基于5G的智能仓储异常监测方法及系统与流程
本发明涉及智能仓储,具体为基于5g的智能仓储异常监测方法及系统。
背景技术:
1、工业互联网技术的不断发展,使仓储管理对自动化、智能化的需求越来越高。物资对于仓储环境有着实实在在的要求,一方面,有些物资(譬如,冷鲜、药品、生化物等),当温度、湿度、气压一旦超出限值,物资就容易变质;另一方面,有些物资在某些环境下(譬如,温度、氧浓度),变得易燃易爆,存在安全隐患。仓储环境监测主要是通过传感器和高清摄像头来实现,但是二者均有不足之处:传感器通常被设置于一个固定的位置,仅能够采集所处空间内的环境信息的时序数据;高清摄像头在获取图像时,可能会由于货架的阻挡不能及时的拍摄异常图片。
2、基于上述问题,车间内通常还会配置仓储巡检机器人。仓储巡检机器人是一种自动化设备,主要用于仓库的巡检和安全管理。它通常配备了多种传感器和摄像头,可以自动巡视仓库,监测环境状况,并及时发现潜在的风险。仓储巡检机器人通常采用以下技术:导航技术:激光slam、视觉slam等技术,实现机器人自主导航和定位。传感器技术:温度传感器、湿度传感器、烟雾传感器、气体传感器等,用于环境监测。图像识别技术:摄像头和图像识别算法,用于识别安全隐患、资产信息等。数据分析技术:大数据分析技术,对采集的数据进行分析,发现潜在风险和优化管理策略。
3、但是现有的仓储巡检机器人通常只能对其行驶路径空间内的环境信息进行采集,无法对异常情况在空间内的扩散情况进行判断,同时现有的巡检机器人在发现异常时,自身不能对异常区域进行快速的定位。
4、上述情况都增加了仓储安全风险,为了能够对仓储的异常进行及时的监测,我们提出了一种基于5g的智能仓储异常监测方法及系统。
技术实现思路
1、本发明的目的在于提供基于5g的智能仓储异常监测方法及系统,通过巡检机器人对仓储车间内的异常环境扩散情况及时进行反馈,并能够及时可靠的对现场图像进行检测与拍摄。
2、为实现上述目的,本发明提供如下技术方案:基于5g的智能仓储异常监测方法,包括以下步骤:
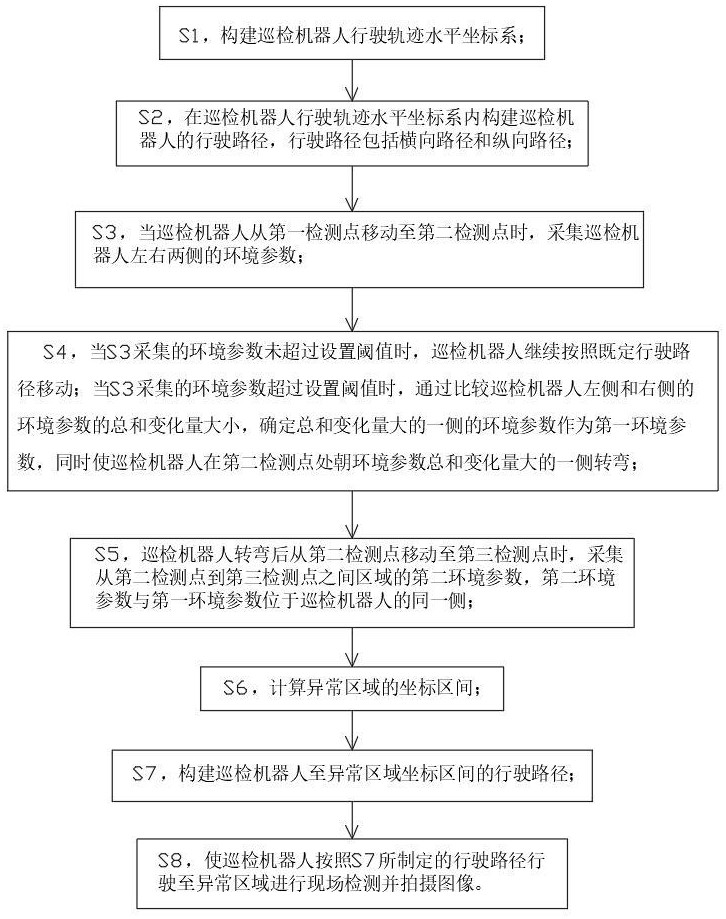
3、s1,构建巡检机器人行驶轨迹水平坐标系;
4、s2,在巡检机器人行驶轨迹水平坐标系内构建巡检机器人的行驶路径,行驶路径包括横向路径和纵向路径;
5、s3,当巡检机器人从第一检测点移动至第二检测点时,采集巡检机器人左右两侧的环境参数;
6、s4,当s3采集的环境参数未超过设置阈值时,巡检机器人继续按照既定行驶路径移动;
7、当s3采集的环境参数超过设置阈值时,通过比较巡检机器人左侧和右侧的环境参数的总和变化量大小,确定总和变化量大的一侧的环境参数作为第一环境参数,同时使巡检机器人在第二检测点处朝环境参数总和变化量大的一侧转弯;
8、s5,巡检机器人转弯后从第二检测点移动至第三检测点时,采集从第二检测点到第三检测点之间区域的第二环境参数,第二环境参数与第一环境参数位于巡检机器人的同一侧;
9、s6,计算异常区域的坐标区间,方法如下:
10、s601,计算第一环境参数总和变化量的第一加权平均值,将第一检测点到第二检测点之间环境参数变化量超过第一加权平均值的区间作为异常区域的第一坐标区间;
11、s602,计算第二环境参数总和变化量的第二加权平均值,将第二检测点到第三检测点之间环境参数变化量超过第二加权平均值的区间作为异常区域的第二坐标区间;
12、s603,确定第一坐标区间和第二坐标区间相交的区域为异常区域;
13、s7,构建巡检机器人至异常区域坐标区间的行驶路径;
14、s8,使巡检机器人按照s7所制定的行驶路径行驶至异常区域进行现场检测并拍摄图像。
15、优选的,第一环境参数和第二环境参数均包括温度、湿度以及气体参数。
16、优选的,在所述s4中,确定巡检机器人在第二检测点处转弯方向的方法如下:
17、s401,获取巡检机器人行驶路径左侧环境参数和右侧环境参数;
18、s402,对左侧环境参数和右侧环境参数分别进行归一化处理,去除量纲影响;
19、s403,分别计算左侧环境参数的第一总和变化量和右侧环境参数的第二总和变化量;
20、s404,比较第一总和变化量和第二总和变化量的大小;
21、若第一总和变化量大于第二总和变化量,则向左转弯;
22、若第一总和变化量小于第二总和变化量,则向右转弯;
23、若第一总和变化量等于第二总和变化量,则继续直行。
24、优选的,在s402中,对环境参数进行归一化处理的方法如下:
25、s4021,对各种类型的环境参数进行分类,包括温度参数、湿度参数、气体参数;
26、s4022,计算各环境参数与车间预设环境参数的差值;
27、s4023,对s4022中得到的每个差值进行归一化处理,公式如下:
28、;
29、其中,ti为经过归一化处理的第i次的温度采样值变化量,ti为第i次温度采样值与车间预设温度参数的差值,tmin为温度采样值中与车间预设温度参数的最小差值,tmax为温度采样值中与车间预设温度参数的最大差值;
30、;
31、其中,wi为经过归一化处理的第i次的湿度采样值变化量,wi为第i次湿度采样值与车间预设湿度参数的差值,wmin为湿度采样值中与车间预设湿度参数的最小差值,wmax为湿度采样值中与车间预设湿度参数的最大差值;
32、;
33、其中,qi为经过归一化处理的第i次的气体采样值变化量,qi为第i次气体采样值与车间预设气体参数的差值,qmin为气体采样值中与车间预设气体参数的最小差值,qmax为气体采样值中与车间预设气体参数的最大差值。
34、优选的,在s403中,计算环境参数总和变化量的公式如下:
35、;
36、其中,h为巡检机器人从第一检测点移动至第二检测点路径过程中的环境参数的总和变化量,n为温度采样次数。
37、优选的,在s601中,第一坐标区间的获取方法如下:
38、s6011,计算第一环境参数总和变化量的第一加权平均值,公式如下:
39、;
40、其中,α为温度权重系数,β为湿度权重系数,γ为气体权重系数。
41、s6012,计算第一环境参数中每次采样的环境参数变化量hi(i=1、2、3......n),公式如下:
42、;
43、s6013,以第一检测点到第二检测点的连线作为横轴,以每次的采样位置作为横坐标,以hi(i=1、2、3......n)的值作为纵坐标,绘制曲线s;同时绘制的水平线l;
44、s6014,找出曲线s位于水平线l上端的区间,所述区间所对应的横轴坐标区间即为异常区域的第一坐标区间。
45、优选的,在s602中,第二坐标区间的获取方法与第一坐标区间的获取方法相同。
46、基于5g的智能仓储异常监测系统,其包括:
47、巡检机器人,用于按照设定的行驶路径在仓储车间内对环境参数进行移动采集;
48、温湿度传感器,安装在巡检机器人上,用于采集巡检机器人周围的环境温度和湿度;
49、气体传感器,安装在巡检机器人上,用于采集巡检机器人周围的气体环境信息;
50、高清摄像头,安装在巡检机器人上,用于采集巡检机器人周围的图像和视频信息;
51、报警模块,安装在巡检机器人上,用于在检测值超过阈值时发出报警信号;
52、判断模块,安装在巡检机器人上,用于对巡检机器人行驶路径两侧的环境参数总和变化量大小进行比较,并根据比较结果确定巡检机器人的转向方向;
53、5g通信模块,安装在巡检机器人上,用于将巡检机器人采集的环境参数上传至云端处理器。
54、优选的,所述判断模块包括:
55、伸缩管,所述伸缩管共有两个且对称安装于巡检机器人两侧,温湿度传感器共有两个且分别安装于两个所述伸缩管的外端;
56、导气管,所述导气管共有两个且分别与两个伸缩管的内端连通,导气管的内部自与伸缩管的连接端到出口端内径逐渐减小,所述气体传感器共有两个且分别设置于两个导气管的出口端;
57、数据处理器,用于对两个温湿度传感器和两个气体传感器的检测结果进行比较。
58、优选的,在所述伸缩管的进气端设置有引风扇。
59、与现有技术相比,本发明的有益效果如下:
60、本发明的监测方法通过比较巡检机器人左右两侧的环境参数的总和变化量,能够及时的掌握异常环境在车间内的扩散情况。同时本技术的巡检机器人还能够对异常区间进行快速定位,当检测到车间内的异常时能够及时发出报警同时能够迅速驶向异常区域进行现场检测与拍摄。
- 还没有人留言评论。精彩留言会获得点赞!