基于改进Transformer的卫星相对位姿预测方法
本发明涉及一种基于改进transformer的卫星相对位姿预测方法,适用于太空紧急事件处置过程中服务航天器敏捷机动控制时的相对位置姿态运动预测,属于航空航天。
背景技术:
1、随着航天任务的复杂化、多样化和频繁化,航天器在寿命周期内常常需要处理多种由自身或外界因素引起的紧急事件。例如在发射阶段卫星没有正常入轨、在轨期间航天器出现故障、寿命末期航天器燃料耗尽等。为降低以上三个不同阶段的太空紧急事件带来的影响和损失,需要服务航天器分别进行辅助入轨操作、故障在轨修复、燃料在轨加注等操作。这三类应急救援任务的共同点是服务航天器需要进行敏捷机动控制实现与目标航天器的对接或抓取。同时,对接或抓取的目标都是目标航天器上某一目标点,服务航天器则是使用执行机构进行最终抓取或对接。由于待救援的卫星一般都是姿轨控失效的状态,卫星自身可能有一个较大的自旋角速度。而服务航天器需要从远距离处快速机动到目标航天器附近,还要准确实现执行机构与目标航天器上目标点的对接或抓捕。因此,对应急救援服务航天器的研制来说,首要解决的是航天器的空间敏捷姿态机动控制技术相关理论和难题。
2、空间敏捷姿态机动控制技术的一大难点在于快速随动下的姿轨耦合控制。由于目标航天器可能具有较快的旋转角速度,使得服务航天器执行机构对于抓捕位置的可跟踪窗口较短且姿轨耦合特性较强,很可能无法在跟踪窗口内完成跟踪随动任务(黄镜霖.在轨维护任务中近距离接近与捕获运动规划研究[d].哈尔滨理工大学,2023.doi:10.27063/d.cnki.ghlgu.2023.000224.)。解决这一问题的有效方法是利用前期对失效翻滚目标的观测信息进行目标运动的提前预测,使得服务航天器在进入跟踪窗口前提前起旋。
3、针对失效翻滚目标进行运动预测共有三类方法。第一类为基于动力学递推的方法,该类方法利用动力学模型与控制律,以基于当前状态的递推方式给出运动预测。该种方法由于难以平衡动力学准确性与计算速率而难以做到快速精确地运动预测。第二类方法为基于信息融合的预测方法,以滤波算法为主(穆清涛.空间运动目标自主捕获路径规划研究[d].哈尔滨工业大学,2014.)。由于滤波算法的理论基础为线性高斯系统,对非线性、非高斯的系统效果难以保障且滤波算法对先验信息准确性和计算量要求高。在空间失效翻滚目标运动预测方面,滤波算法难以做到实时准确预测。第三类为基于人工智能技术的运动预测方法。运动预测问题属于时序问题,以往常用网络结构为rnn和lstm。由于rnn和lstm架构需要时序训练,无法做到并行计算,因此需要大量训练时间,且训练结果难以保证(黄镜霖.在轨维护任务中近距离接近与捕获运动规划研究[d].哈尔滨理工大学,2023.doi:10.27063/d.cnki.ghlgu.2023.000224.)。随着大语言模型的兴起,能够并行计算的基于transformer架构的网络结构被广泛关注。同时,由于transformer架构的大模型需要大量计算资源,有着训练成本过高的问题。本方法提出了基于改进transformer的卫星相对位姿预测方法,在transformer架构的基础上改进了模型输入输出数据结构并通过并联网络的方式达到了低成本快速学习的卫星相对运动位姿预测。
技术实现思路
1、本发明公开的基于改进transformer的卫星相对位姿预测方法要解决的技术问题是:在服务航天器敏捷机动控制过程中提供针对目标航天器上目标点的相对位姿运动预测,建立精确的非质心间相对运动动力学并收集相对运动位姿数据,将相对运动位姿数据进行分层处理以建立两个针对相对运动姿轨信息预测改进transformer网络模型不同子网络的训练集,建立相对运动姿轨信息预测改进transformer网络模型并进行训练,利用已有目标信息完成未来一段时间内的运动预测,即基于改进transformer实现对卫星相对位姿预测。本发明具有高时效性,高准确性,低计算量的优点。
2、本发明的目的是通过下述技术方案实现的:
3、本发明公开的基于改进transformer的卫星相对位姿预测方法,通过建立描述服务航天器执行机构与目标航天器上目标点姿轨耦合相对运动的非质心间相对运动方程组;通过收集考虑不同初始相对位置相对姿态的相对姿轨信息序列并进行分层处理以建立针对相对运动姿轨信息预测改进transformer网络模型不同子网络的训练集;通过建立相对运动姿轨信息预测改进transformer网络模型;训练相对运动姿轨信息预测改进transformer网络模型;使用相对运动姿轨信息预测改进transformer网络模型,进行服务航天器与目标点的姿轨耦合相对运动预测。
4、本发明公开的基于改进transformer的卫星相对位姿预测方法,包括如下步骤:
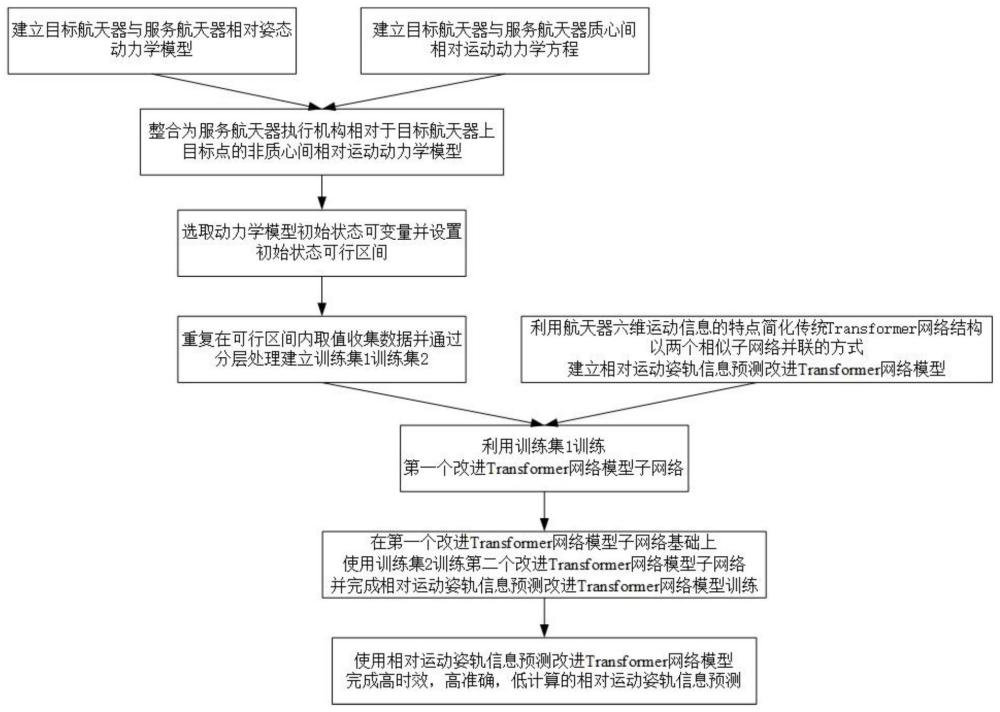
5、步骤一:建立目标航天器与服务航天器相对姿态运动动力学模型,建立目标航天器与服务航天器质心间相对运动动力学方程,将相对姿态运动模型与质心间相对运动方程整合为服务航天器执行机构相对于目标航天器上目标点的非质心间相对运动动力学模型。
6、目标航天器与服务航天器相对姿态运动模型表示为:
7、
8、其中qc=[qc0 qc1 qc2 qc3]t代表目标航天器的姿态四元数,代表目标航天器的姿态四元数变化率,定义ζc=[qc1 qc2 qc3]t为姿态四元数的矢部,ωc为目标航天器的旋转角速度,jc为目标航天器的转动惯量,下标bc为目标航天器的本体坐标系(x,y,z轴与惯性主轴重合)下表示变量的标识,为目标航天器旋转角速度在本体坐标系下的表达,,为目标航天器旋转角加速度在本体坐标系下的表达,上标×代表变量的叉乘矩阵,代表目标航天器的重力梯度力矩。另外ξ(q)函数表达式如下:
9、
10、服务航天器的运动及姿态动力学方程为:
11、
12、其中qd=[qd0 qd1 qd2 qd3]t代表服务航天器的姿态四元数,代表服务航天器的姿态四元数变化率,定义ζd=[qd1 qd2 qd3]t为姿态四元数的矢部,ωd为服务航天器的旋转角速度,jd为服务航天器的转动惯量,下标bd为服务航天器的本体坐标系(x,y,z轴与惯性主轴重合)下表示变量的标识,为服务航天器旋转角速度在本体坐标系下的表达,,为服务航天器旋转角加速度在本体坐标系下的表达,上标×代表变量的叉乘矩阵,代表服务航天器的重力梯度力矩,为服务航天器的控制力矩。
13、服务航天器相对于目标航天器的相对姿态动力学为:
14、
15、其中为服务航天器相对于目标航天器的质心间相对姿态角加速度,为服务航天器相对于目标航天器的质心间相对姿态角速度,变量左上角坐标系标识代表该变量表示的坐标系,右下角坐标系标识代表该变量是某个坐标系的变量。上式中涉及的旋转矩阵表达式如下所示,其中rc与为目标航天器在惯性系下位置与速度矢量。
16、
17、
18、
19、
20、
21、
22、
23、
24、目标航天器与服务航天器质心间相对运动动力学方程描述在目标航天器轨道坐标系lc下,即x轴沿轨道半径指向外,z轴垂直轨道平面,y轴与另外两轴构成右手系,表达式如下所示:
25、
26、其中ρ、为相对运动位置、速度、加速度量,表示目标航天器轨道角加速度,μ为地球引力常数,r为对应航天器位置标量,∑f表示卫星本体系下合力。
27、服务航天器执行机构相对于目标航天器上目标点的非质心间相对运动动力学模型如下所示:
28、
29、其中上下标i代表服务航天器执行机构,j代表目标航天器对接机构,即为服务航天器对接执行机构与目标航天器对接点的相对位置在目标航天器轨道坐标系下的表达,为服务航天对接执行机构相对服务航天器质心的位置,pcj为目标航天对接点相对目标航天器质心的位置。替换为:
30、
31、
32、式(14)即为服务航天器执行机构与目标航天器上目标点的非质心间耦合动力学模型。
33、步骤二:设置服务航天器与目标航天器相对姿态与轨道初始状态可行区间;在可行区间内重复随机取值以初始化航天器相对姿轨状态并调用步骤一所建立的服务航天器执行机构与目标航天器上目标点的非质心间耦合动力学模型进行动力学递推,记录服务航天器执行机构与目标航天器对接点之间的非质心相对位置与相对旋转角速度通过对所收集的信息进行分层处理,建立训练数据集。
34、步骤2.1根据相对动力学运动特性划定服务航天器与目标航天器相对姿态与轨道初始状态可行区间。选取目标航天器轨道六根数、目标航天器姿态旋转角速度、服务航天器质心与目标航天器质心间相对位置、服务航天器执行机构相对标航天器对接机构的初始位置、服务航天器姿态旋转角速度作为可变量,针对所述变量划定可行区间。
35、步骤2.2将目标航天器轨道六根数、目标航天器姿态旋转角速度、服务航天器质心与目标航天器质心间相对位置、服务航天器执行机构相对标航天器对接机构的初始位置、服务航天器姿态旋转角速度在其对应的可变区间内随机取值,初始化服务航天器与目标航天器初始状态,利用步骤一中所建立的服务航天器执行机构与目标航天器上目标点的非质心间耦合动力学模型进行动力学递推,记录α+β长度的非质心相对位置与相对旋转角速度信息,其中α与β均为常数,决定预测的运动信息长度。重复进行状态初始化、动力学递推与信息记录γ次,其中γ为期望的训练集数据数量。
36、步骤2.3针对步骤2.2中所记录的非质心相对位置与相对旋转角速度信息进行分层处理,形成两个训练数据集。所谓分层处理,即将所记录信息中前α长度的非质心相对位置与相对旋转角速度作为训练输入量,并将信息后β长度的非质心相对位置作为训练目标量,建立训练集1,但同时,训练集1也要记录信息后β长度的相对旋转角速度作为步骤4.2中第一次训练时的目标输出;将所记录信息中前α长度的非质心相对位置与相对旋转角速度作为训练输入量,并将信息后β长度的相对旋转角速度作为训练目标量,建立训练集2。与传统transformer架构所需的训练集不同,训练集1与训练集2不进行预测开始与预测结束的数据标定,这使得相对运动姿轨信息预测改进transformer网络模型不需要识别预测开始或结束,将导致模型规模需求的减小。
37、步骤三:针对transformer架构进行改进以建立相对运动姿轨信息预测改进transformer网络模型。利用航天器六维运动信息的特点,简化网络结构;同时以两个相似子网络并联的方式进行整体网络搭建,通过两个子网络分别对位置信息与姿态信息的拟合将网络结构扁平化,利用航天器相对运动轨道变化与姿态变化频率不一致的特点简化网络结构,避免使用过深网络结构导致的训练不稳定与对复杂姿轨信息同时拟合的需求导致模型规模扩大。
38、步骤3.1针对单一子网络进行基于transformer架构的网络结构改进。首先,建立标准transformer模型,以便在此基础上进行改进。第一步,取消原架构中的embeding操作,将每一时刻的六维相对位置、姿态信息视为一个信息点z,并将具体的相对位置值与相对姿态值作为信息点的具体数值作为编码器与解码器的输入。下标r标明了相对位置量,ω标明了相对姿态量。在此基础上,将解码器输出时的sigmoid层换为全连接层,使得改进transformer网络模型子网络能够输出准确的数字信息而不是概率信息。最后,将解码器第一层掩码多头自注意力层的前馈操作取消,实现杜绝学习过程中目标输出数据对学习过程产生影响,增加网络使用过程中的准确性。
39、步骤3.2建立两个步骤3.1中改进transformer网络模型子网络,将两个子网络并联,取第一个改进transformer网络模型子网络输出的前三维与第二个改进transformer网络模型子网络输出的后三位,组成相对运动姿轨信息预测改进transformer网络模型的输出。其中,第一个改进transformer网络模型子网络输出的前三维为拟合的相对运动位置信息,第二个改进transformer网络模型子网络输出的后三维信息为拟合的相对姿态运动信息。通过建立两个子网络并进行并联的操作,避免单一网络结构对频率不同的位置、姿态信息同时拟合导致的模型规模扩大与训练不稳定。
40、步骤四:利用步骤2.3建立的训练集1训练第一个改进transformer网络模型子网络,使得第一个改进transformer网络模型子网络具备根据α长度的相对运动位置信息与相对姿态信息拟合β长度的相对运动位置信息的能力,即能够对轨道运行趋势与姿态对轨道的耦合影响进行拟合。在此基础上,第一个改进transformer网络模型子网络中的自注意力机制已经较好的学习了位置与姿态之间的权重关系,使用训练集2在已经训练好的第一个改进transformer网络模型子网络基础上进行训练,获得第二个改进transformer网络模型子网络,使得第二个改进transformer网络模型子网络具备根据α长度的相对运动位置信息与相对姿态信息拟合β长度的相对姿态位置信息的能力,即能够对姿态运动趋势进行预测,即训练得到的相对运动姿轨信息预测改进transformer网络模型。
41、步骤4.1使用归一化方法对训练集数据进行归一化处理。训练集由三维位置量与三维姿态量组成,针对每一维度信息分别进行归一化处理,归一化操作如下所示:
42、
43、其中zi为训练集第i维的数据,下标min为训练集维度的数据最小值,max代表训练集维度的数据最大值,new代表归一化后数据。
44、步骤4.2针对第一个改进transformer网络模型子网络,使用步骤2.3建立的训练集1进行训练。该训练集数据的输入规模为α×6,输出规模为β×6,在计算损失时,使用全部六维数据进行计算,以确保子网络对位置姿态权重信息进行准确学习,在此基础上,利用训练集1再次进行训练,但此次训练计算损失时,使用前三维数据进行计算,即β×3规模的目标输出与网络输出的前三维数据进行计算,以达到网络只对相对运动位置信息进行拟合的目的。在此基础上,选择合适的学习率,批学习数目,选择l1损失函数进行训练,并将模型保存。
45、步骤4.3针对第二个改进transformer网络模型子网络,使用步骤2.3建立的训练集2对步骤4.2中已经训练好的第一个改进transformer网络模型子网络进行训练。该训练集数据的输入规模为α×6,输出规模为β×6,但在计算损失时,使用后三维数据进行计算,即β×3规模的目标输出与网络输出的后三维数据进行计算,以达到网络只对相对运动姿态信息进行拟合的目的。在此基础上,选择合适的学习率,批学习数目,选择l1损失函数进行训练,并将模型保存。
46、步骤4.4将步骤4.2、4.3中训练完成的第一个、第二个改进transformer网络模型子网络进行并联,使得两网络具备同样的输入,同时能够利用两网络输出组合成相对运动姿轨信息预测改进transformer网络模型输出,组成相对运动姿轨信息预测改进transformer网络模型,即训练得到的相对运动姿轨信息预测改进transformer网络模型。
47、步骤五:使用步骤四训练得到的相对运动姿轨信息预测改进transformer网络模型,进行服务航天器执行机构相对于目标航天器对接目标点的非质心间相对运动预测,根据α步长的观测相对运动姿轨信息预测未来β步长的相对运动姿轨信息,即基于改进transformer实现对卫星相对位姿预测。
48、有益效果:
49、1、本发明公开的基于改进transformer的卫星相对位姿预测方法,通过建立描述服务航天器执行机构与目标航天器上目标点姿轨耦合相对运动的非质心间相对运动方程组,并利用航天器姿态与轨道变化频率不同建立相对运动姿轨信息预测改进transformer网络模型对服务航天器执行机构与目标航天器上目标点姿轨耦合相对运动的非质心间相对运动进行拟合,给复杂且快速运动的航天器超近距离姿轨耦合运动预测提供了方法。
50、2、本发明公开的基于改进transformer的卫星相对位姿预测方法,利用航天器六维运动信息的特点,简化网络结构;同时以两个相似子网络并联的方式进行整体网络搭建,通过两个子网络分别对位置信息与姿态信息的拟合将网络结构扁平化,利用航天器相对运动轨道变化与姿态变化频率不一致的特点简化网络结构,避免使用过深网络结构导致的训练不稳定与对复杂姿轨信息同时拟合的需求导致模型规模扩大。
51、3、本发明公开的基于改进transformer的卫星相对位姿预测方法,通过固定预测步长的方式避免了训练集预测开始与预测结束的数据标定,使得相对运动姿轨信息预测改进transformer网络模型不需要识别预测开始或结束,将导致模型规模需求的减小,进一步减小预测用时,降低在轨服务过程中的姿轨控制难度。
52、4、本发明公开的基于改进transformer的卫星相对位姿预测方法,进行第一个改进transformer网络模型子网络训练,在此基础上,第一个改进transformer网络模型子网络中的自注意力机制已经较好的学习了位置与姿态之间的权重关系,使用训练集2在已经训练好的第一个改进transformer网络模型子网络基础上进行训练,避免两个子网络对类似数据进行重复训练,提高对transformer网络模型的训练效率。
- 还没有人留言评论。精彩留言会获得点赞!