一种基于参数整定的非最小相位对象鲁棒滤波控制方法
本发明涉及非最小相位对象控制,尤其涉及一种基于参数整定的非最小相位对象鲁棒滤波控制方法。
背景技术:
1、具有右半复平面零点或极点的对像属于非最小相位对象。非最小相位对象在能源系统中广泛存在,热工对象当中的锅炉汽包水位、锅炉主汽压对象,水力发电中的水轮机调速系统等都是典型的非最小相位环节。纯迟延环节用pade近似或者泰勒级数展开,就会发现具有右半平面的零点存在,也是一类非最小相位对象。
2、现有技术工程应用中,对于非最小相位的控制仍是以pid控制为主,这是由pid控制突出的鲁棒性能和在dcs中方便、成熟的组态技术决定的。在非最小相位对象的控制中,为了克服由不稳定零点引起的负调,往往会牺牲系统的响应速度,降低系统的控制品质,在实际工程应用中,负调的出现也会对操作人员进行误导,引起不必要甚至错误的人工干预。普通的pid控制虽然可以实现非最小相位对象的无差控制,但是难以获得能够满足工程需要的控制品质。
3、中国专利公开号:cn 112051739公开了一种非最小相位系统的闭环频域辨识方法、系统及计算机可读存储介质,能够精确的辨识获取包含非最小相位过程对象的模型,提出了一种新的针对非最小相位系统的闭环频域辨识方法。但是没有克服系统由不稳定零点引起的负调。
技术实现思路
1、为此,本发明提供一种基于参数整定的非最小相位对象鲁棒滤波控制方法,一方面确保非最小相位系统的输出跟踪能力,又兼顾过程的稳定性;另一方面,在克服系统负调的同时,还尽量提高系统的响应速度以满足工程应用的需求。本发明有效的克服现有技术中非最小相位对象的控制系统由不稳定零点引起的负调的问题,同时提高了系统的响应速度以满足工程应用的需求。
2、为实现上述目的,本发明一种基于参数整定的非最小相位对象鲁棒滤波控制方法,其特征在于,包括:
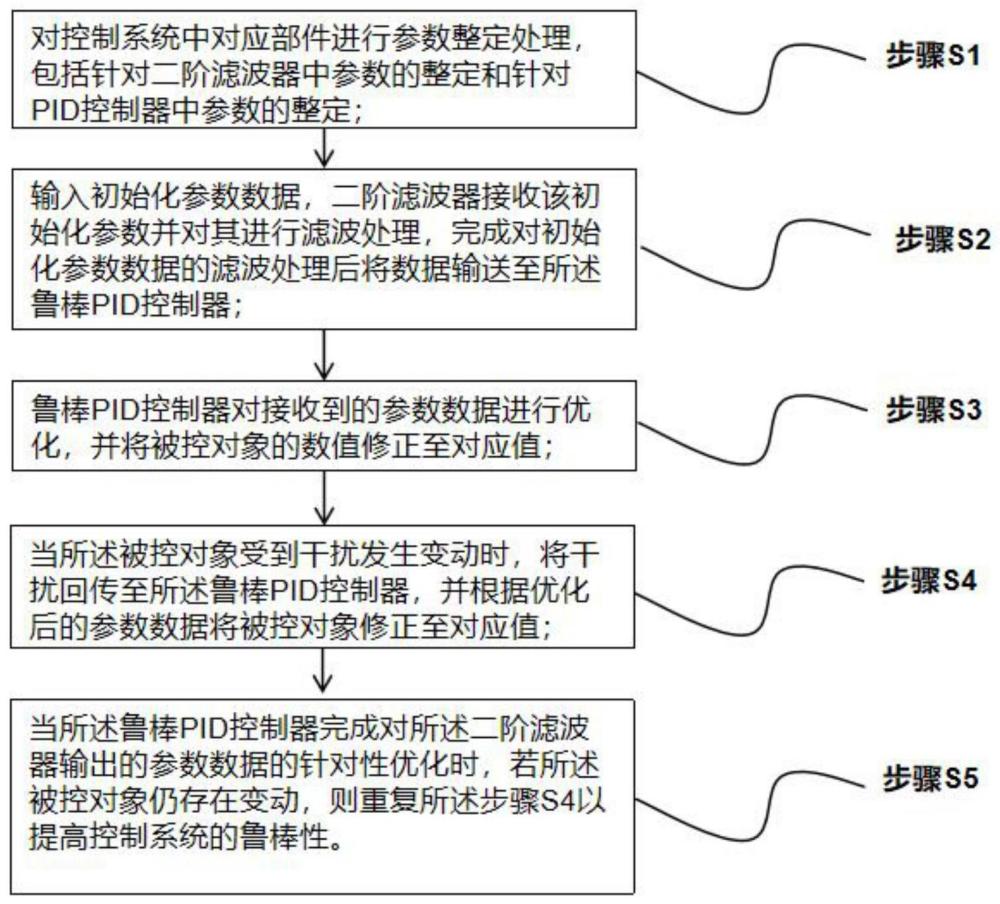
3、步骤s1,对控制系统中对应部件进行参数整定处理,包括针对二阶滤波器中参数的整定和针对pid控制器中参数的整定,将参数整定后的pid控制器记为鲁棒pid控制器;
4、步骤s2,输入初始化参数数据,所述二阶滤波器接收该初始化参数并对其进行滤波处理以消除初始化参数数据中的噪音,二阶滤波器在完成对初始化参数数据的滤波处理后将滤波后的参数数据输送至所述鲁棒pid控制器;
5、步骤s3,所述鲁棒pid控制器对接收到的参数数据进行优化,并根据优化后的参数数据将被控对象的数值修正至对应值;
6、步骤s4,当所述被控对象受到干扰发生变动时,将干扰回传至所述鲁棒pid控制器,所述鲁棒pid控制器使用h∞控制以根据接收到的干扰对所述二阶滤波器输出的参数数据进行针对性优化,并根据优化后的参数数据将被控对象修正至对应值;
7、步骤s5,当所述鲁棒pid控制器完成对所述二阶滤波器输出的参数数据的针对性优化时,若所述被控对象仍存在变动,则重复所述步骤s4以提高控制系统的鲁棒性。
8、进一步地,在所述步骤s1中,对所述pid控制器进行参数整定前,所述pid控制器的模型c(s)如下:
9、
10、其中,kc为pid控制器比例增益,ki为积分增益,kd为微分增益,td为pid控制器微分时间。
11、进一步地,对所述pid控制器进行参数整定时,令所述二阶滤波器模型f(s)=1,并以此为基准完成对鲁棒pid控制器的参数整定,在整定过程中,令表征所述控制系统鲁棒性能的补灵敏度函数t等于控制系统的期望闭环传递函数,并依据该期望闭环传递函数的性能参数完成对所述c(s)模型中各项参数的整定,其中,期望闭环传递函数的性能参数包括性能指标衰减率最大超调量mp、上升时间tr、调节时间ts、峰值时间tp以及稳态误差ess。
12、进一步地,通过使用时间与绝对误差乘积积分指标作为系统的目标函数以整定所述c(s)模型中的各项参数,设定时间与绝对误差乘积积分指标i tae如下:
13、
14、其中,e(t)为闭环系统输出与设定值之间的偏差。
15、进一步地,所述步骤s4中,所述鲁棒pid控制器使用h∞控制对所述二阶滤波器输出的参数数据进行针对性优化的过程包括:
16、步骤s41,将所述控制系统中出现的干扰d与控制系统内的设定值r结合以生成偏差信号,将偏差信号分两路输出,一路偏差信号经第一性能加权函数w1加权后形成偏差性能信号z1输出;
17、步骤s42,另一路所述偏差信号输送至所述鲁棒pid控制器,鲁棒pid控制器对偏差信号进行优化以得到调节信号,将调节信号分两路输出,一路调节信号经第二性能加权函数w2加权后形成调节性能信号z2输出;
18、步骤s43,另一路所述调节信号输送至所述被控对象,根据调节信号将被控对象修正至对应值,并输出执行信号,执行信号经第三性能加权函数w3加权后形成执行机构输出性能信号z3输出。
19、进一步地,设定灵敏度函数其中,g为被控对象,k为所述pid控制器模型,k=c(s),设定所述补灵敏度函数t=1-s。
20、进一步地,所述参数整定后的鲁棒pid控制器满足
21、
22、其中,r=sk。
23、进一步地,若所述被控对象包括纯迟延环节e-τs,使用超前环节确定各所述加权函数,对于第i加权函数wi,i=1,2,设定:
24、
25、其中,mi和ni均为常数且mi>ni。
26、进一步地,若所述被控对象包括纯迟延环节e-τs,使用常数确定各所述加权函数,对于第i加权函数wi,i=1,2,设定wi(s)=mi。
27、进一步地,在所述步骤s1中,参数整定后的二阶滤波器模型f(s)如下:
28、
29、其中,ma是用以表征所述控制系统跟踪加速度信号的加速度误差系数,mb是用以表征所述控制系统斜坡信号的速度误差系数,mc是用以表征所述控制系统跟踪加速度信号的位置误差系数,各误差系数依据控制系统所期望的输出稳态误差、所述上升时间tr或延迟时间td求得。
30、与现有技术相比,本发明的有益效果在于,不仅,设计鲁棒pid控制器确保系统闭环稳定,实现系统无差控制,提高系统的稳定性,同时克服克服系统由不稳定零点引起的负调;而且,在参考输入端设计二阶滤波器,同时逐步加入系统位置误差、速度误差和加速度误差信息,以加快系统响应速度,获得期望的动态品质。本发明提出的方法在有效抑制系统负调的同时,进一步提高了系统的响应速度,缩短了系统调节时间,改善了非最小相位系统的控制品质。该方法易于实现、方便在dcs中组态,参数整定简单,值得在工程应用中推广。
31、进一步地,非最小相位对象的控制方法采用普通pid控制器,普通的pid控制虽然可以实现非最小相位对象的无差控制,保证负调的情况下,需要牺牲相应速度需求;保证速度快的情况下,需要牺牲负调需求。
32、进一步地,令所述二阶滤波器模型f(s)=1的情形下,并以此为基准完成对鲁棒pid控制器的位置参数整定,它对系统动态特性的改善有限,尽管还有一定的滞后。
33、进一步地,通过使用时间与绝对误差乘积积分指标作为系统的目标函数以整定所述c(s)模型中的各项参数,有效的提高了突出系统的响应速度,缩短了系统的调节时间,进一步改善了非最小相位系统的控制品质。
34、进一步地,使用h∞控制针对最大程度的模型不确定性进行控制器的优化设计。当控制对象参数发生大范围跃变时,可以有效的保证控制系统的鲁棒性。有效抑制系统负调的同时,进一步提高了系统的响应速度,缩短了系统调节时间,改善了非最小相位系统的控制品质。
35、进一步地,设定灵敏度函数,针对系统受到的最强干扰和最大程度的模型不确定性进行控制器的优化设计,有效抑制系统负调的同时,进一步提高了系统的响应速度,缩短了系统调节时间,改善了非最小相位系统的控制品质。
36、进一步地,合理整定的pid控制器参数,使得系统闭环稳定,实现系统无差控制,提高系统的稳定性,同时克服克服系统由不稳定零点引起的负调。
37、进一步地,非最小相位被控对象包括纯迟延环节e-τs,使用超前环节确定各所述加权函数,有效的抑制系统负调的同时,进一步提高了系统的响应速度,缩短了系统调节时间,改善了非最小相位系统的控制品质。
38、进一步地,若所述被控对象包括纯迟延环节e-τs,使用常数确定各所述加权函数,对于第i加权函数wi,i=1,2,设定wi(s)=mi,有效的抑制系统负调的同时,进一步提高了系统的响应速度,缩短了系统调节时间,改善了非最小相位系统的控制品质。
39、进一步地,参数整定后的二阶滤波器模型f(s),位置误差滤波器对系统动态特性的改善有限,而且还有一定的滞后。滤波器中加入了速度项之后,系统的响应速度明显加快,动态特性得到了显著的改善。滤波器中再次加入误差加速度项之后,系统的响应速度进一步加快,动态特性得到进一步改善。开始阶段的微小负调,也是系统提高响应速度的结果。有效的抑制系统负调的同时,进一步提高了系统的响应速度,缩短了系统调节时间,改善了非最小相位系统的控制品质。
- 还没有人留言评论。精彩留言会获得点赞!