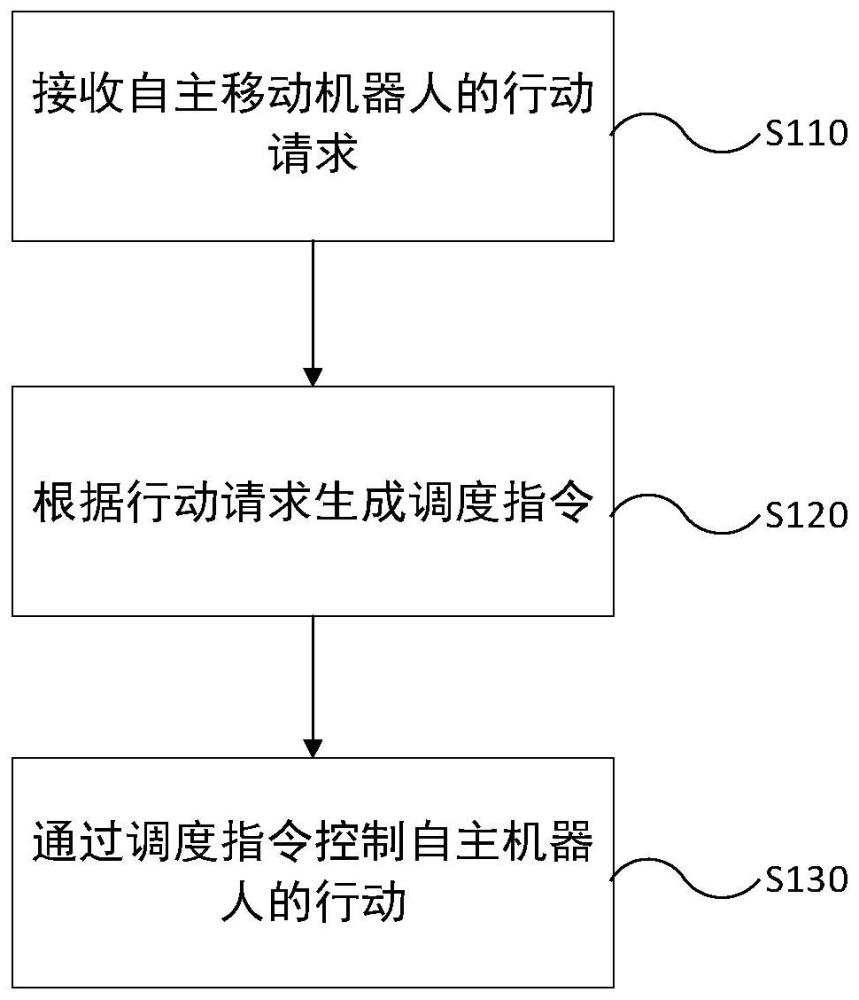
1、根据本技术的一方面,提供一种自主移动机器人的调度方法,包括:接收自主移动机器人的行动请求;根据所述行动请求生成调度指令;通过所述调度指令控制所述自主移动机器人的行动。
2、根据一些实施例,所述自主移动机器人包括行动机器人和目标机器人,所述行动请求包括超车请求;根据所述行动请求生成调度指令,包括:获取所述行动机器人的环境信息;根据所述环境信息确定所述行动机器人请求超车的所述目标机器人;根据所述超车请求生成所述行动机器人的调度指令;以及根据所述超车请求生成所述目标机器人的调度指令。
3、根据一些实施例,根据所述超车请求生成所述行动机器人的调度指令,包括:确定所述目标机器人的类型和/或工作状态,所述目标机器人的类型包括普通机器人和叉车型机器人,所述目标机器人的工作状态包括正常行驶状态和作业操作状态;根据所述目标机器人的类型和/或工作状态,生成所述行动机器人的允许超车或禁止超车的指令。
4、根据一些实施例,根据所述目标机器人的类型和/或工作状态,生成所述允许超车或禁止超车的调度指令,包括:在所述目标机器人处于所述正常行驶状态的情况下,生成所述行动机器人的允许超车的指令;在所述目标机器人为所述普通机器人且处于所述作业操作状态的情况下,生成所述行动机器人的允许超车的指令;在所述目标机器人为所述叉车型机器人且处于所述作业操作状态的情况下,生成所述行动机器人的禁止超车的指令。
5、根据一些实施例,生成所述行动机器人的允许超车的指令,包括:根据所述目标机器人的类型和/或工作状态设置超车管制区域;广播所述超车管制区域的信息,以禁止除所述行动机器人及所述目标机器人以外的自主移动机器人进入所述超车管制区域;在所述行动机器人超车完成后,解除所述超车管制区域。
6、根据一些实施例,生成所述行动机器人的禁止超车的指令,包括:为处于所述作业操作状态的所述目标机器人设置作业管制区域;广播所述作业管制区域的信息,以使得所述行动机器人在所述作业管制区域外停车等待;在所述目标机器人作业完成后,解除所述作业管制区域。
7、根据一些实施例,根据所述超车请求生成所述目标机器人的调度指令,包括:在所述目标机器人处于所述正常行驶状态的情况下,生成所述目标机器人的降速指令和/或靠边行驶指令;在所述目标机器人为所述普通机器人且处于所述作业操作状态的情况下,生成所述目标机器人的被超车标识,以禁止所述目标机器人启动行驶;在所述行动机器人完成超车后,解除所述目标机器人的被超车标识。
8、根据一些实施例,所述自主移动机器人包括行动机器人,所述行动请求包括作业请求;根据所述行动请求生成调度指令,包括:获取所述行动机器人的环境信息;根据所述作业请求和所述环境信息设置所述行动机器人的作业管制区域;根据所述作业管制区域的实时情况生成所述行动机器人的调度指令。
9、根据一些实施例,根据所述作业管制区域的实时情况生成所述行动机器人的调度指令,包括:确定所述作业管制区域内是否存在除所述行动机器人以外的自主移动机器人;若是,生成所述行动机器人的停车等待指令,以使得所述行动机器人停车等待至所述作业管制区域内不存在除所述行动机器人以外的自主移动机器人;若否,确定所述作业管制区域是否可执行作业;在所述作业管制区域可执行作业的情况下,生成所述行动机器人的执行作业指令;在所述作业管制区域不可执行作业的情况下,生成所述停车等待指令,以使得所述行动机器人停车等待至所述作业管制区域可执行作业;在所述行动机器人作业完成后,解除所述作业管制区域。
10、根据一些实施例,所述自主移动机器人包括第一行动机器人,所述行动请求包括路口通行请求;根据所述行动请求生成调度指令,包括:获取所述第一行动机器人的环境信息;在基于所述环境信息确定所述第一行动机器人行驶至距路口预设距离的情况下,根据所述路口通行请求设置所述第一行动机器人的通行管制区域;根据所述通行管制区域内的实时情况生成所述第一行动机器人的调度指令。
11、根据一些实施例,根据所述通行管制区域内的实时情况生成所述第一行动机器人的调度指令,包括:在所述通行管制区域内存在除所述第一行动机器人以外的自主移动机器人的情况下,生成所述第一行动机器人的停车等待指令;在所述通行管制区域内不存在除所述第一行动机器人以外的自主移动机器人的情况下,生成所述第一行动机器人的正常行驶指令。
12、根据一些实施例,所述自主移动机器人还包括第二行动机器人;在所述第一行动机器人正常行驶,有所述第二行动机器人进入所述第一行动机器人的通行管制区域的情况下,根据所述第二行动机器人的通行优先权生成所述第一行动机器人或所述第二行动机器人的停车等待指令,包括:在所述第二行动机器人的通行优先权高于所述第一行动机器人的情况下,生成所述第一行动机器人的停车等待指令,以使得所述第二行动机器人正常行驶;在所述第二行动机器人的通行优先权不高于所述第一行动机器人的情况下,生成所述第二行动机器人的停车等待指令,以使得所述第一行动机器人正常行驶。
13、根据一些实施例,所述方法还包括:确定所述第一行动机器人及所述第二行动机器人的状态;接收正常行驶的所述第一行动机器人或所述第二行动机器人在检测到除自身以外的自主移动机器人后停车等待并发送的恢复通行请求;在除所述第一行动机器人以外的自主移动机器人或除所述第二行动机器人以外的自主移动机器人处于停车等待状态的情况下,根据所述恢复通行请求生成所述第一行动机器人或所述第二行动机器人的正常行驶指令。
14、根据一些实施例,在所述第一行动机器人或所述第二行动机器人驶出对应的通行管制区域后,解除所述第一行动机器人或所述第二行动机器人对应的通行管制区域,以使得处于停车等待状态的所述第一行动机器人或所述第二行动机器人恢复正常行驶。
15、根据本技术的一方面,提供一种自主移动机器人的调度装置,包括:信息接收模块,接收自主移动机器人的行动请求;获取所述自主移动机器人的环境信息;数据处理模块,根据所述环境信息和所述行动请求生成对应的所述自主移动机器人的调度指令;信息发送模块,发送所述调度指令至所述自主移动机器人,以控制所述自主移动机器人的行动。
16、根据本技术的一方面,提供一种自主移动机器人,包括:车身;传感器,安装于所述车身上,用于感知所述自主移动机器人的环境信息;通信装置,上报所述环境信息至如前述的调度装置,并接收所述调度装置发送的调度指令;处理器,根据所述调度指令下发所述自主移动机器人的行动指令;驱动装置,根据所述行动指令驱动所述车身行动。
17、根据本技术的一方面,提供一种电子设备,包括:一个或多个处理器;存储装置,用于存储一个或多个程序;当所述一个或多个程序被所述一个或多个处理器执行,使得一个或多个处理器实现如前述的方法。
18、根据本技术的一方面,提供一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现如前述的方法。
19、根据本技术的实施例,可在不同种类的自主移动机器人混行的场景中,根据自主移动机器人的行动请求以及自主移动机器人的状态和所处的环境信息生成调度指令,实时控制自主移动机器人的行动,实现机器人的灵活调度,避免事故的发生,提高工作效率。
20、应当理解的是,以上的一般描述和后文的细节描述仅是示例性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!