一种中小型战术察打无人机攻击模型及方法
本发明属于察打无人机领域,涉及一种中小型战术察打无人机攻击模型及方法,更具体地说,是指一种中小型战术察打无人机攻击作战模式及方法。
背景技术:
1、察打无人机目前在世界上应用越来越广泛,几乎所有的冲突中都能看到察打无人机的身影。通常察打无人机的攻击目标分成两类:固定目标和移动目标。
2、常见的察打无人机以大型无人机为主,无人机装备有专门的侦察稳瞄设备,并配以专门的火控计算机系统和飞控计算机相辅助,以完成发现目标到引导机载武器系统攻击的目的;大型察打无人机由于其飞行高度高、侦察稳瞄设备探测距离远、导弹射程远的特点,完成对固定和移动目标攻击较为容易,但该方法显著增加了系统规模,成本昂贵。
3、近几年来的几次地区冲突证明,中小型战术察打无人机(全机重量小于600kg)以其“成本低”、“效费比高”的优势越来越受到大家的关注;但是中小型战术察打无人机存在“侦察距离近、导弹射程近、飞行速度慢的缺点,并需满足针对时敏目标发现需更快捷、响应时间需更短”的要求;所以需要一种针对中小型战术察打无人机的特定攻击作战模式及方法完成针对固定和移动目标的攻击,使其在解决上述不足的同时提高攻击效率,满足作战要求。
技术实现思路
1、要解决的技术问题
2、为了避免现有技术的不足之处,本发明提出一种中小型战术察打无人机攻击模型及方法,该方法能够针对不同目标(固定及移动目标)进行攻击,充分发挥中小型战术察打无人机的优势,提高察打无人机发现目标到打击目标的决策效率及目标命中概率。
3、技术方案
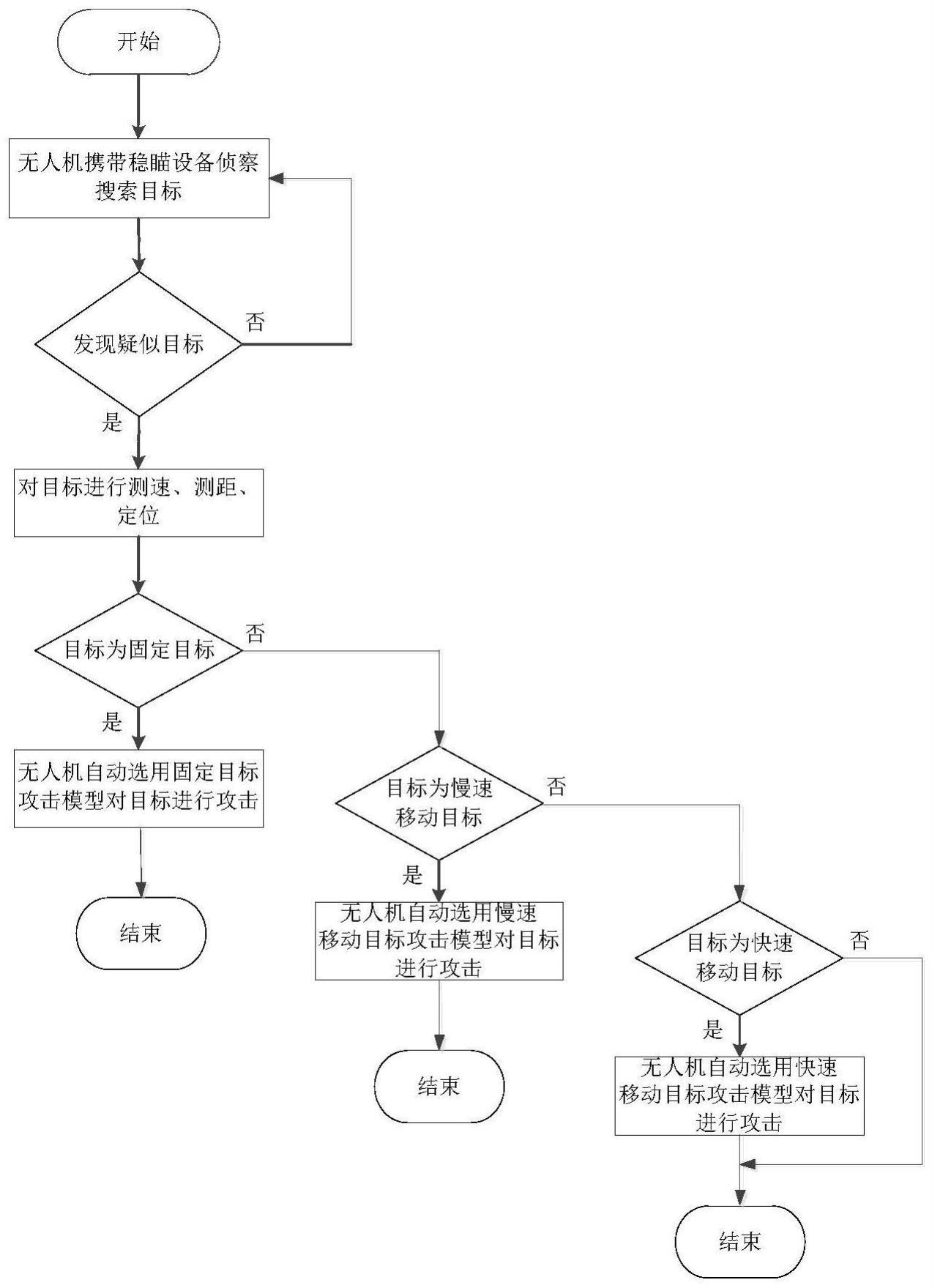
4、一种中小型战术察打无人机攻击模型,其特征在于:攻击目标包括固定目标和移动目标;所述固定目标的攻击模型是以固定目标为中心,侦察阶段在固定目标上方进行圆盘旋飞行,满足攻击条件时启动发射导弹;所述移动目标的攻击模型是以移动目标为行进主方向,侦察阶段在移动目标后上方改变飞行角度进行跟随飞行,确认目标后改为直线飞行,在满足攻击条件时启动发射导弹。
5、所述移动目标包括慢速移动目标或快速移动目标;所述慢速移动目标是:移动目标的移动速度小于无人机最小巡航速度的60%;所述快速移动目标是:移动目标的移动速度大于无人机最小巡航速度的60%且小于最小巡航速度。
6、所述移动目标为慢速移动目标时,侦察阶段改变飞行角度进行跟随飞行的飞行轨迹为沿着飞行方向的“螺旋线”轨迹。
7、所述“螺旋线”由多个重叠的圆组成,圆心在以无人机当前位置与目标连线上,圆的半径为无人机最小盘旋半径*(无人机最小巡航速度的60%/目标速度);此时无人机的速度为:(目标速度/无人机最小巡航速度的60%)*无人机最大巡航速度,此时无人机速度不得小于无人机最小巡航速度。
8、所述移动目标为快速移动目标时,侦察阶段改变飞行角度进行跟随飞行的飞行轨迹为沿着飞行方向的“之字”轨迹。
9、所述“之字”航线的角度为:以当前飞机与目标连线为0°,与其成45°的直线;此时无人机的速度为:(无人机最小巡航速度/(2/3)),此时无人机速度不得大于无人机最大巡航速度;每一根之字航线长度为无人机进入第一根之字航线的起始点与目标的距离的1/3。
10、一种实现所述中小型战术察打无人机攻击模型的攻击方法,其特征在于所述固定目标的攻击方法步骤如下:
11、步骤a1:无人机由地面控制站控制起飞,飞往指定区域;无人机上的光电吊舱对疑似固定目标进行定位,将侦察画面及目标信息经地面控制站传输至地面指挥所,指挥员根据侦察画面进行判断是否为疑似目标,如不是则继续侦察;
12、步骤a2:当判断为疑似固定目标时,地面站控制无人机以疑似固定目标为中心进行圆盘旋飞行,无人机对疑似目标进行测距及目标定位,同时地面站根据传回的目标信息进行目标确认;所述圆盘半径为导弹最大射程的m倍;
13、步骤a3:如目标确认无误,以无人机当前位置到目标位置连线为规划攻击航线,无人机按程控航线模式向规划航线切入,并保持定高、航线程控模式向目标稳定飞行,控制侦察稳瞄设备瞄准目标;
14、步骤a4:进入导弹射程且满足导弹发射条件后择机发射导弹,如无人机直到进入导弹射程盲区依然无法发射导弹则返回步骤a2。
15、一种实现所述中小型战术察打无人机攻击模型的攻击方法,其特征在于所述慢速移动目标的攻击方法步骤如下:
16、步骤b1:无人机由地面控制站控制起飞,飞往指定区域进行侦察,无人机上的光电吊舱对疑似移动目标进行定位、测速,将侦察画面及目标信息经地面控制站传输至地面指挥所,指挥员根据侦察画面进行判断是否为疑似慢速移动目标,如不是则继续侦察;
17、步骤b2:当判断为疑似慢速移动目标时,地面站控制无人机以“螺旋线”轨迹对目慢速移动标进行跟踪,离目标最近点为侦察稳瞄设备最远侦察距离减去n公里,跟踪过程中无人机对疑似目标进行测距及目标定位,同时指挥员根据传回的目标信息进行疑似慢速移动目标确认;所述侦察稳瞄设备最远侦察距离为该螺旋线轨迹离目标最远点;
18、步骤b3:慢速移动目标确认无误时,以目标移动方向为航线方向,目标当前时刻位置为端点,目标移动方向的反方向与无人机螺旋线轨迹的交点为起点构建规划攻击航线,无人机按程控航线模式向规划攻击航线切入,并保持定高、航线程控模式向目标稳定飞行,控制侦察稳瞄设备瞄准目标;
19、步骤b4:进入导弹射程且满足导弹发射条件后择机发射导弹,如无人机直到进入导弹射程盲区依然无法发射导弹则返回步骤b2。
20、一种实现所述中小型战术察打无人机攻击模型的攻击方法,其特征在于所述快速移动目标的攻击方法步骤如下:
21、步骤c1:无人机由地面控制站控制起飞,飞往指定区域进行侦察,无人机上的光电吊舱对疑似移动目标进行定位、测速,将侦察画面及目标信息经地面控制站传输至地面指挥所,指挥员根据侦察画面进行判断是否为疑似快速移动目标,如不是则继续侦察;
22、步骤c2:当判断为疑似快速移动目标时,地面站控制无人机以“之字”轨迹对目标进行跟踪,该“之字”轨迹离目标最远点为侦察稳瞄设备最远侦察距离,离目标最近点为侦察稳瞄设备最远侦察距离减去n公里,跟踪过程中无人机对疑似目标进行测距及目标定位,同时指挥员根据传回的目标信息进行目标确认;
23、步骤c3:如目标确认无误,以目标移动方向为航线方向,目标当前时刻位置为端点,目标移动方向的反方向与无人机“之字”航线的交点为起点构建规划攻击航线,无人机按程控航线模式向规划攻击航线切入,并保持定高、航线程控模式向目标稳定飞行,控制侦察稳瞄设备瞄准目标;
24、步骤c4:进入导弹射程且满足导弹发射条件后择机发射导弹,如无人机直到进入导弹射程盲区依然无法发射导弹则返回步骤c2。
25、有益效果
26、本发明提出的一种中小型战术察打无人机攻击模型及方法,其特征在于:攻击目标包括固定目标和移动目标;所述固定目标的攻击模型是以固定目标为中心,侦察阶段在固定目标上方进行圆盘旋飞行,满足攻击条件时启动发射导弹;所述移动目标的攻击模型是以移动目标为行进主方向,侦察阶段在移动目标后上方改变飞行角度进行跟随飞行,确认目标后改为直线飞行,在满足攻击条件时启动发射导弹。
27、本发明提出的中小型战术察打无人机攻击模型和攻击过程中的控制方法具有以下优点:
28、1、针对中小型战术察打无人机中侦察稳瞄设备侦察距离近、导弹射程近的缺点,针对固定目标、慢速移动目标和快速移动目标分别设计了攻击模型及控制方法,较好的涵盖了实战中的攻击场景及模式,充分发挥了无人机系统的性能,显著降低无人机在攻击阶段的操作难度,同时系统作战管理工作的难度也显著降低;
29、2、本攻击模型和攻击过程中控制方法的发明使得操纵手从攻击段繁琐的操作中解脱出来,模型采用三种状态模块化设计,条件选择简单方便,显著提高了系统作战的效率和成功率;
30、3、本发明完全由无人机软件完成,未在无人机增加额外设备;
31、4、本发明策略实现简单,适用面广可以在不同无人机系统中推广应用。
- 还没有人留言评论。精彩留言会获得点赞!